一种激光器温度控制系统的软启动方法与流程
1.本发明属于激光气体检测领域,涉及一种激光器温度控制系统的软启动方法。
背景技术:
2.可调谐二极管激光吸收光谱技术(tdlas)是一种将激光应用于吸收光谱测量技术的光学和光谱学测量方法。tdlas利用半导体激光窄线宽和快速调谐的特性,通过检测吸收分子的一条孤立的振转吸收线,可以实现对气体的快速检测。激光气体检测装置是基于tdlas原理,通过单片机控制电路对激光器进行电流调制,使激光器发出特定波长的激光穿过气体监测区域后,到达反射面并被反射回光探测器,若激光穿过的气体区域中存在被检测的特征气体,激光将与被该气体吸收,特征气体浓度越高,吸收量越大,光探测器将监测到激光强度的变化并反馈至单片机控制电路进行处理,最终由信号输出电路将浓度结果显示出来。
3.目前采用可调谐半导体激光吸收光谱原理的(tdlas)检测装置,主要安装在工况条件恶劣的环境中长期工作,检测装置容易受到环境异常高温、低温及高湿度等因素影响,导致激光器与散热结构耦合效率衰减、激光器温度控制系统效率下降等现象。当环境温度差异过大时,由于上述问题导致激光器温控系统在上电时,启动电流过大产生温控电路震荡,致使检测装置测量偏差过大、测量失效,或者因本安电源限流,检测装置无法正常启动。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种激光器温度控制系统的软启动方法,以降低激光气体检测装置在上电阶段出现的温控电路瞬态大电流,同时减小激光器温度控制电路常规启动电流和启动功耗,保证整机工作稳定性,增加整机传输距离,满足工矿企业的长期安全生产需求。
5.为达到上述目的,本发明提供如下技术方案:
6.激光器温度控制系统包括微控制器、环境温度检测电路、激光器电流扫描电路、激光器温度负反馈控制系统,所述激光器温度负反馈控制系统包括数模转换模块、dfb激光器、pid控制单元、tec控制器;包括以下步骤:
7.s1:根据dfb激光器的热沉特性,调节pid控制单元参数,使激光器温度负反馈控制系统的响应时间t
rise
≤10s,系统的稳定建立时间t
setting
≤150s;
8.s2:微控制器禁止tec控制器上电工作,读取环境温度检测电路测量的环境温度为te;
9.s3:根据dfb激光器中心吸收峰对应的工作温度值,mcu设定激光器的目标温度ts;
10.s4:计算目标温度ts与环境温度te的温差,判断温差是否大于等于预设温差阈值;
11.s5:设定调节激光器温度的正向迭代总步长为nh,负向迭代总步长为nc,n=1,迭代间隔时间周期τ=t
rise
,t
rise
为激光器温度负反馈控制系统的冲激响应时间;
12.当温差大于等于预设温差阈值,在微控制器mcu启动集成tec控制器时,立即启动
注入激光器扫描电流i
l
,协同集成tec控制器给dfb激光器加热,然后计算调节激光器温度值f(n);
13.当温差小于等于预设温差阈值,则在激光器完成温度迭代调节软启动前,激光器停止注入扫描电流i
l
,以减小激光器温控系统的启动电流,先计算调节激光器温度值f(n);
14.s6:令n=n+1,当n小于正向迭代总步长或负向迭代总步长时,对调节激光器温度值f(n)进行迭代;当n等于正向迭代总步长或负向迭代总步长时,结束迭代;
15.s7:根据迭代次数n计算软启动时间t
soft
,使激光温度控制系统延迟t
soft
启动。
16.进一步,所述预设温差阈值为5℃。
17.进一步,在所述s5中,计算调节激光器温度值f(n)的方法为:
[0018][0019]
其中,n=1,2,3
…
nh,nc(n=nc≥5)。一般nc≥nh≥5时,大幅减小tec启动工作电流i。
[0020]
进一步,所述s7中,计算软启动时间t
soft
的方法具体为:
[0021]
t
soft
=τ
·
nc=t
rise
·
n。
[0022]
进一步,所述s5中,扫描工作电流i
l
的注入扫描时间为:
[0023][0024]
其中,ε(n)为单位阶跃函数,n=1,2,3
…
nc(n=nc≥5)。
[0025]
进一步,激光器温度负反馈控制系统的响应时间t
rise
≤6s,系统的稳定建立时间t
setting
≤120s。本方案采取更加精确的范围数值,计算出的软启动延迟时间对于系统启动整体的稳定性更好。
[0026]
本发明的有益效果在于:
[0027]
采用本方案后,可大幅减小温控系统启动电流i,避免由于启动电流i过大使热电制冷器tec处于低效能值区域,从而避免温控系统由负反馈反转为正反馈统产生自激震荡,进而提高温控系统的稳定性,避免因温控系统崩溃导致传感器无法正常启动和工作。同时,温控系统的启动i幅值明显减小,使激光气体传感器最远带载传输距离达到6km以上。
[0028]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0029]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0030]
图1为激光器温度控制系统软启动原理框图;
[0031]
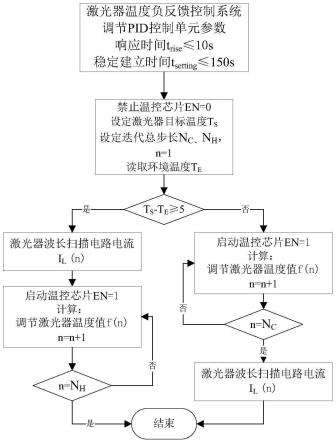
图2为激光器温控系统软启动算法流程;
[0032]
图3为dac温度设置电路及环境温度采用电路;
[0033]
图4为激光器波长扫描电路;
[0034]
图5为go(s)冲激响应曲线;
[0035]
图6为高温60℃温控瞬态启动大电流;
[0036]
图7为高温60℃温控软启动瞬态大电流;
[0037]
图8为本方法启动下可达到的最远带载传输距离实验结果。
具体实施方式
[0038]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0039]
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0040]
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0041]
请参阅图1~图8。如图1和图2所示,为一种激光器温度控制系统的软启动方法的原理和流程,激光器温度控制系统主要包括微控制器mcu、环境温度检测电路、激光器电流扫描电路和激光器温度负反馈控制系统,激光器温度负反馈控制系统包括dac数模转换模块、dfb激光器、pid控制单元和集成tec控制器。其中部分电路示意图如图3和图4所示,该部分为现有技术,不多赘述。
[0042]
本方法包括以下步骤:
[0043]
s1:根据dfb激光器的热沉特性,调节pid控制单元参数,使激光器温度负反馈控制系统的响应时间t
rise
≤10s,系统的稳定建立时间t
setting
≤150s。
[0044]
s2:微控制器禁止tec控制器上电工作,读取环境温度检测电路测量的环境温度为te。
[0045]
s3:根据dfb激光器中心吸收峰对应的工作温度值,mcu设定激光器的目标温度ts。
[0046]
s4:计算目标温度ts与环境温度te的温差,判断温差是否大于等于预设温差阈值。
[0047]
s5:设定调节激光器温度的正向迭代总步长为nh,负向迭代总步长为nc,n=1,迭代间隔时间周期τ=t
rise
,t
rise
为激光器温度负反馈控制系统的冲激响应时间。
[0048]
当温差大于等于预设温差阈值,在微控制器mcu启动集成tec控制器时,立即启动注入激光器扫描电流i
l
,协同集成tec控制器给dfb激光器加热,然后计算调节激光器温度
值f(n)。
[0049]
当温差小于等于预设温差阈值,则在激光器完成温度迭代调节软启动前,激光器停止注入扫描电流i
l
,以减小激光器温控系统的启动电流,先计算调节激光器温度值f(n)。
[0050]
算调节激光器温度值f(n)的方法为:
[0051][0052]
其中,n=1,2,3
…
nh,nc(n=nc≥5)。
[0053]
为减小激光器波长扫描电路工作电流i
l
,对激光器温控系统启动工作电流i的扰动影响,扫描工作电流i
l
的注入扫描时间如下所示:
[0054][0055]
其中,ε(n)为单位阶跃函数,
[0056]
n=1,2,3
…
nc(n=nc≥5)
[0057]
即,当ts-te≥5℃时,激光器设置工作温度大于等于环境温度5℃,在温控系统上电时,立即启动注入激光器扫描电流,协同热电制冷器tec给激光器加热;反之,ts-te<5℃时,则在激光器完成温度迭代调节软启动前,激光器停止注入扫描电流,以减小激光器温控系统的启动电流。
[0058]
s6:令n=n+1,当n小于正向迭代总步长或负向迭代总步长时,对调节激光器温度值f(n)进行迭代;当n=正向迭代总步长或负向迭代总步长时,结束迭代。
[0059]
s7:根据迭代次数n计算软启动时间t
soft
,使激光温度控制系统延迟t
soft
启动。
[0060]
下面举一个具体例子证明本方法的效果:
[0061]
设定温控系统pid控制单元的传递函数gc(s):
[0062][0063]
tec控制执行单元控制增益k
tec
=5v/v;ke取最大增益约5v/℃;dfb激光器的传递函数g
l
(s):
[0064][0065]
激光器温度负反馈控制系统开环传递函数go(s):
[0066][0067]
通过matlab控制系统工具箱和simulink仿真测试环境,go(s)的冲激响应曲线如图5所示。系统响应上升时间t
rise
=5s,系统建立时间t
setting
=35~40s之间。激光器温度控制系统设定的激光器工作温度为25℃,设定温度迭代调节总步长nc=n=10,在实验室高低温箱中进行60℃的启动电流测试。
[0068]
在无软启动算法的情况下,在60℃整机温控启动瞬态大电流达到0.5a@12vdc,如图6所示。
[0069]
在启用激光器温控系统软启动算法后,在60℃整机温控启动瞬态大电流均减小到约0.12a@12vdc,如图7所示。通过整机上电实验,温控系统软启动算法大幅度减小了整机瞬
态启动电流,在本安电源供电条件下,整机最远传输距离达到6km以上(根据传感器启动工作电流可计算得出),如图8所示。
[0070]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1