可通行路径生成方法及装置、计算设备、移动工具、存储介质与流程
本发明涉及自主驾驶,尤其涉及一种可通行路径生成方法、可通行路径生成装置、应用该方法的计算设备,以及包含该可通行路径生成装置或计算设备的移动工具和存储介质。
背景技术:
1、随着人工智能技术以及现代制造业的发展,自动驾驶技术已经逐渐走进人们的日常生活,潜移默化的改变着人们的出行方式。无人驾驶技术可以简要的分为感知、预测、定位、决策、规划与控制几个方面。规划通常指路径规划,其主要任务是指根据当前车俩信息合理探索环境空间,最终规划出一条便于控制器执行、无碰撞的路径。现有的路径规划方法包括基于搜索算法的路径规划、基于采样算法的路径规划、以及基于强化学习算法的路径规划等多种。基于这些规划算法得到的备选路径可能不止一条,因此,在初步规划出备选路径之后,就还需要对规划出的备选路径进行最优路径选择,以生成最终的可通行路径供控制器执行。
2、目前,在进行最优路径选择时,常用的方法是为备选路径确定出评价指标,并为评价指标分配固定的权重,之后利用设计的算法计算评价指标的费用代价值,并根据各个评价指标的费用代价值和为其分配的固定权重计算出各个备选路径的总代价值,最后根据各个备选路径的总代价值筛选出最优路径。在这种最优路径选择方法中,计算出的费用代价值能否准确反映备选路径的实际特征,是决定是否能够准确选取出最优路径的关键因素。然而,由于现有的方法中往往是为评价指标直接分配固定的权重,且在确定各个评价指标的费用评价值时往往也仅考虑了单一因素,因此基于此选取的最优路径往往是错误的,并不能准确选取出真正最优的路径。因此,提供一种能够更准确反映备选路径的实际特点以提高选取出的最优路径的准确率的最优路径选择方案,已成为业内急需解决的重要难题。
技术实现思路
1、本发明实施例提供一种可通行路径生成方案,以至少解决现有技术中的最优路径选择方法因费用评价考虑因素单一、权重仅仅是靠直接分配固定值等,因而难以准确对路径做出评价,导致容易选取出错误的最优路径的问题。
2、第一方面,本发明实施例提供一种可通行路径生成方法,其包括:
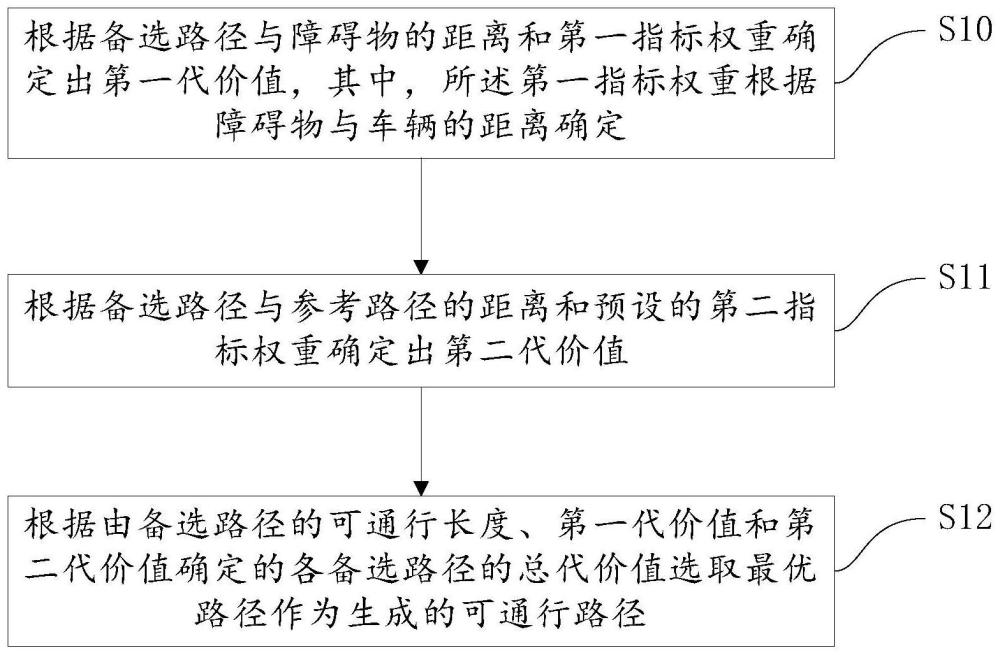
3、根据备选路径与障碍物的距离和第一指标权重确定出第一代价值,其中,所述第一指标权重根据障碍物与车辆的距离确定;
4、根据备选路径与参考路径的距离和预设的第二指标权重确定出第二代价值;
5、根据由备选路径的可通行长度、第一代价值和第二代价值确定的各备选路径的总代价值选取最优路径作为生成的可通行路径。
6、第二方面,本发明实施例提供一种可通行路径生成装置,其包括:
7、第一指标代价确定模块,用于根据备选路径与障碍物的距离和第一指标权重确定出第一代价值,其中,所述第一指标权重根据障碍物与车辆的距离确定;
8、第二指标代价确定模块,用于根据备选路径与参考路径的距离和预设的第二指标权重确定出第二代价值;
9、最优路径筛选模块,用于根据由备选路径的可通行长度、第一代价值和第二代价值确定的各备选路径的总代价值选取最优路径作为生成的可通行路径。
10、第三方面,本发明实施例提供一种计算设备,其包括:
11、存储器,用于存储可执行指令;以及
12、处理器,用于执行存储器中存储的可执行指令,所述可执行指令在由所述处理器执行时实现本发明第一方面提供的方法步骤。
13、第四方面,本发明实施例提供了一种移动工具,其包括根据本发明第三方面所述的计算设备。
14、第五方面,本发明实施例提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面提供的方法的步骤。
15、第六方面,本发明实施例提供了一种计算机程序产品,所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行上述第一方面提供的方法。
16、本发明实施例的有益效果在于:本发明实施例提供的方法在确定备选路径的费用代价值时,综合考虑了备选路径与障碍物的距离、障碍物与车辆的距离、备选路径的可通行长度以及备选路径与参考路径的距离,特别是在确定第一代价值时,同时考虑了备选路径与障碍物的距离和障碍物与车辆的距离,因而确定出的代价值更能反映路径的实际情况和特点,使得确定出的最优路径的准确率更高;并且,本发明实施例的方法在对备选路径与障碍物的靠近程度这一评价指标进行评价时,是基于障碍物与车辆的距离动态确定和调整该指标的评价系数的,因而能够大幅提升选取出的最优路径的避障效果和居中效果,进一步提高确定出的最优路径的准确率。
技术特征:
1.一种可通行路径生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述备选路径与参考路径的距离是由备选路径的终点到在参考路径上选取的引导点之间的第一距离和备选路径的终点到车辆与所述引导点的连线之间的第二距离共同定义。
3.根据权利要求2所述的方法,其特征在于,所述引导点为在所述参考路径上选取的方向变化角度大于设定角度阈值的折点,且所述折点与车辆的距离大于设定距离阈值。
4.根据权利要求3所述的方法,其特征在于,所述根据备选路径与参考路径的距离和预设的第二指标权重确定出第二代价值,包括:
5.根据权利要求1至4任一项所述的方法,其特征在于,所述第一指标权重随障碍物与车辆的距离的变化而变化,且与障碍物与车辆的距离呈负相关。
6.根据权利要求1至4任一项所述的方法,其特征在于,所述根据备选路径与障碍物的距离和第一指标权重确定出第一代价值,包括:
7.根据权利要求6所述的方法,其特征在于,备选路径与障碍物的距离通过以下方式确定:
8.根据权利要求6所述的方法,其特征在于,所述根据备选路径与障碍物的距离以及第一指标权重计算得到第一代价值,包括:
9.根据权利要求6所述的方法,其特征在于,车辆与障碍物的距离通过以下方式确定:
10.一种可通行路径生成装置,其特征在于,所述装置包括:
11.一种计算设备,其特征在于,包括:
12.移动工具,其特征在于,所述移动工具包括:权利要求11所述的计算设备。
13.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1至9中任意一项所述方法的步骤。
14.一种计算机程序产品,所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行权利要求1至9中任一项所述的方法。
技术总结
本发明公开一种可通行路径生成方法及装置,方法包括根据备选路径与障碍物的距离和第一指标权重确定出第一代价值,其中,所述第一指标权重根据障碍物与车辆的距离确定;根据备选路径与参考路径的距离和预设的第二指标权重确定出第二代价值;根据由备选路径的可通行长度、第一代价值和第二代价值确定的各备选路径的总代价值选取最优路径作为生成的可通行路径。本发明实施例提供的方案确定出的代价值更能反映路径的实际情况和特点,使得确定出的最优路径的准确率更高,且能够大幅提升选取出的最优路径的避障效果和居中效果,进一步提高确定出的最优路径的准确率。
技术研发人员:梁建,任巨龙,张哲
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!