一种爬架智能顶升控制系统的制作方法
1.本发明属于爬架起升控制领域,具体是一种爬架智能顶升控制系统。
背景技术:
2.在建造房屋时,建筑工人通常需要使用爬架进行高空作业,尤其在建筑楼层较高的建筑屋时,对爬架的安全性需要十分关注。目前爬架从传统型转化为新型,即附着式升降脚手架,该设备是本世纪初快速发展起来的新型脚手架技术,更经济、更安全、更便捷。
3.目前新型爬架得到广泛使用,但在使用时仍然需要人工对爬架的提升进行检查和操作;不够智能化,且效率低。
4.为此,本发明提出了一种爬架智能顶升控制系统。
技术实现要素:
5.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种爬架智能顶升控制系统,该种爬架智能顶升控制系统解决了目前建筑高空作业所使用的爬架仍需要人工操作,效率低的问题。
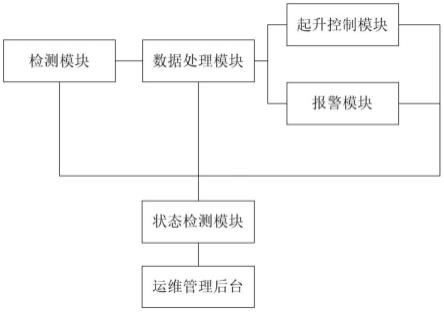
6.为实现上述目的,根据本发明的实施例提出一种爬架智能顶升控制系统,包括:检测模块、数据处理模块、报警模块、起升控制模块、状态检测模块以及运维管理后台;
7.所述检测模块用于对影响爬架升降过程中的参数进行检测获取,并将检测获取的数据发送至数据处理模块;所述检测模块包括拉力检测单元、平衡检测单元、位移检测单元、起升速度检测单元以及风速检测单元;
8.所述数据处理模块用于对检测模块发送的检测数据进行处理,在当前爬架是否运动的情况下,通过对爬架的拉力值、倾斜度、起升位移、起升速度以及爬架所处环境的风速与预设的阈值进行比较,从而给出相应的控制指令至所述起升控制模块,以及发送相应的提示信息至报警模块;
9.所述报警模块用于对数据处理模块发送的提示信息进行语音播报;
10.所述起升控制模块用于根据数据处理模块发送的控制指令对相应爬架的运行情况进行控制;
11.所述状态检测模块用于对各个模块的状态是否正常进行检测,若其中任意一个模块发生异常,则将异常模块的地址和名称发送至运维管理后台;
12.所述运维管理后台根据异常情况,通知维修人员前往相应地点进行维修。
13.进一步地,所述拉力检测单元设置在起升装置上,用于对起升装置起重爬架的拉力进行检测,即当前爬架的重量;若拉力值大于等于拉力阈值,则数据处理模块发送停止起升的控制指令至起升控制模块,以及爬架超重的提示信息至报警模块;起升控制模块控制所有爬架的起升装置暂停运行,同时控制防坠装置进行制动保护爬架;报警模块通过语音播报爬架超重的提示信息。
14.进一步地,所述平衡检测单元用于在爬架升降过程或稳定时对爬架整体是否处于
水平平衡状态进行检测;若爬架倾斜度大于等于倾斜度阈值,则数据处理模块发送停止起升的控制指令至起升控制模块,以及爬架倾斜度超标的提示信息至报警模块;起升控制模块立即控制所有爬架的起升装置暂停运行,同时控制防倾装置进行制动保护爬架;报警模块通过语音播报爬架倾斜度超标的提示信息。
15.进一步地,所述位移检测单元用于对爬架在竖直方向上的起升位移进行实时检测,所述起升速度检测单元用于对爬架的起升速度以及速度方向进行检测。
16.进一步地,数据处理模块将爬架起升位移标记为xi,并将实时获取的起升位移进行排序,计算最大起升位移xmax和最小起升位移xmin的最值位移差xj,预设最值位移差的阈值为xjs;其中i表示爬架编号,i=1,2,
……
i;
17.若xj≥xjs,则数据处理模块发送停止起升的控制指令至起升控制模块,并发送最大起升位移的爬架编号和起升-(xmax+xmin)/2的距离,以及最小起升位移的爬架编号和起升(xmax+xmin)/2的距离至起升控制模块;数据处理模块还发送起升位移差超标的提示信息至报警模块;起升控制模块控制所有爬架的起升装置暂停运行,并根据对应的起升距离控制对应编号的爬架的提升装置进行降低或上升爬架;报警模块通过语音播报起升位移差超标的提示信息;
18.若xj<xjs,则数据处理模块计算所有爬架起升位移的位移平均值xa,并将所有爬架的起升位移与位移平均值相减,得到对应编号的爬架位移差绝对值|xi-xa|,预设位移差值的最大绝对值为xb。
19.进一步地,若所有爬架|xi-xa|≤xb,则数据处理模块不作相应处理,若爬架中出现|xi-xa|>xb,则数据处理模块根据爬架起升速度进行分析;
20.若此时所有编号的爬架暂停运动,则数据处理模块发送对应编号的爬架起升位移起升
±
|xi-xa|控制指令至起升控制模块,起升控制模块控制对应编号爬架的起升装置上升或下降|xi-xa|的距离;
21.若所有爬架均处于起升状态,则数据处理模块将所有爬架的起升速度按照大小排序,将爬架起升速度标记为qvi,预设起升速度阈值qvs;若qvi>qvs,则数据处理模块发送降低对应编号爬架起升速度至qvs的控制指令至起升控制模块,起升控制模块控制对应编号爬架的起升装置的起升速度降至qvs;若qvi≤qvs,则数据处理模块计算除去所有|xi-xa|>xb编号的爬架所剩下的爬架起升速度的平均值qva,将所有|xi-xa|>xb编号的爬架起升速度qvi减去qva得到速度差值|qvi-qva|,数据处理模块将获取的对应编号爬架的速度差值发送至起升控制模块,起升控制模块根据速度差值提升或降低对应编号爬架的提升装置的起升速度,直至满足速度平均值qva。
22.进一步地,所述风速检测单元用于对爬架所处自然环境中的风速进行检测,若风速大于等于风速阈值,则数据处理模块发送停止起升的控制指令至起升控制模块,以及风速超标的提示信息至报警模块;起升控制模块控制所有爬架的提升装置停止运行,报警模块通过语音播报风速超标的提示信息,提醒相关工作人员有序疏散。
23.与现有技术相比,本发明的有益效果是:
24.1、本发明通过检测模块对影响爬架升降过程中的参数的检测获取,并将检测获取的数据发送至数据处理模块;所述检测模块包括拉力检测单元、平衡检测单元、位移检测单元、起升速度检测单元以及风速检测单元;能够从影响爬架升降过程中的各种因素进行检
测,大大提高了后续数据处理模块对起升控制模块的控制精度和密度,使得爬架的升降过程更加精细化。
25.2、数据处理模块对检测模块发送的检测数据进行处理,在当前爬架是否运动的情况下,通过对爬架的拉力值、倾斜度、起升位移、起升速度以及爬架所处环境的风速与预设的阈值进行比较,从而给出相应的控制指令至所述起升控制模块,以及发送相应的提示信息至报警模块;报警模块对提示信息进行语音播报;起升控制模块根据控制指令对相应爬架的运行情况进行控制;状态检测模块对各个模块的状态是否正常进行检测,若其中任意一个模块发生异常,则将异常模块的地址和名称发送至运维管理后台;此处的状态检测模块能够检测所有模块的状态,提高了各模块运行的准确度,也提升了爬架上升过程中的安全性。
附图说明
26.图1为本发明的系统结构示意图。
具体实施方式
27.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
28.如图1所示,一种爬架智能顶升控制系统,包括:检测模块、数据处理模块、报警模块、起升控制模块、状态检测模块以及运维管理后台;
29.在本技术中,所述检测模块用于对影响爬架升降过程中的参数进行检测获取;其中,所述检测模块设置在爬架中;所述检测模块包括拉力检测单元、平衡检测单元、位移检测单元、起升速度检测单元以及风速检测单元;在实际建造作业时,建筑的不同侧设置有不同或相同数量的爬架,所有的爬架通过连接件拼接完成;在作业过程中,建筑物四周的所有爬架都需要做到升降同步;爬架主要通过起升装置进行升降,起升装置一般为钢丝绳电动葫芦或环链电动葫芦;
30.所述拉力检测单元设置在起升装置上,用于对当前起升装置起重爬架的拉力进行检测,即当前爬架的重量,并将检测获取的拉力值发送至数据处理模块;
31.所述平衡检测单元用于在爬架升降过程或稳定时对爬架整体是否处于水平平衡状态进行检测,并将检测获取的爬架倾斜度发送至数据处理模块;在本发明的实时例中,可以通过水平测量仪进行检测爬架的倾斜度或通过测量重锤线与爬架走道板的夹角来确定,还可以通过在爬架的走道板上方或下方每隔单位距离设置一个红外线发射器,若在单位距离内红外线发射器发射的红外线被爬架材料折射,计算折射率,根据折射率判断爬架走道板的形变程度,以及整个爬架的倾斜程度;
32.所述位移检测单元用于对爬架在竖直方向上的起升位移进行实时检测,并将检测获取的爬架起升位移发送至数据处理模块;具体地,所述位移检测单元可以为位移传感器,设置在每个爬架的中点,将爬架从地面开始起升时的位移记为0,则爬架在上升或下降的过程中,爬架实时所处的高度即为爬架的起升位移;
33.所述起升速度检测模块用于对爬架的起升速度以及速度方向进行检测,并将检测获取的起升速度发送至数据处理模块;在本发明的实施例中,可以通过起升装置上的起升速度检测装置进行检测获取;
34.所述风速检测单元用于对爬架所处自然环境中的风速进行检测,并将检测获取的风速发送至数据处理模块;具体地,可以使用风速检测仪进行检测。
35.在本技术中,所述数据处理模块用于对检测模块发送的检测数据进行处理,具体处理过程如下:
36.步骤s01:数据处理模块将实时获取的拉力值标记为fli,将爬架倾斜度标记为di,将爬架起升位移标记为xi,将爬架起升速度标记为qvi,将风速标记为fv;其中i表示爬架编号,i=1,2,
……
i;
37.步骤s02:数据处理模块将拉力阈值标记为fls,若fli≥fls,则数据处理模块发送停止起升的控制指令至起升控制模块,同时数据处理模块发送爬架超重的提示信息至报警模块;
38.起升控制模块立即控制所有爬架的起升装置暂停运行,同时控制防坠装置进行制动保护爬架,防止爬架下坠;报警模块通过语音播报爬架超重的提示信息,提醒相关工作人员疏散,或者将爬架上的物资搬运均匀分布在爬架上;
39.将爬架倾斜度的阈值标记为ds,若di≥ds,则数据处理模块发送停止起升的控制指令至起升控制模块,以及爬架倾斜度超标的提示信息至报警模块;
40.起升控制模块立即控制所有爬架的起升装置暂停运行,同时控制防倾装置进行制动保护爬架,防止爬架倾翻;报警模块通过语音播报爬架倾斜度超标的提示信息,相关工作人员站在原地不动,或者缓慢前往相邻正常爬架进行疏散;
41.步骤s03:数据处理模块将实时获取的起升位移进行排序,计算最大起升位移xmax和最小起升位移xmin的最值位移差xj,预设最值位移差的阈值为xjs;
42.若xj≥xjs,则数据处理模块发送停止起升的控制指令至起升控制模块,并发送最大起升位移的爬架编号和起升-(xmax+xmin)/2的距离,以及最小起升位移的爬架编号和起升(xmax+xmin)/2的距离至起升控制模块;数据处理模块还发送起升位移差超标的提示信息至报警模块;需要说明的是,起升距离的正值表示上升,负值表示下降;
43.起升控制模块立即控制所有爬架的起升装置暂停运行,并根据对应的起升距离控制对应编号的爬架的提升装置进行降低或上升爬架;
44.报警模块通过语音播报起升位移差超标的提示信息,通知相关工作人员保持静止,等待处理;
45.若xj<xjs,则数据处理模块计算所有爬架起升位移的位移平均值xa,并将所有爬架的起升位移与位移平均值相减,得到对应编号的爬架位移差绝对值|xi-xa|,预设位移差值的最大绝对值为xb;
46.若所有爬架|xi-xa|≤xb,则数据处理模块不作相应处理;
47.若爬架中出现|xi-xa|>xb,则数据处理模块根据爬架起升速度进行分析;
48.若此时所有编号的爬架暂停运动,则数据处理模块发送对应编号的爬架起升位移起升
±
|xi-xa|控制指令至起升控制模块,起升控制模块控制对应编号爬架的起升装置上升或下降|xi-xa|的距离;
49.若所有爬架均处于起升状态,则数据处理模块将所有爬架的起升速度实时按照大小排序,预设起升速度阈值qvs;若qvi>qvs,则数据处理模块发送降低对应编号爬架起升速度至qvs的控制指令至起升控制模块,起升控制模块控制对应编号爬架的起升装置的起升速度降至qvs;若qvi≤qvs,则数据处理模块计算除去所有|xi-xa|>xb编号的爬架所剩下的爬架起升速度的平均值qva,将所有|xi-xa|>xb编号的爬架起升速度qvi减去qva得到速度差值|qvi-qva|,数据处理模块将获取的对应编号爬架的速度差值发送至起升控制模块,起升控制模块根据速度差值提升或降低对应编号爬架的提升装置的起升速度,直至满足速度平均值qva;
50.步骤s04:数据处理模块将风速的阈值标记为fvs,若fv大于等于fvs,则数据处理模块发送停止起升的控制指令至起升控制模块,以及风速超标的提示信息至报警模块;
51.起升控制模块立即控制所有爬架的提升装置停止运行,报警模块通过语音播报风速超标的提示信息,提醒相关工作人员有序疏散;
52.所述状态检测模块用于对检测模块、数据处理模块、报警模块以及起升控制模块的运行状态,其中任意一个模块发生异常,则状态检测模块将检测出的异常模块发送至运维管理后台,运维管理后台通知维修人员前往维修。
53.上述公式均是去除量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最接近真实情况的一个公式,公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者大量数据模拟获得。
54.在本发明所提供的实施例中,应该理解到,所揭露的设备,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式;所述作为分离部件说明的模块可以是或者也可以不是物理上分开的,作为模块显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方法的目的。
55.以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1