面向无人机集群机间组网的中继通信控制方法
本发明涉及无人机集群控制,尤其涉及一种面向无人机集群机间组网的中继通信控制方法。
背景技术:
1、无人机以群体方式应用,通过空中组网实现多种任务作业,如多无人机救灾构建区域空中应急通信基站、多无人机执行区域协同救援搜索等,无人机之间的空中通信是构建无人机集群信息网络的关键。然而,由于地形、建筑物等环境、无人机机间距离和飞行姿态等因素的影响,导致机间直接通信质量无法支持任务信息传递,例如在城市救灾应急通信中搭载通信机载的无人机之间收到高层建筑或山地影响无法直接通信,而形成通信孤岛。对此,采用中继通信无人机进行空中机间通信补网,构建协同通信层,保持无人机群体中机间通信的畅通,确保任务顺利执行。
2、无人机众多领域应用广泛,其中中继通信是无人机重要应用方向。相比于基于地面基站以及卫星系统通信,无人机中继通信有着明显优势:首先,快速部署,借助于中低空无人机快速机动特性,在很多情况下可以建立短距视距和中远距离非视距通信链路,改进通信节点之间通信性能;其次,位姿便于调整,动态调整空中无人机运动和姿态适应通信环境变化(例如地形遮蔽、阴雨天衰减/通信噪声或干扰等),提升了通信链路的环境适应性;最后,维护成本低,无人机系统运行和维护成本更低,起飞与回收较为灵活,可随时部署展开作业,适合于意外发生的或者持续时间短的任务。
3、无人机在通信中继方面发挥着重要的作用,有三个方面的典型应用研究。一是区域覆盖与应急通信:部署无人机协助现有的通信基础设施从而在服务区域提供无缝的无线覆盖,其应用场景包括由于自然灾害造成的基础设施损坏以及极其拥挤的区域下的基站过载;二是远程通信:无人机通信中继在没有可靠直连链路的两个远程用户或用户组之间提供无线连接,例如在前线和命令中心之间用于紧急响应;三是信息收集和分发,无人机辅助信息分发和数据收集,派遣无人机向大量分布式无线设备(例如,精密农业应用中的无线传感器)分发或者从无线设备收集延迟容忍消息。
4、对于中继无人机应用于无人机与地面站之间以及空中无人机之间协同通信方法及应用的研究主要面临三个方面的挑战:一是什么时候需要中继通信,即中继无人机的加入时刻与位置;二是如何实时规划中继无人机飞行路径确保链路两端通信正常;三是集群中多架无人机因任务/目标聚合或分离(例如,多机聚合形成一个编队,协同侦查打击某一目标,任务完成后多机分散,通过在线资源协调,与其它无人机聚合协同执行下一个任务),而产生集群拓扑关系变化,在此条件下如何确保机间网的通信质量。
5、在协同通信应用中,中继通信往往是提高吞吐量、可靠性以及扩展通信范围的有效方式。根据服务对象和传输业务不同,无人机中继应用可主要划分为两类:中继无人机定位式区域覆盖通信、中继无人机运动式区域覆盖通信中继无人机静态覆盖区域通信、单中继无人机动态覆盖区域通信以及多中继无人机动态覆盖区域通信。目前,针对无人机通信中继的研究大多针对地面用户,然而针对战场复杂的环境,中继用户不再是在地面上静止或者运动速度很小的用户,面对的是覆盖范围很广、具备高速运动性的无人机集群。无人机集群会被划分为不同的小组在不同的区域执行任务,期间不仅需要保持无人机与地面站之间的通信,无人机之间也需交换信息。因此何时调度中继无人机以及为中继无人机规划路径成了必须要考虑的问题。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、集群网络通信性能与通信质量好、灵活性强的面向无人机集群机间组网的中继通信控制方法,能够实现中继无人机智能接入规划与自主路径规划。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种面向无人机集群机间组网的中继通信控制方法,步骤包括:
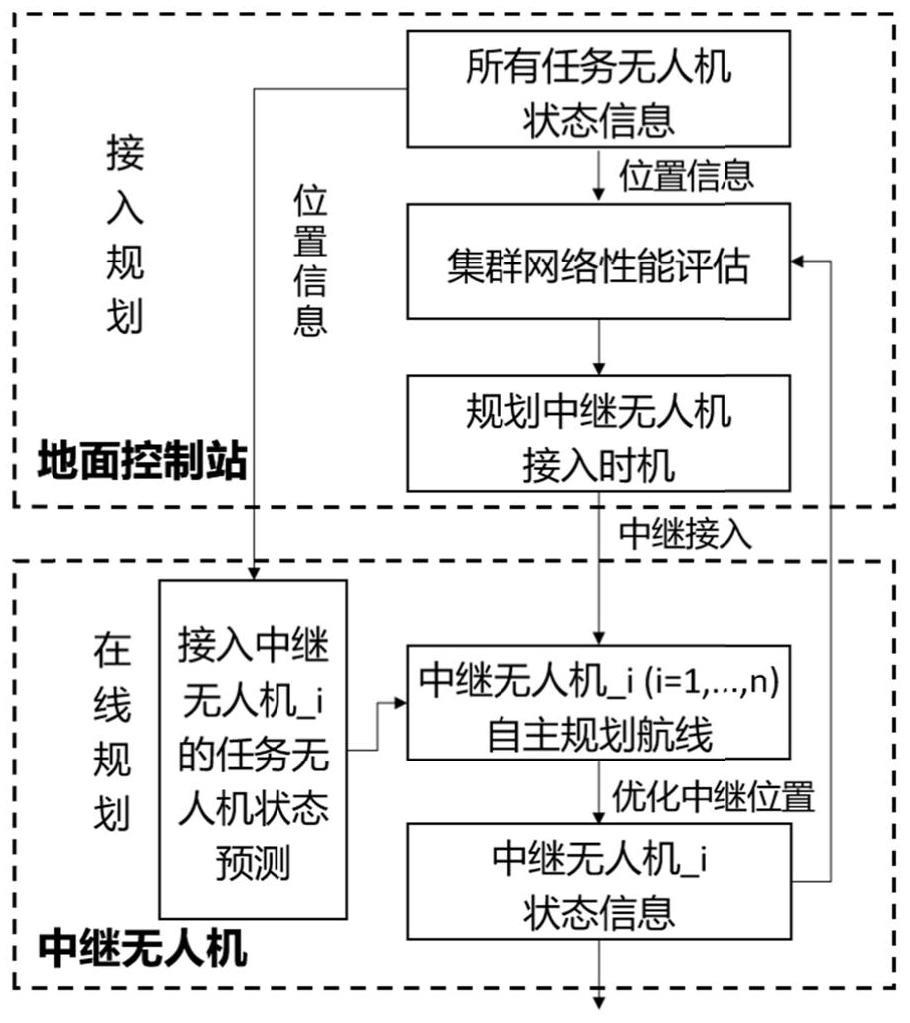
4、s01.在接入规划阶段时,根据各任务无人机的航迹规划以及飞行速度,对任务无人机的通信中继需求进行分析,获取所需中继的任务无人机的位置关系以及初步确定所需中继无人机的最小数量;根据获取的所需中继的任务无人机的位置关系以及初步确定所需中继无人机的最小数量,最终确定所需中继无人机数量以及首次接入的时刻与位置;
5、s02.在线规划阶段时,获取所有任务无人机的当前位置信息以及历史位置信息进行融合估计,预测出各任务无人机的运动状态,并以全局连接性最优为目标规划各中继无人机的路径,得到各中继无人机的运行状态输出以控制各中继无人机。
6、进一步的,所述步骤s01中,对任务无人机的通信中继需求进行分析的步骤包括:
7、s101.按照各任务无人机的速度,以相同时间步长获取航路上对应的航点位置信息,构成任务无人机的航路点数据库;
8、s102.按照时间步长顺序访问所有无人机的所述航路点数据库,并按照时间步长生成不同时刻的最小生成树;
9、s103.遍历每个所述最小生成树的每条连接边,计算每条连接边的连接性值,若目标连接边的连接性值大于预设阈值,则获取目标连接边以及对应的两任务无人机形成所需中继的无人机及时序,根据所需中继的无人机的时序之间是否包含相同连接点,初步确定所需中继无人机的最小数量。
10、进一步的,所述步骤s103中,通过将连接性值大于预设阈值的连接边和对应时刻以及对应无人机之间的拓扑关系构建中继链路需求时序库。
11、进一步的,所述步骤s01中,最终确定所需中继无人机数量以及首次接入的时刻与位置的步骤包括:
12、s111.读取中继链路需求时序库中数据,判断是否满足预设调用条件,如果是则转入步骤s112,否则返回执行步骤s111;
13、s112.选取一个中继无人机在集群任务区域的网络节点位置;
14、s113.根据当前时刻任务无人机位置计算最小生成树网络拓扑;
15、s114.计算全局网络链路连接性值并进行排序;
16、s115.判断当前最差链路连接性值是否大于预设阈值,如果是则增加1架中继无人机并返回步骤s112以选取下一个中继无人机的位置,否则输出当前得到的中继无人机数量以及接入的位置。
17、进一步的,所述步骤s111包括:判断输入的中继无人机节点对序列是否存在相同时刻的共连接点,如果不存在共连接点则判定满足调用条件,如果存在共连接点则先执行共用中继无人机方法调度,若执行所述共用中继无人机方法调度后仍存在连接边的连接性值大于预设阈值,则增加一架中继无人机再转入步骤s112以启动中继无人机接入规划。
18、进一步的,所述步骤s02中采用卡尔曼滤波方法对任务无人机运动状态进行融合估计,以预测无人机运动状态,包括:
19、在预测阶段,根据k-1时刻状态的最优估计值预测当前时刻的状态,其中使用加速度动力学模型估计任务无人机的运动;
20、在观测更新阶段,根据实际测量的状态值,使用任务无人机获得的实际测量值对预测值进行修正,得到当前k时刻的最优状态估计。
21、进一步的,所述加速度动力学模型的离散系统方程表示为:
22、xm(k+1)=fkxm(k)+ηk
23、其中,为任务无人机在k时刻的状态,所述状态包括任务无人机x和y方向的坐标、速度以及加速度,ηk表示加速度特性的过程噪声,σ2表示所采用的高斯白噪声的方差,fk为任务无人机运动状态转移矩阵,即为:
24、
25、其中,α为根据所需模拟的运动物体类型所预设的系数值。
26、进一步的,采用分布式模型预测控制(distributed model predictive control,dmpc)方法在线规划中继无人机的路径,其中每个中继无人机独立地根据估计的任务无人机位置以及其他无人机位置对未来状态进行预测,并根据预测结果优化当前中继无人机自身的控制输入。
27、进一步的,所述采用分布式模型预测控制dmpc方法在线规划中继无人机的路径中,为每个无人机节点构造假定的控制输入和输出状态时,假定控制输入量是上一时刻的局部最优问题最优解移位的结果,采用滚动时域方式计算出最优估计值,每次滑动一个周期/步长时,移除当前滑动窗内第一个值、并在最后位置加入下一时刻的输入值。
28、进一步的,所述分布式模型预测控制dmpc方法中,构建的中继无人机m的局部最优控制问题为:
29、
30、
31、
32、
33、
34、
35、
36、
37、其中,t为当前时刻,k为时间步长数,m表示当前中继无人机,表示预测的运动状态,表示假定的运动状态,xre为所有中继无人机的状态形成集合,xts为中继无人机通过卡尔曼滤波预测的任务无人机位置,表示预测的控制输入,表示假定的控制输入,dsafe为无人机间的安全距离。
38、与现有技术相比,本发明的优点在于:
39、1、本发明通过根据集群各无人机航路规划结果,分析需要中继的任务无人机位置关系与时刻的序列,判断需要中继无人机的最小数量,然后通过模拟首次接入中继无人机,根据集群网络的性能判断是否需要增加中继节点,最终确定中继无人机数量和接入位置,能够实现面向中继无人机接入部署的全局规划。
40、2、本发明通过获取所有任务无人机的当前位置信息以及历史位置信息进行融合估计,预测出各任务无人机的运动状态,并以全局连接性最优为目标规划各中继无人机的路径,能够实现面向多机协同任务稳定中继通信的中继无人机自主航线规划。
41、3、本发明进一步通过在仅获得接入中继链路的任务无人机位置信息条件下,采用卡尔曼滤波进行运动状态估计,以中继链路建好连接性为目标,结合基于分布式模型预测控制dmpc的方法实现在线规划中继无人机路径,能够进一步提高中继无人机自主航线规划的精度以及灵活性,进一步提高集群网络通信性能。
- 还没有人留言评论。精彩留言会获得点赞!