物流控制系统和方法与流程
1.本公开涉及物流控制的领域,具体地,涉及一种物流控制系统和方法。
背景技术:
2.现有的车间生产中,对于同一个工件,可能存在多个加工工序,需要将该工件转运至多个工位以完成所有加工工序。目前在生产现场,对于工件在不同工位之间的转运,是通过人工进行,但由于人员与信息传递不及时的原因,会导致工件转运滞后,车间物流畅通受阻,影响生产效率。
技术实现要素:
3.为了解决上述问题,本技术提供了一种物流控制系统和方法。
4.第一方面,本技术提供了一种物流控制系统,所述系统包括:多个通讯组件,控制器以及一个或多个机器人,所述多个通讯组件分别与所述控制器和所述一个或多个机器人连接,所述多个通讯组件设置在目标区域的多个位置,所述目标区域表征所述一个或多个机器人的活动区域;所述控制器,用于获取目标工位的工艺信息和运输请求消息,根据所述运输请求消息以及所述通讯组件发送的所述一个或多个机器人的位置信息和机器人状态,从一个或多个机器人中确定目标机器人,并根据所述工艺信息确定调用信息,将所述调用信息发送至所述通讯组件;所述通讯组件,用于获取所述一个或多个机器人的所述位置信息和所述机器人状态,将所述位置信息和所述机器人状态发送至所述控制器,以及接收所述控制器发送的所述调用信息,并将所述调用信息发送至所述目标机器人;所述机器人状态表征所述机器人处于空闲状态或者非空闲状态;所述机器人,用于在接收到所述通讯组件发送的调用信息的情况下,根据所述调用信息转运所述目标工位的待转运物品。
5.可选的,所述控制器,还用于将所述工艺信息的信息格式转化为预设识别格式,所述预设识别格式为所述控制器可识别的信息格式。
6.可选的,所述控制器,用于根据所述运输请求消息,确定所述目标工位的起始位置,获取所述通讯组件发送的所述位置信息和所述机器人状态,根据所述起始位置和所述位置信息,将距离所述起始位置距离最近,且处于空闲状态的机器人,作为所述目标机器人。
7.可选的,所述调用信息包括所述起始位置和指定位置,所述机器人,用于根据所述调用信息将所述待转运物品由起始位置转运至所述指定位置。
8.可选的,所述控制器,还用于将所述目标区域的区域地图信息发送至所述目标机器人;
9.所述机器人,用于根据所述调用信息和所述区域地图信息将所述待转运物品由起始位置转运至所述指定位置。
10.可选的,所述机器人,还用于在接收到所述调用信息的情况下,将所述机器人的机器人状态切换为非空闲状态;或者,在所述待转运物品转运完成情况下,将所述机器人的机
器人状态切换为空闲状态。
11.第二方面,本技术提供了一种物流控制方法,所述方法应用于物流控制系统,所述系统包括:多个通讯组件,控制器以及一个或多个机器人,所述多个通讯组件分别与所述控制器和所述一个或多个机器人连接,所述多个通讯组件设置在目标区域的多个位置,所述目标区域表征所述一个或多个机器人的活动区域;所述方法包括:获取目标工位的工艺信息和运输请求消息,以及所述一个或多个机器人的位置信息和机器人状态;根据所述运输请求消息、所述位置信息和所述机器人状态,从所述一个或多个机器人中确定目标机器人;根据所述工艺信息确定调用信息;通过所述通讯组件将所述调用信息发送至所述目标机器人,所述调用信息用于指示所述机器人根据所述调用信息转运所述目标工位的待转运物品。
12.可选的,所述方法还包括:将所述工艺信息的信息格式转化为预设识别格式,所述预设识别格式表征所述控制器可识别的信息格式。
13.可选的,所述根据所述运输请求消息、所述位置信息和所述机器人状态,从一个或多个机器人中确定目标机器人包括:根据所述运输请求消息,确定所述目标工位的起始位置;根据所述起始位置和所述位置信息,将距离所述起始位置距离最近,且处于空闲状态的机器人,作为所述目标机器人。
14.可选的,所述方法还包括:在接收到所述调用信息的情况下,将所述机器人的机器人状态切换为非空闲状态;或者,在所述待转运物品转运完成情况下,将所述机器人的机器人状态切换为空闲状态。
15.采用上述技术方案,通过所述控制器根据运输请求消息从一个或多个机器人中确定目标机器人,并根据工艺信息确定调用信息,控制所述目标机器人对所述待转运物品进行转运。这样,节省了人力资源消耗,并且保障了待转运物品可以及时转运至下一道工序所在的工位,避免了人工转运带来的待转运物品转运滞后或者转运失误等问题,保障了物流畅通,有利于提高生产效率。
16.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
17.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
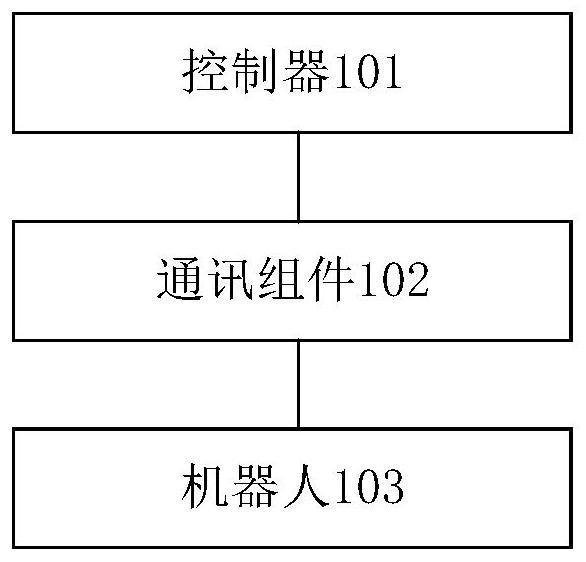
18.图1是本技术根据一示例性实施例示出的一种物流控制系统框图;
19.图2是本技术根据一示例性实施例示出的一种物流控制方法流程图;
20.图3是本技术根据一示例性实施例示出的另一种物流控制方法流程图。
具体实施方式
21.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
22.首先对本技术的应用场景进行说明,本技术应用于物流控制的场景下,在该场景下,现有的物流控制是通过人工传递转运信息,并根据该转运信息进行人工转运,例如,指定工件在目标工位的工序结束之后,由该目标工位的负责人员根据工艺信息确定该指定工
件下一道工序的指定工位,并将该指定工位和该指定工件告知转运人员,由转运人员将该指定工件通过人工运送的方式转运至该指定工位,但由于人员与信息传递不及时的原因,可能会导致零件转运滞后甚至转运失误,物流畅通受阻,影响生产效率。
23.为了解决上述问题,本技术提供了一种物流控制系统和方法,通过该控制器根据运输请求消息从一个或多个机器人中确定目标机器人,并根据工艺信息确定调用信息,控制该目标机器人对该待转运物品进行转运。这样,通过该物流控制系统对待转运物品进行转运,不仅节省了人力资源消耗,并且保障了待转运物品可以及时转运至下一道工序所在的工位,避免了人工转运带来的待转运物品转运滞后或者转运失误等问题,保障了物流畅通,有利于提高生产效率。
24.下面结合具体地实施例对本技术进行说明。
25.图1是本技术根据一示例性实施例示出的一种物流控制系统,如图1所示,该系统包括:控制器101,多个通讯组件102以及一个或多个机器人103,该多个通讯组件102分别与该控制器和该一个或多个机器人103连接,该多个通讯组件102设置在目标区域的多个位置,该目标区域表征该一个或多个机器人103的活动区域;
26.该控制器101,用于获取目标工位的工艺信息和运输请求消息,根据该运输请求消息以及该通讯组件102发送的该一个或多个机器人的位置信息和机器人状态,从一个或多个机器人中确定目标机器人,并根据工艺信息确定调用信息,将该调用信息发送至该通讯组件102;
27.该通讯组件102,用于获取该一个或多个机器人103的该位置信息和该机器人状态,将该位置信息和该机器人状态发送至该控制器101,以及接收该控制器101发送的该调用信息,并将该调用信息发送至该目标机器人;该机器人状态表征该机器人103处于空闲状态或者非空闲状态;
28.该机器人103,用于在接收到该通讯组件发送的调用信息的情况下,根据该调用信息转运该目标工位的待转运物品。
29.其中,在该机器人103处于非空闲状态的情况下,表征该机器人正在转运待转运物品。
30.采用上述系统,通过该控制器根据运输请求消息从一个或多个机器人中确定目标机器人,并根据工艺信息确定调用信息,控制该目标机器人对该待转运物品进行转运。这样,节省了人力资源消耗,并且保障了待转运物品可以及时转运至下一道工序所在的工位,避免了人工转运带来的待转运物品转运滞后或者转运失误等问题,保障了物流畅通,有利于提高生产效率。
31.在一种可能的实现方式中,该控制器101可以与工位连接,可以用于获取该目标工位发送的运输请求消息;且该控制器101可以包括工艺存储模块,用于存储一个或多个工位的工艺信息;在该控制器101接收到目标工位发送的运输请求消息的情况下,通过该运输请求消息,确定该目标工位的工位标识,并根据该工位标识通过该工艺存储模块确定该目标工位的工艺信息。
32.其中,该工位标识可以是该目标工位的工位id,该工艺信息包括该目标工位的工序、工位标识、下一道加工工序以及该目标工位加工工件的数量、规格及材料信息等多种信息;该控制器101,还用于将该工艺信息的信息格式转化为预设识别格式,该预设识别格式
可以为该控制器101可识别的信息格式。这样,通过该工艺信息,保障了该控制器可以控制该目标机器人进行精准转运。
33.该目标工位在完成该待转运物品当前的加工工序后,会向该控制器101发送该运输请求消息。在接收到该运输请求消息的情况下,该控制器101可以根据该运输请求消息,确定起始位置;并获取该通讯组件102发送的该位置信息和该机器人状态,根据该起始位置和该位置信息,将与该起始位置距离最近,且处于空闲状态的机器人103,作为该目标机器人。其中,该运输请求消息可以包括该目标工位的工位位置,或者,该控制器101可以根据该目标工位的工位标识确定该目标工位的工位位置,并将该工位位置确定为该起始位置。
34.该控制器101,还用于获取该目标机器人的标识信息,根据该目标机器人的标识信息,将该调用信息通过该通讯组件102发送至该目标机器人。
35.其中,该标识信息可以是该目标机器人的id,该调用信息可以包括该起始位置和指定位置;该机器人103,用于根据该调用信息将该待转运物品由起始位置转运至该指定位置。
36.在另一种可能的实现方式中,以车间内物流控制为例,由于车间内部存在多个不同的功能区域,该多个不同的功能区域中可能存在限制该机器人103进入的区域,因此,该控制器101,还用于将该目标区域的区域地图信息发送至该目标机器人;该机器人,用于根据该调用信息和该区域地图信息将该待转运物品由起始位置转运至该指定位置。这样,该目标机器人通过该区域地图信息,能够确保转运路径处于预设的可活动范围之内,从而保障该机器人的稳定运行。
37.该机器人103,还用于在接收到该调用信息的情况下,将该机器人103的机器人状态切换为非空闲状态,以确定该机器人不再接收调用信息;或者,在该待转运物品转运完成的情况下,将该机器人103的机器人状态切换为空闲状态。这样,通过切换该机器人状态,以防止该机器人在未转运完成的情况下再次接收调用信息,有利于保障该物流控制系统的稳定。另外,该目标机器人还可以在将待转运物品转运至指定位置的情况下,获取该指定位置对应工位的工艺信息,并向该控制器101反馈该指定位置对应工位的工艺信息,以确保该待转运物品被正确转运。
38.采用上述系统,通过该控制器根据运输请求消息从一个或多个机器人中确定目标机器人,并根据工艺信息确定调用信息,控制该目标机器人对该待转运物品进行转运。这样,节省了人力资源消耗,并且保障了待转运物品可以及时转运至下一道工序所在的工位,避免了人工转运带来的零件转运滞后或者转运失误等问题,保障了物流畅通,有利于提高生产效率。
39.图2是本技术根据一示例性实施例示出的一种物流控制方法,如图2所示,该方法应用于物流控制系统,该系统包括:多个通讯组件,控制器以及一个或多个机器人,该多个通讯组件分别与该控制器和该一个或多个机器人连接,该多个通讯组件设置在目标区域的多个位置,该目标区域表征该一个或多个机器人的活动区域;该方法包括:
40.s201、获取目标工位的工艺信息和运输请求消息,以及该一个或多个机器人的位置信息和机器人状态。
41.其中,该机器人状态表征该机器人处于空闲状态或者非空闲状态,该控制器还将该工艺信息的信息格式转化为预设识别格式,该预设识别格式表征该控制器可识别的信息
格式,该工艺信息包括该目标工位中该待转运物品的工序、工位、下一道加工工序、数量、规格及材料信息。
42.s202、根据该运输请求消息、该位置信息和该机器人状态,从该一个或多个机器人中确定目标机器人。
43.示例地,根据该运输请求消息,确定该目标工位的工位位置,并将该工位位置作为起始位置;根据该起始位置和该位置信息,将与该起始位置距离最近,且处于空闲状态的机器人,作为该目标机器人。
44.s203、根据该工艺信息确定调用信息。
45.其中,该调用信息包括指定位置和该目标工位的起始位置。
46.s204、通过该通讯组件将该调用信息发送至该目标机器人。
47.其中,该调用信息用于指示该机器人根据该调用信息转运该目标工位的待转运物品。
48.示例地,获取该目标机器人的标识信息;根据该标识信息,通过该通讯组件将该调用信息发送至该目标机器人,另外,为了确保该目标机器人的转运路径处于一个或多个机器人的可活动范围之内,该控制器还将目标区域的区域地图信息发送至该目标机器人,以便该目标机器人根据该调用信息和该区域地图信息,通过该目标区域内的范围将该待转运物品由该起始位置转运至该指定位置。
49.另外,在接收到该调用信息的情况下,将该机器人的机器人状态切换为非空闲状态;或者,在该待转运物品转运完成的情况下,将该机器人的机器人状态切换为空闲状态。这样,可以防止该机器人在该未转运完成的情况下再次接收到调用信息,有利于保障该物流控制系统的稳定。
50.采用上述方法,通过该控制器根据该运输请求消息从一个或多个机器人中确定目标机器人,并根据该工艺信息确定调用信息,控制该机器人对该待转运物品进行转运。这样,节省了人力资源消耗,并且保障了待转运物品可以及时转运至下一道工序所在的工位,避免了人工转运带来的零件转运滞后或者转运失误等问题,保障了物流畅通,有利于提高生产效率。
51.图3是本技术根据一示例性实施例示出的另一种物流控制方法,如图3所示,该方法包括:
52.s301、控制器在接收到目标工位的的运输请求消息的情况下,根据该运输请求消息获取该目标工位的工艺信息。
53.其中,该运输请求消息包括该目标工位的工位标识,该控制器根据该工位标识获取工艺信息,并将该工艺信息的信息格式转化为该控制器可识别的预设识别格式。
54.s302、该通讯组件将获取的一个或多个机器人的位置信息和机器人状态发送至控制器。
55.其中,该机器人状态包括空闲状态和非空闲状态,该机器人状态为非空闲状态的情况下,表征该机器人正在转运待转运物品。
56.s303、该控制器根据该运输请求消息、该位置信息和该机器人状态,从一个或多个机器人中确定目标机器人。
57.例如,该控制器可以根据该运输请求消息确定该目标工位的工位位置,并将距离
该工位位置最近的处于空闲状态的机器人确定为目标机器人。
58.s304、该控制器根据该工艺信息确定调用信息。
59.其中,该调用信息可以包括起始位置和指定位置,用于指示该机器人将该待转运物品由该起始位置转运至该指定位置,该起始位置表征该目标工位的工位位置。
60.s305、该控制器通过该通讯组件将该调用信息发送至该目标机器人。
61.s306、该目标机器人在接收到该调用信息的情况下,根据该调用信息转运该目标工位的待转运物品。
62.其中,该目标机器人在接收到该调用信息的情况下,将该目标机器人的机器人状态切换为非空闲状态;并在将待转运物品转运至指定位置的情况下,将该机器人状态切换为空闲状态。
63.采用上述方法,通过该控制器根据该运输请求消息从一个或多个机器人中确定目标机器人,并根据该工艺信息确定调用信息,控制该机器人对该待转运物品进行转运。这样,节省了人力资源消耗,并且保障了待转运物品可以及时转运至下一道工序所在的工位,避免了人工转运带来的零件转运滞后或者转运失误等问题,保障了物流畅通,有利于提高生产效率。
64.在另一示例性实施例中,还提供一种计算机程序产品,该计算机程序产品包含能够由可编程的装置执行的计算机程序,该计算机程序具有当由该可编程的装置执行时用于执行上述的物流控制方法的代码部分。
65.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
66.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
67.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1