一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法
1.本发明属于无人机和自抗扰控制技术领域,具体涉及一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法。
背景技术:
2.多旋翼无人机是一种非常灵活的飞行器,由于具有悬停和垂直起飞降落的特殊优势,在军事侦察、农业测绘、航拍等方面都有着广泛的应用。在过去的数十年里,如何对无人机进行有效控制一直是工业界和学术界研究的热点问题。
3.目前确定的火星探测科学目标主要包括确定火星上是否存在生命、了解火星气候的演变过程和历史及了解火星作为一个地质系统的起源和演化等。即便人类已经用了半个多世纪来探测火星、研究宇宙,但就目前的探测水平来看,还远远达不到对火星探测清晰明了的程度。
4.火星表面飞行条件恶劣、流场变化剧烈等特点对无人机性能指标要求苛刻,为保证火星无人机完成火星探测任务,亟需解决无人机无gps条件下的飞行控制与导航以及无人机的系统集成等技术难题。在旋翼式火星无人机的飞行控制中,稀薄的火星大气会导致无人机旋翼升力随旋翼转速变化的幅度远小于在地球环境的变化幅度,因而火星无人机的飞行姿态调整过程会非常迟缓。然而火星风、尘暴等现象会严重影响火星无人机飞行的稳定性,这就要求火星无人机针对环境的变化能够做出快速调整以保证无人机的飞行安全。目前旋翼式火星无人机的控制主要是通过调整翼端路径平面(tip path plane,tpp)与无人机质心的相对位置,来实现火星无人机的转向控制与姿态调整。
5.特别是四旋翼飞行器因其具有体积小、机械设计简单、飞行操作便捷等特点更是受到了多个行业的广泛关注。然而,四旋翼飞行器是一个具有强耦合和欠驱动特性的非线性系统,它具有六个自由度,但仅具有四个控制输入;同时由于其体积和重量较小,导致阵风等外部干扰对它产生的影响较大。因此,设计一种针对四旋翼系统稳定姿态的可靠控制策略是一项颇具挑战的工作。
技术实现要素:
6.有鉴于此,本发明提供了一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法,实现了在模拟的火星阵风强干扰环境下对四旋翼飞行器的姿态控制。
7.本发明提供的一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法,包括以下步骤:
8.步骤1、建立四旋翼飞行器的姿态动力学模型;
9.步骤2、构建外环控制器和内环控制器,其中,外环控制器包括外环非线性扩张状态观测器和外环非线性控制器,内环控制器包括内环非线性扩张状态观测器和内环非线性控制器;
10.步骤3、实际控制中,外环非线性扩张状态观测器以外环非线性控制器输出的角速
度期望值和四旋翼飞行器输出的角度反馈值为输入,计算得到输出的状态估计值外环非线性控制器以直接输入的期望角度、四旋翼飞行器输出的角度以及状态估计值为输入,计算得到角速度期望值vj作为输出;内环非线性扩张状态观测器以四旋翼飞行器输出的角速度反馈值和内环非线性控制器输出的控制量为输入,计算得到输出的状态估计值内环线性控制器以外环控制器输出的角速度期望值、四旋翼飞行器输出的角速度反馈值及内环非线性扩张状态观测器输出的状态估计值为输入,计算得到输出的四旋翼飞行器的控制量ui;将控制量ui输入到四旋翼飞行器的姿态动力学模型中实现对四旋翼飞行器的控制。
11.进一步地,所述步骤2中的外环非线性扩张状态观测器的构造形式如下所示:
[0012][0013]
其中,y1=η=[φ,θ,ψ]
t
=[y
1j
]3×1∈r3×1,j=φ,θ,ψ和y2=[y
2j
]3×1∈r3×1,j=φ,θ,ψ分别表示外部扰动值,φ为四旋翼飞行器的俯仰角,θ为四旋翼飞行器的滚转角,ψ为四旋翼飞行器的偏航角,和分别表示y1和y2所对应的状态估计值,vj表示外环非线性控制器的输出值,为状态估计值的一阶导数值,为状态估计值的一阶导数值,β
1j
和ε
1j
均为正的可调节的常数,为非线性函数其表达式为:
[0014][0015]
其中,σ为正的可调节常数。
[0016]
进一步地,所述外环非线性控制器的构造形式如下所示:
[0017][0018]
其中,e
η
=η-ηd=[e
ηj
]3×1∈r3×1,j=φ,θ,ψ为俯仰角、滚转角和偏航角的误差值;k
0j
,k
1j
,k
2j
均为正常数;为可调整的正常数;vj为外环非线性控制器输出的角速度期望值。
[0019]
进一步地,所述内环非线性扩张状态观测器的构造形式如下所示:
[0020][0021]
其中,α
1i
、α
2i
和ε
0i
均为非负常数,为非线性函数,和分别为x
1i
和x
2i
两个状态的估计值,bi为各通道转动惯量的倒数,p,q,r为四旋翼飞行器在机体坐标系下的角速
度。
[0022]
进一步地,所述内环非线性控制器的构造形式如下所示:
[0023][0024]
其中,e
ω
=ω-ωr=[e
ωi
]3×1∈r3×1为三个通道角速度的误差值,k
pi
,k
di
,k
ni
分别为比例项、微分项和非线性项的正常数,为各通道转动惯量的倒数,为非线性函数。
[0025]
有益效果:
[0026]
本发明通过构建四旋翼飞行器的姿态动力学模型,分析其内在特征,在此基础上设计双环自抗扰非线性控制器,通过内外环的扩张状态观测器,对外部扰动进行补偿,实现四旋翼飞行器对设定好的期望姿态角的精确跟踪,从而完成对四旋翼飞行器姿态的控制。
附图说明
[0027]
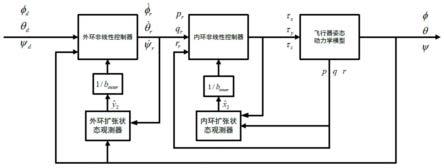
图1为本发明提供的一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法的控制示意图。
具体实施方式
[0028]
下面结合附图并举实施例,对本发明进行详细描述。
[0029]
自抗扰控制技术具有处理系统内部的未知动态和外部扰动等广泛问题的能力,已经成为控制工程中的一项新兴技术。自抗扰控制器由跟踪微分器、扩张状态观测器和非线性控制律组成,其中,扩张状态观测器是整个控制器中最重要的部分,它通过系统的输出估计系统的状态。因此,在模拟火星的强阵风干扰情况下,将自抗扰控制技术应用于四旋翼姿态系统中,将有助于抵抗外部具有不确定性的干扰对四旋翼飞行器飞行效果的影响,从而实现无人机的稳定飞行。
[0030]
基于上述考虑,本发明提供了一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法,其核心思想是:首先将期望的姿态角输入四旋翼飞行器,然后通过外环角度控制器对三个姿态角的误差分别进行控制计算,并通过外环非线性扩张状态观测器对角度的扰动进行补偿,从而解算出期望的角速度;进一步将得到的期望角速度以及从系统得到的角速度反馈值输入到内环角速度控制器中,通过内环自抗扰控制器对飞行器进行角速度的控制,并通过内环非线性扩张状态观测器对角度的扰动进行补偿,从而得到需要输入到飞行器的三个扭矩力,通过三个通道的扭矩分别控制飞行器系统的俯仰角、滚转角和偏航角,并将得到的输出值反馈给控制器,从而实现飞行器整个系统的闭环姿态控制。
[0031]
由此可见,与现有技术中仅在飞行器姿态控制的内环采用自抗扰控制的算法不同,本发明增加了外环自抗扰控制器和外环非线性状态观测器,以应对火星背景下强阵风强干扰的情况。
[0032]
本发明提供的一种火星阵风强干扰环境下四旋翼飞行器的姿态控制方法,如图1所示,具体包括以下步骤:
[0033]
步骤1、建立四旋翼飞行器的姿态动力学模型。
[0034]
采用现有的四旋翼飞行器姿态动力学模型,模型表示如下:
[0035][0036][0037]
其中,ω=[p,q,r]
t
∈r3为飞行器在机体坐标系下的角速度,η=[φ,θ,ψ]
t
∈r3为飞行器在惯性坐标系下的欧拉角,φ为飞行器的俯仰角、θ为飞行器的滚转角和ψ为飞行器的偏航角,w-1
为旋转矩阵如下所示:
[0038][0039]
τ为飞行器的输入(扭矩)如下所示:
[0040][0041]
其中,k1为推力因子,k2为拉力因子,ωi为第i个电机的角速度,i为正整数,l1和l2分别表示转子到x和y轴的距离。
[0042]
步骤2、构建外环控制器和内环控制器,其中,外环控制器包括外环非线性扩张状态观测器和外环非线性控制器,内环控制器包括内环非线性扩张状态观测器和内环非线性控制器。
[0043]
与现有线性状态观测器的构造形式不同,在线性的基础上,本发明对两个状态估计值的计算都增加了非线性项,通过调整非线性函数的参数σ实现更好的抗扰动效果。本发明构建的外环非线性扩张状态观测器的构造形式如下:
[0044][0045]
其中,y1=η=[φ,θ,ψ]
t
=[y
1j
]3×1∈r3×1,j=φ,θ,ψ和y2=[y
2j
]3×1∈r3×1,j=φ,θ,ψ分别表示外部扰动值,和分别表示y1和y2所对应的状态估计值,vj表示外环控制器的输出值,为状态估计值的一阶导数值,为状态估计值的一阶导数值,β
1j
和ε
1j
均为正的可调节的常数,为非线性函数其表达式为:
[0046][0047]
其中,σ为正的可调节常数,通过调整σ的值,来提高整个系统的对期望姿态角的跟踪效果。
[0048]
与现有线性自抗扰控制器不同,外环控制器在线性pi控制器和状态反馈量的基础上,为了使得误差值在有限的时间内趋于0,进一步增加了非线性控制律,同时pi控制率和
非线性控制率相辅相成,一方面具有很好的抗扰动效果,另一方面加速了收敛。本发明构建的外环非线性控制器的构造形式如下:
[0049][0050]
其中,e
η
=η-ηd=[e
ηj
]3×1∈r3×1,j=φ,θ,ψ,表示俯仰角、滚转角和偏航角的误差值;k
0j
,k
1j
,k
2j
为正常数;为可调整的正常数;vj为外环非线性控制器的输出,即为角速度的期望值,也是内环控制器的输入值。
[0051]
此外,四旋翼飞行器的姿态动力学模型还可以表示为如下形式:
[0052][0053]
进一步转化为状态空间表达式为:
[0054][0055][0056]
其中,x1(t)=ω,x2(t)=f(t),且是有界的。
[0057]
在此基础上,本发明针对三个通道的表示方法进行了以下改进,将姿态动力学模型表示为:
[0058][0059]
在此基础上,本发明构建的内环非线性扩张状态观测器的构造形式如下所示:
[0060][0061]
其中,α
1i
、α
2i
和ε
0i
均为非负常数,为非线性函数,和分别为x
1i
和x
2i
两个状态的估计值,bi为各通道转动惯量的倒数。同时,作为内环扰动补偿项输入到内环非线性控制器中。
[0062]
本发明构建的内环非线性控制器,是在pi控制律和状态反馈量的基础上增加了以非线性函数为控制率的非线性项,从而使控制器具有更好地适应能力和鲁棒性,其中,控制率表示如下:
[0063][0064]
其中,e
ω
=ω-ωr=[e
ωi
]3×1∈r3×1为三个通道角速度的误差值,k
pi
,k
di
,k
ni
分别为比例项、微分项和非线性项的正常数,为各通道转动惯量的倒数,ui为四旋翼飞行器控制量。
[0065]
步骤3、实际控制中,外环非线性扩张状态观测器以外环非线性控制器输出的期望角速度值和四旋翼飞行器输出的角度反馈值为输入,计算得到输出的状态估计值外环
非线性控制器以直接输入的期望角度、四旋翼飞行器输出的角度以及状态估计值为输入,计算得到输出的角速度的期望值vi;内环非线性扩张状态观测器以四旋翼飞行器输出的角速度反馈值和内环非线性控制器输出的角加速度值为输入,计算得到输出的状态估计值内环线性控制器以外环控制器输出的角速度期望值、四旋翼飞行器输出的角速度反馈值及内环非线性扩张状态观测器输出的状态估计值为输入,计算得到输出的四旋翼飞行器的控制量ui;将控制量ui输入到四旋翼飞行器的姿态动力学模型中实现对四旋翼飞行器的控制。
[0066]
其中,在实际控制中四旋翼飞行器等效为飞行器姿态动力学系统。
[0067]
在上述飞行器架构中,在内外环的控制下,相比于一般的自抗扰控制器,本发明中的双环自抗扰控制器可以使得飞行器具有更好地抗干扰能力,同时也可以使得误差值更快速的收敛,从而使飞行器系统快速准确地达到期望的姿态角,实现飞行器在强干扰环境下的有效姿态控制。
[0068]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1