一种面向5G电力巡检无人机的协同路径规划方法及系统与流程
本技术属于电网无人机智能运检领域,具体涉及一种面向5g电力巡检无人机的协同路径规划方法及系统。
背景技术:
1、输电杆塔作为输电网络的支柱,长期暴露于野外环境中,需对其定期进行检修。传统电力巡检采用人工巡检方式,这种模式存在巡检工作强度大、效率低、效果差等缺点,并且对于检修人员的需求量较大,面临的问题也日益突出。近年来,由于无人机技术的快速发展,无人机巡检因其灵活性强、操作难度低、巡检效率较高等优势逐渐代替人工巡检,并在电力巡检任务中发挥了重要作用。
2、随着巡检任务的复杂程度逐渐提高,在应对大范围电力系统巡检任务时,由于电力杆塔的数量较多,杆塔间距离较远,单架无人机无法较好完成整个系统的巡检任务,因此采用多无人机同时进行巡检的方式,可有效提高巡检的效率。由于在巡检过程中无人机需要实时传输图像数据,分析故障点,因此巡检过程中对通信信号的质量有着较高要求。而5g技术的发展,为电力巡检无人机提供了重要的通信保障。
3、在实现无人机自主巡检任务过程中,多无人机航迹规划是十分重要的研究内容,许多的学者对此提出了解决方案。罗隆福等在rrt(rapidly exploring random trees)算法的基础上,提出了一种改进算法,通过继承rrt在xy平面搜索的随机性,而在z轴高度上对搜索过程进行约束,使得路径最终逐渐逼近目标点(参见引证文件1)。李晓辉等在alns(adaptive largeneighborhood search)算法的框架下加入vnd(variable neighborhooddescent)为下属策略,提出了一种新的混合式元启发式算法(参见引证文件2)。通过在大邻域搜索算法中加入自适应机制,根据破坏算子和修复算子的作用效果,动态调整权重并选择不同的搜索算子来寻找更优解。苗东东等提出了一种基于人工势场的航迹规划方法,其通过在无人机理想路径投影点上设置引力场,实现无人机的避障与路径规划(参见引证文件3)。马瑞等结合多智能体强化学习理论,提出了一种基于qmix的多无人机大规模电力巡检任务分配算法,每架无人机根据自身对环境观测进行动作选择,实现了多无人机协作快速巡检(参见引证文件4)。
4、可以看出,目前大部分研究集中于无人机路径规划方法,而对其规划路径通信信号质量未曾考虑。针对于此,为了保障无人机电力巡检过程中的通信质量,本发明在多无人机航迹规划过程中引入了5g信号质量,将其与飞行总路程、杆塔位置共同作为约束条件规划无人机路径。该方法对于多无人机电力巡检实施具有较好参考意义。
5、引证文件列表:
6、1、罗隆福,李冬,钟杭.基于改进rrt的无人机电力杆塔巡检路径规划[j].湖南大学学报(自然科学版),2018,45(10):80-86.
7、2、李晓辉,张路,刘传水,赵毅,董媛.电力巡检中的无人机群路径规划算法[j].计算机系统应用,2022,31(03):241-247.
8、3、苗东东,吕品,王庆,徐海明.基于改进人工势场法电力巡检无人机航迹规划[j].计算机与数字工程,2021,49(11):2260-2265.
9、4、马瑞,欧阳权,吴兆香,丛玉华,王志胜.基于深度强化学习的多无人机电力巡检任务规划[j].计算机与现代化,2022(01):98-102.
技术实现思路
1、本发明针对现有技术中的不足,提供一种面向5g电力巡检无人机的协同路径规划方法,并提出了相应的系统、存储介质及电子设备。
2、为实现上述目的,本发明采用以下技术方案:
3、一种面向5g电力巡检无人机的协同路径规划方法,其特征在于,包括:
4、建立电力巡检场景下的5g信号质量分布模型,基于所述5g信号质量分布模型,计算出每个杆塔处的路径损耗值;
5、根据每个杆塔处的路径损耗值,结合信号的最大路径损耗值,计算得到当前杆塔处的信号质量;
6、将5g信号约束加入无人机路径规划算法中,所述无人机路径规划算法采用将信号质量与无人机的总飞行路程作为适应度函数的遗传算法;
7、采用无人机路径规划算法进行最优求解,获得电力巡检的最优路径。
8、为优化上述技术方案,采取的具体措施还包括:
9、进一步地,所述5g信号质量分布模型具体如下:
10、考虑电力杆塔的分布情况,对5g信号基站信道传播模型的覆盖性能进行表征:
11、视距概率计算公式如下:
12、
13、其中,
14、
15、式中,prlos表示视距概率,d2d-out表示杆塔与用户端在室外的平面距离,hut表示用户的高度;
16、视距传播过程中的损耗计算公式如下:
17、
18、其中,
19、pl1=28.0+22log10(d3d)+20log10(fc)
20、pl2=28.0+40log10(d3d)+20log10(fc)-9log10(((d′bp)2+(hbs-hut)2)
21、
22、式中,pluma-los表示视距传播过程中的大尺度空间损耗值,hbs为杆塔的高度,hut为无人机的飞行高度,d2d为杆塔与无人机的平面距离,d3d为杆塔与无人机的三维距离,d′bp为断点距离,fc为信号频率;
23、非视距传播过程中的损耗计算公式如下:
24、pluma-nlos=max(pluma-los,pl′uma-nlos)
25、pl′uma-nlos=13.54+39.08log10(d3d)+20log10(fc)-0.6(hut-1.5)
26、式中,pluma-nlos表示非视距传播过程中的大尺度空间损耗值;
27、信号的最大允许路径损耗根据链路预算进行测算,其计算公式如下:
28、plmax=ptx-lf+gtx-mf-mi+grx-sr
29、式中,plmax表示信号的最大允许路径损耗值,ptx为基站发射功率,lf为馈线损耗,gtx为基站天线增益,mf为阴影衰落和衰落余量,mi为干扰余量,grx为接收端天线增益,sr为接收端灵敏度。
30、进一步地,所述每个杆塔处的路径损耗值包括视距传播过程中的大尺度空间损耗值pluma-los和非视距传播过程中的大尺度空间损耗值pluma-nlos。
31、进一步地,所述当前杆塔处的信号质量如下:
32、pathloss=[(prlos·pluma-los)+(prnlos·pluma-nlos)]/plmax
33、式中,pathloss表示信号质量,prlos表示视距概率,pluma-los表示视距传播过程中的大尺度空间损耗值,prnlos表示非视距概率,pluma-nlos表示非视距传播过程中的大尺度空间损耗值,plmax表示信号的最大允许路径损耗值。
34、进一步地,所述无人机路径规划算法的适应度函数如下:
35、
36、式中,stotal表示总适应度函数,nsalesmen表示无人机数目,n表示总巡检杆塔数目,sijk表示第i架无人机从第j个杆塔飞往第k个杆塔的距离,pathlossijk表示第i架无人机从第j个杆塔飞往第k个杆塔的信号质量。
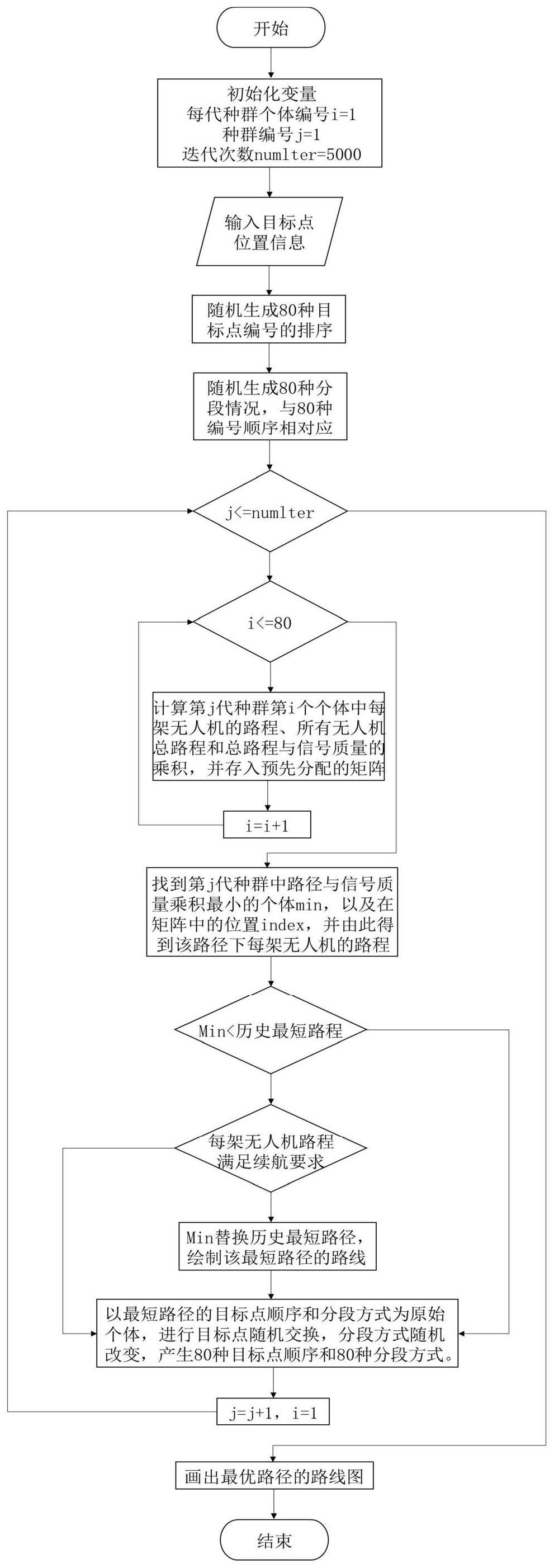
37、进一步地,所述采用无人机路径规划算法进行最优求解,获得电力巡检的最优路径,具体包括以下步骤:
38、1)已知有n个目标点,对目标点进行编号,将1到n的编号随机打乱m-1次,与未打乱之前的顺序共形成m组编号数据一同存入矩阵;有nsalesmen架无人机执行巡检任务,采用nsalesmen-1个断点将矩阵中每组编号数据分为nsalesmen段,共随机生成m组断点并存入矩阵;每组编号数据在断点处分段,每段分配给一架无人机,并按照顺序进行巡检,共得到m种路径作为初始种群;
39、2)计算离基站某距离处的信号衰减值,并与信号的最大允许路径损耗值相除,得到信号衰减程度作为适应度函数的权重;同时,计算该代中每架无人机的路程,用于判断无人机是否满足续航时间约束;
40、3)在满足无人机续航要求的情况下,选择并存储每代种群中的总路程与信号质量的乘积最小值的信息,包括该路径的所有无人机飞行总距离、对应的每架无人机巡检的杆塔编号顺序和断点信息;
41、4)通过随机交换父代的目标点顺序和随机改变断点信息的操作模拟遗传中的交叉和变异操作,从而产生下一代种群的m种路径;
42、5)循环步骤2)到4),直到满足迭代次数后,输出最短路径作为最优路径。
43、进一步地,步骤2)中,所述续航时间约束通过下式计算:
44、endurance=(2·height+duavmax-(num+1)·(αccex+slowdownx))/vsalesmen+(num+1)·2·slowdownt+π/wsalesmen·(num-1)
45、式中,endurance为无人机续航时间,height为飞行高度,duavmax为单个无人机最长飞行距离,num表示巡检杆塔数目,accex表示加速距离,slowdownx表示减速距离,vsalesmen表示飞行速度,slowdownt表示减速时间,wsalesmen表示巡检时的角速度。
46、本发明还提出了一种面向5g电力巡检无人机的协同路径规划系统,包括:
47、路径损耗计算模块,用于建立电力巡检场景下的5g信号质量分布模型,基于所述5g信号质量分布模型,计算出每个杆塔处的路径损耗值;
48、信号质量计算模块,用于根据每个杆塔处的路径损耗值,结合信号的最大路径损耗值,计算得到当前杆塔处的信号质量;
49、路径规划模块,用于将5g信号约束加入无人机路径规划算法中,所述无人机路径规划算法采用将信号质量与无人机的总飞行路程作为适应度函数的遗传算法;
50、输出模块,用于采用无人机路径规划算法进行最优求解,获得电力巡检的最优路径。
51、本发明还提出了一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序使计算机执行如上所述的面向5g电力巡检无人机的协同路径规划方法。
52、本发明还提出了一种电子设备,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行计算机程序时,实现如上所述的面向5g电力巡检无人机的协同路径规划方法。
53、本发明的有益效果是:本发明针对多无人机巡检电力杆塔的场景,基于遗传算法,在多无人机航迹规划过程中引入了5g信号约束,将其与飞行总路程、杆塔位置共同作为约束条件规划无人机路径。通过仿真结果表明,约束前后信号质量较差路径的长度有着明显差别,增加约束后的路径中,无人机会在距离相差较小的情况下优先巡检信号较强的杆塔,优化了整体巡检效果,进一步提高了巡检质量。
- 还没有人留言评论。精彩留言会获得点赞!