一种展览馆划线机器人系统及划线方法与流程
本发明属于展览馆展位图的地坪划线,同时,本发明还涉及一种展览馆划线机器人系统及划线方法。
背景技术:
1、现在展览行业的展会举办过程中,都需要在展会搭建之前,于预定的展馆内在地面上画出本次展览的展位图,供搭建商按地面标记进场寻找预定位置进行展位搭建。现在的划线过程基本都是由人工完成,划线工作要求准确度高,施工周期短,现有人工操作方式精度较低,发生错误会导致施工周期延长,人工划线效率低且这种工作无法通过增加人工数量来缩短划线周期。在展览业中展厅的使用时间等同于经济价值,所以优化划线工序节约划线时间就是创造经济价值。因此我们提出一种展览馆划线机器人系统及划线方法。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,实现提供了一种简单、高效、高精度、低成本的展厅划线装置和划线方法,首次引入划线机器人应用于展厅划线工作,改变了以往只能依赖人力进行划线的低效率、低精度的状态,最主要的是缩短了划线时间,缩短划线时间等同于增加了展览馆的可租用时间,相当于增加了展览馆的租赁收入,扩大了展览馆的接展能力,让更多的展览会可以获得档期,变相促进了展览业的繁荣。
2、为实现上述目的,本发明提供如下技术方案:一种展览馆划线机器人系统,包括管理系统平台和划线机器人,所述划线机器人包括车辆本体、划线装置、通信终端、定位装置、感知装置、车载数据处理终端,所述管理系统平台用于生成并记录展览馆坐标地图,处理展览馆展位图数据、接收划线机器人的坐标、制定划线机器人的运行规则、下发运行指令给划线机器人、协调多个划线机器人协同完成划线工作;
3、所述车辆本体为四轮小车,可以按设定方向和坐标行驶,所述划线装置安装在车辆本体的底部,根据车载数据处理终端的指令,保持在触地划线状态或悬空状态;
4、所述通信终端采用无线通信手段与管理系统平台进行实时数据通信,通信内容包括行进方向、当前坐标、划线装置状态、云台倾斜数据、平台下发的控制命令、展位坐标地图、周围障碍物信息、车辆状态信息;
5、所述定位装置包括测距传感器、水平云台和电子指南针,所述感知装置安装在车辆本体的四个角上,采用近距离测距传感器感知周围物体,将测距结果传递给车载数据处理终端,经过运算判断是否有物体阻挡,实现及时避让障碍物;
6、所述车载数据处理终端完成车辆的数据处理、控制车辆的行驶状态、控制所有模块的工作状态、收集加工车辆的所有参数,并通过通信终端发送给后端的管理系统平台,并接收管理系统平台下达的控制指令,解析指令,根据指令控制车辆的行驶状态、划线装置的工作状态。
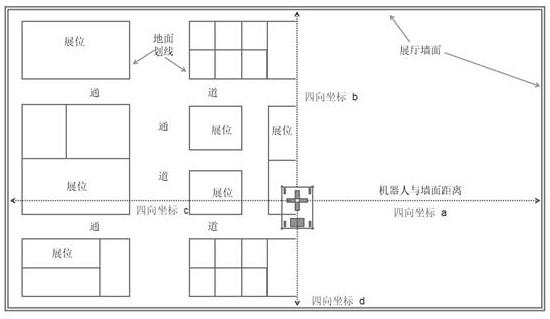
7、优选的,所述测距传感器向四面墙壁进行距离测量,得出的四个方向的距离便是所在位置的四向坐标,所述测距传感器采用非接触式测距传感器;
8、所述水平云台用来支撑四个测距传感器、使四个测距传感器保持在水平状态上;
9、所述电子指南针用来获取车辆的朝向数据,此方向数据结合四向坐标共同确定每个点的位置,并将位置坐标数据发送给车载数据处理终端。
10、优选的,所述四向坐标的标定并不需要四个坐标值都符合展厅坐标底图数值才能定位坐标点,结合方向角数据和轨迹数据,只要任意两组坐标值满足即可确定点位,两组坐标值互相作为校验,提高系统的鲁棒性,增加容错能力,能够适应更复杂的环境。
11、优选的,所述感知装置对车辆的前后进行障碍物探测,通过探测结果判断是否需要避让或者绕行。
12、优选的,所述车辆本体为电动力车辆,其内部包含蓄电池供电系统、电动机动力系统和车辆控制系统。
13、优选的,所述划线机器人中的车辆本体行驶时是严格的前向行进,所述电子指南针与车辆的前进方向存在预设关系。
14、优选的,所述划线装置包括电子控制模块、划线机械系统、划线涂料存储容器、接触式划线笔,划线时车载数据处理终端根据管理系统平台下发的数据,判断当所处坐标与下发展位图坐标重合时,命令电子控制模块控制划线机械系统下降,使接触式划线笔接触地面,涂料从存储容器中经由划线笔在地面上留下划线印记。
15、本发明还提供了一种展览馆划线机器人划线方法,包括如下步骤:
16、s1、首先针对每个独立的展厅进行地图绘制,用机器人在展厅内进行横向和纵向的行驶,形成全展厅的坐标数据地图;
17、s2、在每个展厅设置一个固定的起始点,每个展厅的机器人工作起始点必须从预先设定的起始点按预先设定的固定方向开始,用运行轨迹可以区分相同坐标的点位避免机器人在展厅内迷路,起始点的选定必须是没有相同四向坐标数据的点位;
18、s3、将展厅的展位图进行数据解析,将展位图映射到s1绘制的全展厅坐标数据地图上,形成四向坐标展位图,在图中提取出坐标点位和每个线条相对于起始点选定方向的角度数据;
19、s4、将坐标展位图经由管理系统平台下发给划线机器人,当由多台机器人协作完成时,对划线工作进行分解,并分别下发给每个机器人;
20、s5、机器人从展厅的固定起始点按固定方向启动,多个机器人需依次从固定起始点启动,按照分工进行划线工作,实时用四向坐标数据对比导入的坐标展位图坐标数据,控制划线装置处于触地划线状态,按横向纵向运行划线,最终形成按展位图规划的展位标记;
21、s6、划线机器人按横向和纵向往返运行,并将行进的坐标和方向数据发送到管理系统平台,平台会实时记录划线的进度,校验划线的准确性,实时监控划线的状态,实时调整划线策略,协调多个机器人相互协作,规划路线躲避避免相撞;
22、s7、完成划线所有机器人返回起始点。
23、本发明的技术效果和优点:
24、本发明提供了一种简单、高效、高精度、低成本的展厅划线装置和划线方法,首次引入划线机器人应用于展厅划线工作,改变了以往只能依赖人力进行划线的低效率、低精度的状态,最主要的是缩短了划线时间,缩短划线时间等同于增加了展览馆的可租用时间,相当于增加了展览馆的租赁收入,扩大了展览馆的接展能力,让更多的展览会可以获得档期,变相促进了展览业的繁荣。
技术特征:
1.一种展览馆划线机器人系统,其特征在于,包括管理系统平台和划线机器人,所述划线机器人包括车辆本体、划线装置、通信终端、定位装置、感知装置、车载数据处理终端,所述管理系统平台用于生成并记录展览馆坐标地图,处理展览馆展位图数据、接收划线机器人的坐标、制定划线机器人的运行规则、下发运行指令给划线机器人、协调多个划线机器人协同完成划线工作;
2.根据权利要求1所述的一种展览馆划线机器人系统,其特征在于:所述测距传感器向四面墙壁进行距离测量,得出的四个方向的距离便是所在位置的四向坐标,所述测距传感器采用非接触式测距传感器;
3.根据权利要求2所述的一种展览馆划线机器人系统,其特征在于:所述四向坐标的标定并不需要四个坐标值都符合展厅坐标底图数值才能定位坐标点,结合方向角数据和轨迹数据,只要任意两组坐标值满足即可确定点位,两组坐标值互相作为校验,提高系统的鲁棒性,增加容错能力,能够适应更复杂的环境。
4.根据权利要求1所述的一种展览馆划线机器人系统,其特征在于:所述感知装置对车辆的前后进行障碍物探测,通过探测结果判断是否需要避让或者绕行。
5.根据权利要求1所述的一种展览馆划线机器人系统,其特征在于:所述车辆本体为电动力车辆,其内部包含蓄电池供电系统、电动机动力系统和车辆控制系统。
6.根据权利要求1所述的一种展览馆划线机器人系统,其特征在于:所述划线机器人中的车辆本体行驶时是严格的前向行进,所述电子指南针与车辆的前进方向存在预设关系。
7.根据权利要求1所述的一种展览馆划线机器人系统,其特征在于:所述划线装置包括电子控制模块、划线机械系统、划线涂料存储容器、接触式划线笔,划线时车载数据处理终端根据管理系统平台下发的数据,判断当所处坐标与下发展位图坐标重合时,命令电子控制模块控制划线机械系统下降,使接触式划线笔接触地面,涂料从存储容器中经由划线笔在地面上留下划线印记。
8.一种展览馆划线机器人划线方法,基于权利要求1-7任意一项所述的一种展览馆划线机器人系统,其特征在于,包括如下步骤:
技术总结
本发明公开了一种展览馆划线机器人系统,包括管理系统平台和划线机器人,本发明还提供了一种展览馆划线机器人划线方法,包括如下步骤:S1、首先针对每个独立的展厅进行地图绘制,S2、在每个展厅设置一个固定的起始点,S3、展位图进行数据解析,S4、将坐标展位图经由管理系统平台下发给划线机器人,S5、机器人从展厅的固定起始点按固定方向启动,S6、划线机器人按横向和纵向往返运行,S7、完成划线所有机器人返回起始点,本发明缩短了划线时间,缩短划线时间等同于增加了展览馆的可租用时间,相当于增加了展览馆的租赁收入,扩大了展览馆的接展能力,让更多的展览会可以获得档期,变相促进了展览业的繁荣。
技术研发人员:王艳辉
受保护的技术使用者:王艳辉
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!