边缘处理装置、数字化工厂及数字化工厂设备控制方法与流程
本发明涉及数字化设备控制领域,特别涉及一种边缘处理装置、数字化工厂及数字化工厂设备控制方法。
背景技术:
1、现有互联网之以太网,数据始于人机互动设备,数据的发生离不开人的感知器官,例如智能手机触摸屏,人眼的观察,人手指的触摸传感输入信息。
2、而数字化工厂生产线中,是以大量工业传感器来实现类似于人眼那样的感知功能,对于机器设备与器件设备的感知与信息数据传递。这种对工业设备的感知,就是工业传感器。这些工业传感器如同人的双眼视觉、双耳听觉和十个手指触摸触觉。并且就如同人的双眼同步协调工作,从单眼平面成像,通过双眼距离与夹角的同步视觉感知,实现从双眼双平面到感知,大脑神经的处理为成像立体化感知。
3、这对于数字化工厂生产线所需要的智能化过程自动化管理,就需要增加很多的工业传感器,如同人的双眼协同工作那样,需要两个以上的工业传感器的同步融合计算那样,在工厂生产中需要增加很多机械运动位置感知的传感器,并且实现实时联网融合计算的实现对工业现场工业机械运动设备更上一层的智能感知功能与实时控制,以满足数字化工厂智能化生产加工与生产设备管理的需求。这些大量增加的工业级机械位置传感器的数字信号,例如绝对值多圈编码器的数字信号,以现有技术以工业以太网连接传输为较佳,传输到达上位控制器。
4、这种在底层机械通过传感器就可实现现场感知,并根据现场工艺的多传感器融合计算的信息预处理装置,称为“边缘处理器”。边缘处理器可以通过工业以太网的方式连接到更上一层的上位机控制器。
5、现有的多个机械运动的同步控制,主要是用伺服电机作为多电机同步控制,存在以下的问题:
6、1,反馈传感器是安装在电机转子尾部的旋转编码器,反馈信号要经过电机驱动器装置,而驱动器装置同时也要接收上位同步控制器的指令信号,对于同步控制的传感器反馈与同步控制的指令信息是在一条线上,轮流排队上传下达,指令信号与反馈信号的路线节点没有分开;
7、2,多个电机驱动的反馈与指令信号在同一信号线上,每个节点按地址分配的轮流排队串行,上传下达的传输信息,每个信号间隔时间的延时不确定性,相互各个电机的运动控制时钟不在同一个点上。
8、3,伺服电机转子后安装的伺服编码器,仅仅感知的是电机转子位置,而对于传动机械后的机械末端是按传动比例推算的,在机械上精度损失,在时间上传递间隙与弹性的过程延时损失,由于绝对值多圈编码器相对体积较大,目前大部分伺服电机没有安装全行程位置绝对值的绝对值多圈编码器。并且,由于伺服编码器是安装在电机转子尾部,各个电机的机械运动末端位置的统一零点对齐,需要经过传动的减速装置传动比系数计算,统一对准机械零位很麻烦。
9、而工业以太网的常用模式面临如下困难,
10、第一,每一个传感器需要一个自己设备的地址,并且按地址在时域上轮流排队上传数据信号。这将大大占用公用线上资源、线上节点地址数、线上传输时间占用、线上冲突概率增大。这样多传感器实时同步的数据采集难以实现。由于可能处理冲突纠错而每个传感器数据延迟时间的不确定性,将无法实现同步实时控制。
11、第二,假如需要两个以上现场工业传感器在上位机上的融合计算,实现智能化感知与智能化管理,需要在主控设备控制器上先逐个采集传感器数据并校验确认,然后再多传感器融合计算,这样的延迟时间很不确定,是无法实现所有机械位置的绝对零点对齐、运动时钟同步,也无法实现同步实时控制。
12、第三,每一个传感器的信号未经自检、校验与优化处理,信息到达控制器后,控制器需对每一个上传的传感器的信号再进行处理与逻辑运算判断,对于控制器的资源占用庞大。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中的上述缺陷,提供一种边缘处理装置、数字化工厂及数字化工厂设备控制方法。
2、本发明是通过下述技术方案来解决上述技术问题:
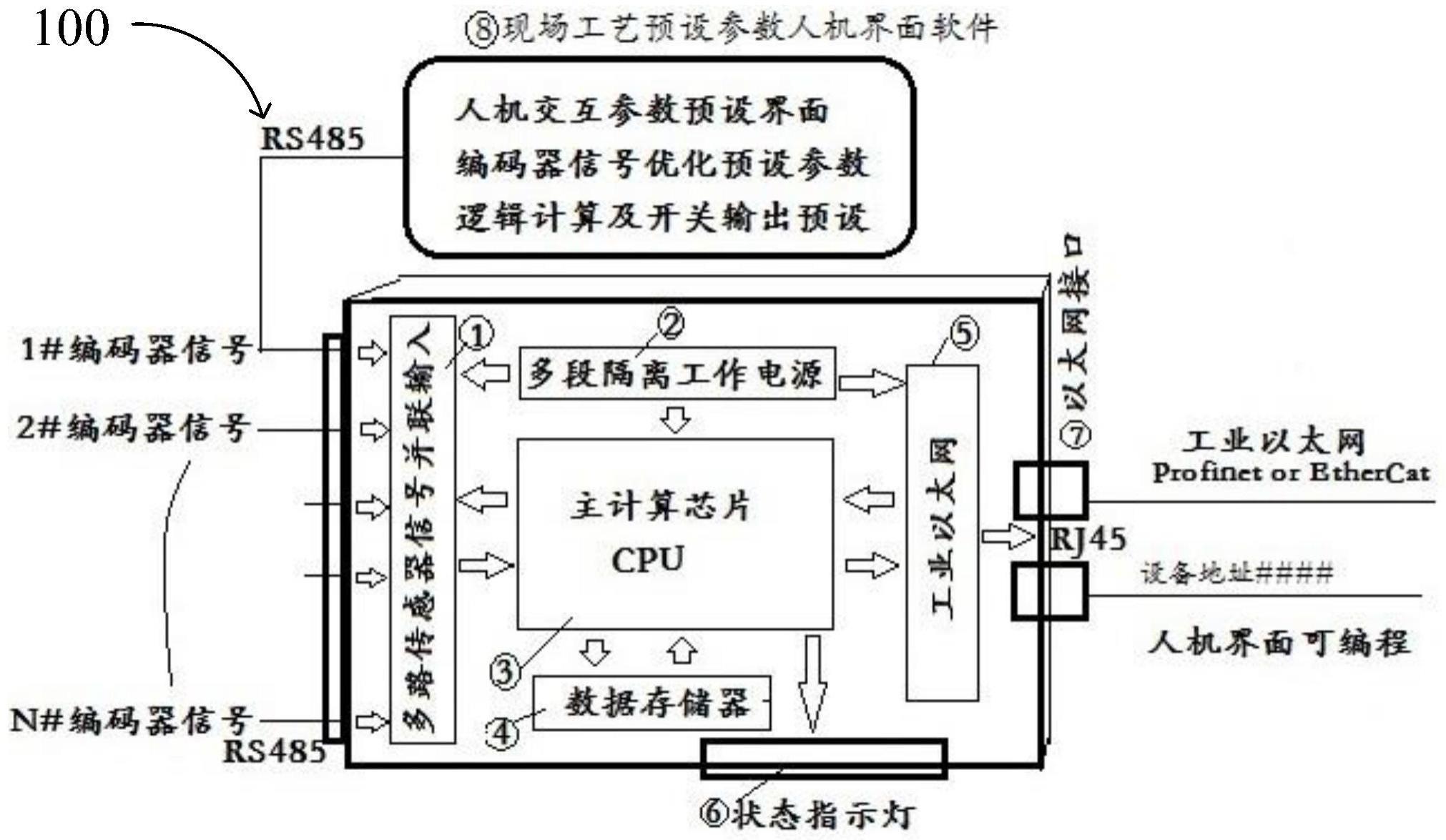
3、一种边缘处理装置,所述边缘处理装置用于数字化工厂,所述数字化工厂包括多个动力机械传动设备,每个所述动力机械传动设备设有状态传感器,所述状态传感器用于检测所述动力机械传动设备的参数并发出参数信号;所述边缘处理装置包括:
4、接收部,所述接收部用于接收多个所述状态传感器发出的参数信号,所述接收部还用于将接收的参数信号输送至下一级;
5、处理部,所述处理部与所述接收部通讯连接,所述处理部接收所述接收部输送的参数信号,所述处理部用于预处理并压缩参数信号,以生成编号排列时域数据;
6、输出部,所述输出部与所述处理部通信连接,所述输出部用于将所述时域数据输送至所述数字化工厂的上位机主机。
7、通过采用以上结构,边缘处理装置利用接收部接收多个状态传感器的参数信号,并对相关参数信号进行预处理和压缩,以生成编号排列时域数据,再利用输出部将编号排列时域数据输送至上位机主机,从而可以及时准确地获得动力机械传动设备的运行情况,也可以减少线上资源的占用,降低线上传输时间的占用,降低线上冲突的概率。
8、较佳地,多个所述状态传感器与所述边缘处理装置并联,多个所述状态传感器的参数信号同步实时发生至所述边缘处理装置。
9、通过采用以上结构,多个所述状态传感器与边缘处理装置并联,可以实现参数信号的快速、实时传递。
10、较佳地,所述处理部能够对所述参数信号融合计算处理;
11、和/或,所述处理部能够对所述参数信号保存;
12、和/或,所述处理部能够对所述动力机械传动设备的实际运行状态与所述动力机械传动设备的原始运行状态比对,以发出故障预警信号;
13、和/或,所述状态传感器包括主传感器及冗余传感器,所述处理部还用于所述主传感器的参数信号与所述冗余传感器的参数信号之间的比较。
14、通过采用以上结构,主传感器及冗余传感器可以进一步保障动力机械传动设备的安全运行。
15、较佳地,所述编号排列时域数据的数字格式包括所述动力机械传动设备的地址、开关输出、实时时钟。
16、通过采用以上结构,可以全面地掌握动力机械传动设备的运动状态。
17、较佳地,所述边缘处理装置还包括存储部,所述存储部用于储存所述状态传感器发出的参数信号和/或编号排列时域数据。
18、通过采用以上结构,存储部可以更加快速地保存相关数据。
19、较佳地,所述边缘处理装置还包括多个电源部,多个所述电源部分别对所述接收部、所述处理部、所述输出部供电,多个所述电源部之间互相隔离。
20、通过采用以上结构,多个互相隔离的电源部可以避免不同部件之间的干扰,可以提高便于处理装置的可靠性。
21、较佳地,所述边缘处理装置还包括接口,所述接口用于连接计算机,所述计算机能够通过所述边缘处理装置调整所述动力机械传动设备的参数。
22、通过采用以上结构,接口便于连接计算机,可以更加直接地通过边缘处理装置实现对动力机械传动设备的控制。
23、较佳地,所述边缘处理装置与所述上位机主机之间通过工业以太网相连接。
24、通过采用以上结构,工业以太网可以安全、可靠地提供网络连接。
25、佳地,所述边缘处理装置还包括状态指示灯,所述状态指示灯用于显示所述边缘处理装置内部数据自检状态、逻辑开关计算判断状态。
26、通过采用以上结构,状态指示灯便于识别边缘处理装置的不同状态。
27、一种数字化工厂,所述数字化工厂包括多个所述动力机械传动设备、上位机主机及如上所述的边缘处理装置,每个所述动力机械传动设备设有状态传感器,多个所述状态传感器与一个所述边缘处理装置通信连接,多个所述边缘处理装置与所述上位机主机通信连接。
28、通过采用以上结构,数字化工厂通过采用边缘处理装置,可以可靠地实现内部动力机械传动设备的控制,也可以降低内部线上资源的需求,提高数据输送的流畅性。
29、较佳地,每个所述状态传感器均能够实现信号自检、校验码纠错预警;
30、和/或,每个所述状态传感器能够对的采集到的数据进行初级优化,初级优化包括测量量程确定、分辨率及量纲转换;
31、和/或,多个所述状态传感器之间的数据采集同步时间记录、绝对值位置零点对齐、数据采集时间的时钟对齐。
32、较佳地,所述状态传感器包括绝对值编码器传感器。
33、较佳地,所述边缘处理装置接收所述状态传感器的参数信号后,所述边缘处理装置将多个参数信号以同一个设备地址传输至所述上位机主机。
34、较佳地,多个所述状态传感器能够预设逻辑计算、判断或处理控制。
35、较佳地,所述边缘处理装置能够对多个所述状态传感器的参数数据进行融合逻辑计算融合逻辑计算。
36、较佳地,所述动力机械传动设备包括变频电机、伺服电机、步进电机、机器人手臂中的一种或多种。
37、一种数字化工厂设备控制方法,所述数字化工厂设备控制方法用于如上所述的数字化工厂,所述数字化工厂设备控制方法包括:
38、所述数字化工厂内的多个所述动力机械传动设备设置相应的设置传感器;
39、多个所述传感器与一个所述边缘处理装置通信连接;
40、多个所述边缘处理装置与所述上位机主机通信连接。
41、在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
42、本发明的积极进步效果在于:
43、本发明通过利用接收部接收多个状态传感器的参数信号,并对相关参数信号进行预处理和压缩,以生成编号排列时域数据,再利用输出部将编号排列时域数据输送至上位机主机,从而可以及时准确地获得动力机械传动设备的运行情况,也可以减少线上资源的占用,降低线上传输时间的占用,降低线上冲突的概率。
- 还没有人留言评论。精彩留言会获得点赞!