资源约束下的飞行器能力建模方法
本发明属于系统工程领域。
背景技术:
1、旋翼飞行器自身可携带的资源有限,在执行任务时为了节省资源,现有技术通常控制软硬件资源参数最小化来求解优化其控制量的输出,这种方式虽然资源占用小,但以某一指标最优来优化资源参数并不能一次性解决所有问题,当旋翼飞行器处于不同工况或完成不同任务时对资源的要求并不相同,这些方法显然没有考虑全面,效率并不高。
2、旋翼飞行器的控制量包括螺旋桨拉力和力矩,软硬件资源参数包括电调输入电流、电调输入电压、电调油门指令、相机姿态、通信带宽和通信延迟,比如旋翼飞行器在执行大范围快速巡检任务时,要求机动性能强一些,通信性能要求相对弱,即电调输入电流、电调输入电压、电调油门指令这几个参数占用资源要大一些,其它参数占用资源相对小一些,而非所有参数都最小化;再比如,在大范围巡检过程中发现某处异常,则对目标识别性能的要求更高,此时,相机姿态所占用资源占比调大才能让任务执行的更优秀;另一个任务场景,发生传输信息异常,此时为了高效完成任务则应将通信带宽性能提到一定高度,使通信带宽资源参数的权重增大。可见,执行不同任务时,根据任务类型的不同,适当的调整不同参数的权重可以在资源优化的前提下更高效的完成任务,而现有旋翼飞行器无法完成这种灵活的调度方式,完成某项任务消耗的资源更多。
技术实现思路
1、针对现有旋翼飞行器考虑因素不全面,效率不高问题,本发明提供一种资源约束下的飞行器能力建模方法,用于优化旋翼飞行器调度。
2、本发明所述资源约束下的飞行器能力建模方法,该方法包括:
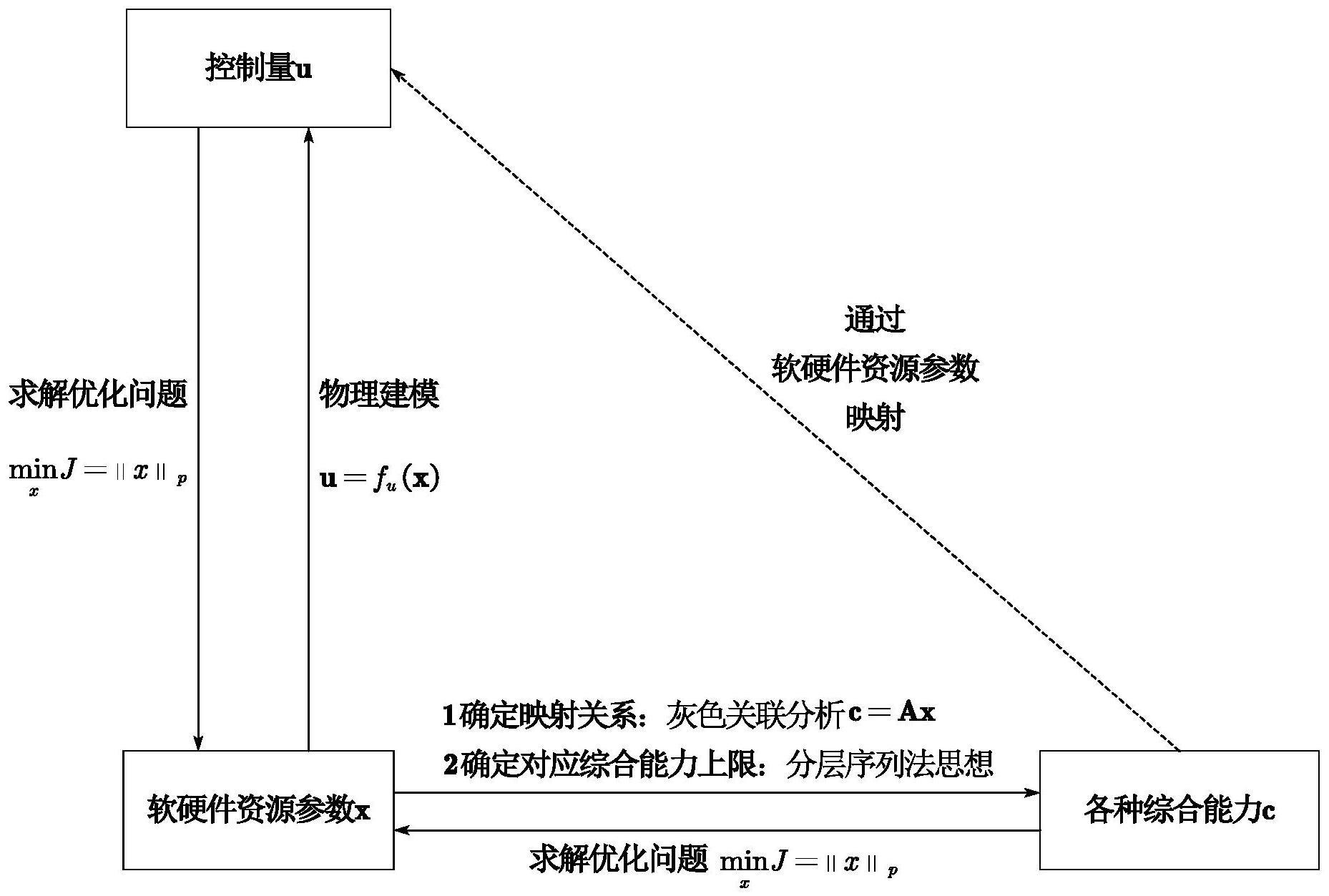
3、s1、建立旋翼飞行器中控制量u=[u1,u2,u3,…,uv]1×v与软硬件资源参数x=[x1,x2,x3,…,xm]1×m的映射关系,其中v为控制量个数,m为软硬件参数个数,
4、二者映射关系为:
5、u=fu(x)
6、在已知软硬件资源参数x的情况下,根据二者映射关系确定控制量u;
7、在已知控制量u的情况下,采用求解优化问题来通过控制量确定软硬件参数:
8、
9、||x||p为x的p范数;并建立约束条件:
10、
11、s2、建立旋翼飞行器中控制量u=[u1,u2,u3,…,uv]1×v与各种综合能力c=[c1,c2,c3,…,cn]1×n的映射关系,其中,n为能力个数;
12、c=ax
13、其中an×m为软硬件资源到综合能力的映射矩阵;
14、在已知软硬件资源参数x的情况下,根据映射关系计算出综合能力值c;
15、在已知各项综合能力值的情况下,采用求解优化问题来通过综合能力值确定软硬件参数:
16、
17、||x||p为x的p范数;并建立约束条件:
18、
19、s3、在旋翼飞行器执行任务时,根据任务类型确定能力等级,进而获取各项综合能力的最大值,在最大值范围内设计所需能力值,然后按s2的求解优化问题获取软硬件资源参数,再按s1的映射关系获取控制量。
20、优选地,旋翼飞行器中控制量包括螺旋桨拉力t、螺旋桨力矩m,与控制量相关的软硬件资源参数包括电调输入电压ue、电调输入电流ie和电调输入油门指令σ,旋翼飞行器中控制量和软硬件资源参数的映射关系式:[t,m]=fu([ue,ie,σ])
21、二者映射关系描述为:
22、
23、式中:dp为螺旋桨直径,ct和cm分别为无量纲的拉力系数和转矩系数,ρ为飞行空气密度,rm为电枢内阻,k1和k2均为常系数,nr为电调数量,re为电枢内阻,rb为电池内阻。
24、优选地,s1在已知控制量u的情况下,采用求解优化问题来通过控制量确定软硬件参数时以续航时间最长为优化目标,具体为:
25、
26、
27、其中,ib为电池电流,iemax是电调最大持续电流,kb是电池最大放电倍率。
28、优选地,s2中软硬件资源到综合能力的映射矩阵an×m为:
29、
30、矩阵元素{aij}求解过程为:
31、s21、对旋翼飞行器进行l次试验或仿真,并记录每次实验中各软硬件参数值x0=[xj]1×m,并由专家给出该次实验中以评分方式给出各种能力的能力值c0=[ci]1×n,i=1,2,...,n;
32、s22、根据s21获取第i种能力值序列以及第i种能力相关联的m个软硬件参数序列则第j个软硬件资源参数对第i种能力在第k组数据上的关联系数可以表示为
33、
34、式中,ρ∈[0,1]为分辨率系数,取值为0.5;第j个软硬件资源参数对第i个能力关联度表示为
35、
36、计算出{ζij}序列后,根据c0=ax0对其进行缩放,转化为第j个参数相对于第i个能力的权重{aij}序列,确定映射矩阵a。
37、优选地,s3在旋翼飞行器执行任务时,根据任务类型确定能力等级,进而获取各项综合能力的最大值,在最大值范围内设计所需能力值,然后按s2的求解优化问题获取软硬件资源参数,再按s1的映射关系获取控制量,具体为:
38、旋翼飞行器的n个能力根据在不同类型任务中的重要程度确定能力等级c1,c2,…,cq,q≤n,并依次求取所有能力等级c1,c2,…,cq的能力最大值:
39、能力等级的通式为:
40、ci=fi(x)
41、fi(x)=ai1x1+ai2x2+…+aimxm
42、先求出以f1(x)为目标函数,原模型中约束条件不变的重要程度最高的能力:
43、min-c1=-f1(x)=-(a11x1+a12x2+…+a1mxm)
44、
45、其中,旋翼飞行器上可携带的电池容量存在上限,分配给底层不同软硬件资源;其最优解为x1*,最优值为ximin表示第j种软硬件参数可取的最小值,xjmax表示第j种软硬件参数可取的最大值,表示电池容量的上限;
46、再求解重要程度第二的能力:
47、min-c2=-f2(x)=-(a21x1+a22x2+…+a2mxm)
48、
49、其中,ε1为适当小的正数;其最优解为x2*,最优值为
50、再求解重要程度第三的能力:εi,i=1,2,…,q-1
51、min-c3=-f3(x)=-(a31x1+a32x2+…+a3mxm)
52、
53、其中,ε2为适当小的正数;其最优解为x3*,最优值为
54、以此类推,最后求解重要程度第q的能力:
55、min-cq=-fq(x)
56、
57、其中,ε1,ε2,...,εq-1均为适当小的正数;其最优解为xq*,最优值为
58、每级能力最优值为能力的最大值,获取所有等级能力的最大值为对应的最优软硬件资源参数x*=xq*;
59、在最大值范围内设计本次任务中各等级能力值,即每级能力值小于或等于本级能力的最大值;
60、然后按s2的求解优化问题获取软硬件资源参数;
61、再按s1的映射关系或线性关系获取控制量u=fu(x)。
62、优选地,旋翼飞行器的能力包括机动能力、目标识别能力和通信能力,在执行以飞行为主的任务时,机动能力等级最高,通信能力等级第二,目标识别能力等级最低;在执行识别为主的任务时,目标识别能力等级,通信能力等级第二,机动能力等级最低;在通信异常状况下执行任务时,通信能力等级最高,目标识别能力等级第二,机动能力等级最低。
63、优选地,与综合能力相关的软硬件参数包括电调输入电压ue、电调输入电流ie和电调输入油门指令σ、相机姿态、通信带宽和通信延迟。
64、本发明的有益效果:本发明所述旋翼飞行器作为被控对象,其控制量考虑实际资源的消耗。在某些场景下,当旋翼飞行器自身可携带的资源有限时,为使旋翼飞行器工作时间更长、完成任务更高效,旋翼飞行器对控制系统中设计出的控制量进行评估:能否实现以及通过何种软硬件资源调度实现。为此,本发明引入综合能力这一指标。旋翼飞行器的各项综合能力是将旋翼飞行器的固有软硬件资源描述为一个数值,用以评估设计出的控制量在物理上能否实现的问题和解决控制量如何以最优的资源调度实现的问题。相较控制量和软硬件参数,综合能力值更直观易懂,便于直接根据实际需求进行设计。
65、本发明引入综合能力评估使得针对不同类型任务时能更优化各方面资源,提高效率,当旋翼飞行器在大范围快速进行巡检时,将机动能力的重要程度排在首位,通信能力其次,目标识别能力排在最后,则该项任务中会加大与机动能力相关的电调输入电流、电调输入电压、电调油门等参数值,降低与通信能力相关的通信带宽、通信延迟等参数值,而与目标识别能力相关的相机姿态参数所占用资源最少。若在大范围巡检过程中发现某处异常,则飞行器可以以较低的机动能力飞行,将目标识别能力排在首位,通信能力次之,机动能力排在最后。当发现异常后传输信息时,要求通信带宽尽可能大,用以高速清晰地传输图片,这时就需要将通信能力的重要程度排在首位。可见,采用本发明方法在执行不同类型任务时根据系统设计的能力值适应调节软硬件参数,使资源配置最优,在占用资源相对小的状态下高效完成任务。
- 还没有人留言评论。精彩留言会获得点赞!