一种提供多传感器监测的超低功耗智能感知设备的制作方法
1.本发明涉及一种智能感知设备,特别是一种提供多传感器监测的超低功耗智能感知设备。
背景技术:
2.据统计家电行业流通营销成本约占总成的47%,其中货损成本占8%,物流监管有巨大的利益管控空间,家电在物流过程中破损比例最高,约占到总货损的70%。目前货物管控痛点:位置状态信息不掌握、装卸运输难监管、追责定损无依据。因此家电行业运输标准和实际运输工况需要大量数据采集、监管分析并进行升级优化。
3.家电运输会经过出厂、运输、入库、配送等多个环节,从出厂到配送到用户手中的整个运输生命周期有时会长达一年以上时间,传统物流监测设备功耗高,耗电快,使用时间不到一月,不能够满足整个物流生命周期的监测。传统物流监测设备不能提供当产生货物跌落时的跌落高度值,该跌落高度值对货物定损追责有重要参考意义。
技术实现要素:
4.发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种提供多传感器监测的超低功耗智能感知设备。
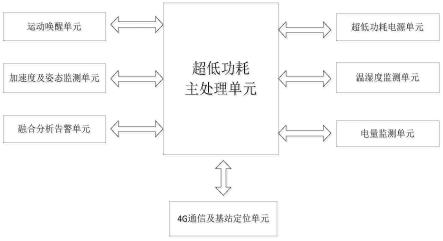
5.为了解决上述技术问题,本发明公开了一种提供多传感器监测的超低功耗智能感知设备,包括超低功耗主处理单元、超低功耗电源单元、运动唤醒单元、加速度及姿态监测单元、融合分析告警单元、4g通信及基站定位单元、温湿度监测单元和电量监测单元;
6.所述超低功耗主处理单元是所述智能感知设备的中心单元,智能感知设备中的其他单元均为接入单元,超低功耗主处理单元用于控制所述智能感知设备工作模式及接收处理其它接入单元数据;
7.所述超低功耗电源单元提供静态电流典型值为360na,10ua输出电流时的效率90%以上,1ma以上输出电流时效率95%以上;
8.所述运动唤醒单元用于当所述智能感知设备移动时将其从低功耗待机模式下唤醒;唤醒后,超低功耗主处理单元开始接收处理各接入单元数据;
9.所述加速度及姿态监测单元采用6轴陀螺仪传感器,基于卡尔曼滤波算法对所述设备的3维加速度和3维姿态角度进行测量;
10.所述融合分析告警单元,根据超低功耗主处理单元传入的3维加速度和3维姿态角度的值,融合分析监测的家电货物运输过程中是否发生异常状况,进行异常告警,并将告警信息返回给超低功耗主处理单元;
11.所述4g通信及基站定位单元用于提供智能感知设备所处位置及通过无线通信网络将智能感知设备的告警信息传送给后台;
12.所述温湿度监测单元监测智能感知设备所处环境的温湿度值,当温度或湿度超过设定阈值后,产生告警,并将告警信息发送给超低功耗主处理单元;
13.所述电量监测单元监测智能感知设备剩余电量值,当电量过低时进行告警,并将告警信息发送给超低功耗主处理单元。
14.所述融合分析告警单元融合分析监测的家电货物运输过程中是否发生异常状况的方法如下:
15.所述异常状况包括:急加速、急减速、倾倒、倒置或跌落;
16.判断是否发生急加速或急减速的异常状况的方法为:分析所述监测的家电货物前后方向上的加速度值a
x
,当所述加速度值a
x
从缓慢变化到突然产生跳变时,所述跳变即加速度变化值大于4g时,判断为发生了急加速或急减速的异常状况;
17.判断是否发生倾倒或倒置的异常状况的方法为:记所述智能感知设备前后方向的翻转角度为α,α的取值范围为-180
°
,180
°
,记所述智能感知设备左右方向的翻转角度为β,β的取值范围为-180
°
,180
°
,实时记录分析翻转角度α及β的变化趋势,当翻转角度α的值变换90
°±5°
,并稳定在90
°±5°
不变时,判定所述监测的家电货物发生了倾倒的异常状况,根据转角度α此时为90
°±5°
或-90
°±5°
,判定为向前倾倒或向后倾倒,当转角度α变化180
°±5°
,则判定为所述监测的家电货物发生了倒置的异常状况;
18.根据左右方向的翻转角度β的变化同理判定所述监测的家电货物发生左右方向上的倾倒或倒置的异常状况;
19.判断是否发生跌落的异常状况方法为:分析所述监测的家电货物在垂直于地面方向上的加速度分量是否小于0.1g并保持阈值时间后产生跳变,则判定所述监测的家电货物发生了跌落的异常状况。
20.所述融合分析告警单元中计算跌落高度值的方法为:忽略空气阻力作用影响,利用自由落体公式,计算得出跌落高度值,具体方法包括以下步骤:
21.步骤1,将所述智能感知设备平放于水平面上,所述6轴陀螺仪传感器测得垂直于水平面的加速度记为az,测得与水平面平行,前后方向上的加速度记为ay,测得与水平面平行,左右方向上的加速度记为ay;
22.步骤2,记智能感知设备前后方向的翻转角度为α,α的取值范围为-180
°
,180
°
,记智能感知设备左右方向的翻转角度为β,β的取值范围为-180
°
,180
°
;
23.步骤3,计算垂直于水平面的加速度分量a
′
,分以下情况:
24.记a
x
在垂直于水平面上的加速度分量为a
x
′
,ay在垂直于水平面上的加速度分量为ay′
,az在垂直于水平面上的加速度分量为az′
;
25.若智能感知设备平放于水平面上,a
x
和ay在垂直于水平面上的加速度分量为0,因此a
′
=az′
=az;
26.若智能感知设备前后方向翻转α,左右方向未翻转,ay在垂直于水平面上的加速度分量为0,a
x
和az在垂直于水平面上有加速度分量,则:
27.当|α|≤90
°
时:a
′
=a
x
′
+az′
=a
x
sin(|α|)+azcos(|α|)
28.当|α|》90
°
时:a
′
=a
x
′
+az′
=a
x
cos(|α|-90
°
)+azsin(|α|-90
°
)
29.若智能感知设备左右方向翻转β,前后方向未翻转,a
x
在垂直于水平面上的加速度分量为0,ay和az在垂直于水平面上有加速度分量,则:
30.当|β|≤90
°
时:a
′
=ay′
+az′
=aysin(|β|)+azcos(|β|)
31.当|β|》90
°
时:a
′
=ay′
+az′
=aycos(|β|-90
°
)+azsin(|β|-90
°
)
32.若智能感知设备前后方向翻转α,左右方向翻转β,a
x
、ay和az都在垂直于水平面上有加速度分量,则:
33.当|α|≤90
°
,且|β|≤90
°
时,
34.a
′
=a
x
′
+ay′
+az′
=a
x
sin(|α|)+aysin(|β|)+azcos(|α|)cos(|β|)
35.当|α|≤90
°
,且|β|》90
°
时,
36.a
′
=a
x
′
+ay′
+az′
=a
x
sin(|α|)+aycos(|β|-90
°
)+azcos(|α|)sin(|β|-90
°
)
37.当|α|》90
°
,且|β|≤90
°
时,
38.a
′
=a
x
′
+ay′
+az′
=a
x
cos(|α|-90
°
)+aysin(|β|)+azsin(|α|-90
°
)cos(|β|)
39.当|α|》90
°
,|β|》90
°
时,
40.a
′
=a
x
′
+ay′
+az′
41.=a
x
cos(|α|-90
°
)+aycos(|β|-90
°
)
42.+azsin(|α|-90
°
)sin(|β|-90
°
)
43.步骤4,确定智能感知设备开始跌落时间t1:当智能感知设备垂直地面的加速度分量的绝对值小于0.1g时,判定智能感知设备开始跌落,记录此时开始跌落时间t1,其中g为重力加速度,大小为9.8m/s2;
44.步骤5,统计跌落时间δt:当智能感知设备垂直地面的加速度分量产生跳变时,记录垂直于水平面的加速度分量a
′
》g时的时刻t2,则:δt=t
2-t1;
45.步骤6,利用自由落体高度计算公式,计算高度其中常量g=9.8m/s2。
46.所述超低功耗主处理单元,采用两级唤醒机制被唤醒:
47.第一级唤醒为从超低功耗待机状态唤醒到监测状态,第一级唤醒的方式有两种:一种为运动单元唤醒,另一种为rtc唤醒即定时唤醒;预先设定定时唤醒时间,判定定时唤醒时间内是否发生移动,若发生移动,运动唤醒单元将智能感知设备从超低功耗待机状态唤醒到监测状态,若未发生移动并且到达唤醒时间,rtc唤醒方式将智能感知设备从超低功耗待机状态唤醒到监测状态;
48.第二级唤醒为从监测状态唤醒到通信状态,当第一级唤醒为rtc唤醒时,智能感知设备在监测完姿态角度、温湿度及电量信息后,主动从监测状态唤醒到通信状态,打开4g通信及基站定位单元,将智能感知设备的姿态角度、温湿度、电量信息以及叠加上基站定位的位置信息通过无线通信网络发送给后台,发送完后再次进入超低功耗待机状态;当第一级唤醒为运动唤醒时,智能感知设备监测各传感器数据并传入融合分析告警单元进行异常分析,当未产生异常告警状况时,智能感知设备在预设时间间隔后再次进入超低功耗待机状态,当监测到异常告警状况时,智能感知设备会从监测状态唤醒到通信状态,打开4g通信及基站定位单元,将异常告警信息并叠加上基站定位的位置信息通过无线通信网络发送给后台,发送完后再次进入超低功耗待机状态。
49.所述4g通信及基站定位单元,根据测量不同基站下的行导频信号,得到不同基站下行导频的到达时刻toa,结合基站的坐标,采用三角定位算法,计算出智能感知设备所处位置,并将位置信息叠加到告警信息中,明确告警产生位置。
50.所述电量监测单元监测智能感知设备剩余电量值的方法包括:
51.首先对所述设备中的电池进行放电测试,建立电池放电曲线数据表,智能感知设备使用过程中需要获取电池电量时,对电池电压进行ad采样,测出电池电压值,根据该测量的电压值到表中查出所对应的电量,当电量值低于设定阈值时,进行告警,并将告警信息发送给超低功耗主处理单元。
52.所述超低功耗主处理单元的两级唤醒机制中的第一级唤醒为两种方式:一种方式为实时时钟rtc定时唤醒,另外一种方式为运动唤醒;所述运动唤醒,由运动唤醒单元实现。
53.所述运动唤醒单元采用微功耗mems加速度计,运动触发唤醒模式下功耗为270na,最低设置在1mg的运动量下进行唤醒触发。
54.所述超低功耗主处理单元中的mcu采用超低功耗32位arm处理器,型号为stm32l433,在实时时钟rtc定时唤醒的待机模式下,静态电流为280na。
55.有益效果:
56.本发明通过选用超低功耗mcu,设计超低功耗电源单元,并创新的二级唤醒机制,最大限度的降低设备功耗,可保证使用一年半时间,对家电物流全生命周期进行监测;并创新的利用6轴陀螺仪检测的3维加速度和3维姿态角度,采用跌落高度算法,计算得出货物跌落时的跌落高度值,该跌落高度值对货物定损追责有重要参考意义。
附图说明
57.下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述和/或其他方面的优点将会变得更加清楚。
58.图1是本发明一种提供多传感器监测的超低功耗智能感知设备单元组成图。
59.图2是本发明物流监测流程图。
具体实施方式
60.本发明公开了一种提供多传感器监测的超低功耗智能感知设备,包括超低功耗主处理单元、超低功耗电源单元、运动唤醒单元、加速度及姿态监测单元、融合分析告警单元、4g通信及基站定位单元、温湿度监测单元和电量监测单元;
61.所述超低功耗主处理单元是所述设备的中心单元,设备中的其他单元均为接入单元,超低功耗主处理单元用于控制所述设备工作模式及接收处理其它接入单元数据;
62.所述超低功耗电源单元具有极低的静态电流,典型值360na,轻载效率高,10ua输出电流时的效率高达90%,1ma以上输出电流时效率高达95%,有效的减少设备待机状态下电流跑电并保障电流的使用效率。-;
63.所述运动唤醒单元用于当所述设备移动时将其从低功耗待机模式下唤醒;唤醒后,超低功耗主处理单元开始接收处理各接入单元数据;
64.所述加速度及姿态监测单元采用6轴陀螺仪传感器,基于卡尔曼滤波算法对所述设备的3维加速度和3维姿态角度进行测量(参考:基于卡尔曼滤波的mems陀螺仪漂移补偿[j].机电工程,2013,30(03));
[0065]
所述融合分析告警单元,根据超低功耗主处理单元传入的3维加速度和3维姿态角度的值,可融合分析监测的家电货物运输过程中是否受到急加速、急减速、倾倒、倒置及跌落等异常告警,并将告警信息返回给超低功耗主处理单元;所述4g通信及基站定位单元用
于提供设备所处位置及通过无线通信网络将设备状态机告警信息传送给后台;
[0066]
所述温湿度监测单元监测设备所处环境的温湿度值,当温度或湿度超过设定阈值后,产生告警,并将告警信息发送给超低功耗主处理单元;
[0067]
所述电量监测单元监测设备剩余电量值,当电量过低时进行告警,并将告警信息发送给超低功耗主处理单元。
[0068]
进一步地,所述超低功耗主处理单元mcu采用超低功耗32位arm处理器,带rtc的待机模式下,静态电流为280na。
[0069]
进一步地,所述超低功耗主处理单元为最大降低功耗,采用两级唤醒机制,第一级唤醒为从低功耗待机状态唤醒到监测状态,第二级唤醒为从监测状态唤醒到通信状态。
[0070]
进一步地,所述第一级唤醒可由两种方式实现,一种方式为rtc定时唤醒,另外一种方式为运动唤醒。
[0071]
进一步地,运动唤醒由运动唤醒单元实现,运动唤醒单元采用微功耗mems加速度计,运动触发唤醒模式下功耗为270na,最低可设置在1mg的运动量下进行唤醒触发。
[0072]
进一步地,所述设备进入监测状态可监测处理各传感器数据,超低功耗主处理单元将3维加速度和3维姿态角度的值传入融合分析告警单元,可融合分析监测的家电货物运输过程中是否受到急加速、急减速、倾倒、倒置及跌落等异常告警,并将告警信息返回给超低功耗主处理单元。
[0073]
进一步地,所述融合分析告警单元判断监测货物受到急加速或急减速的方法为:分析货物前后方向上的加速度值a
x
,当判断a
x
从缓慢变化到突然产生跳变,加速度变化值大于4g时,判断产生急加速或急减速告警。
[0074]
进一步地,所述融合分析告警单元判断监测货物倾倒或倒置的方法为:记设备前后方向的翻转角度为α,α的取值范围为-180
°
,180
°
,记设备左右方向的翻转角度为β,β的取值范围为-180
°
,180
°
,实时记录分析α及β的变化趋势,以翻转角度为α为例,当判断α的值变换90
°±5°
,并稳定在90
°±5°
不变时,可判断货物发生了倾倒,根据α此时为90
°±5°
还是-90
°±5°
,可判断出向前倾倒还是向后倾倒,当变化了180
°±5°
,可判度出货物倒置,β变化同理。
[0075]
进一步地,所述跌落高度算法包括以下步骤:
[0076]
步骤1,将设备平放于水平面上,6轴陀螺仪传感器测得垂直于水平面的加速度记为az,测得与水平面平行,前后方向上的加速度记为a
x
,测得与水平面平行,左右方向上的加速度记为ay;
[0077]
步骤2,记设备前后方向的翻转角度为α,α的取值范围为-180
°
,180
°
,记设备左右方向的翻转角度为β,β的取值范围为-180
°
,180
°
;
[0078]
步骤3,计算垂直于水平面的加速度分量a
′
,分以下情况:
[0079]
记a
x
在垂直于水平面上的加速度分量为a
x
′
,ay在垂直于水平面上的加速度分量为ay′
,az在垂直于水平面上的加速度分量为az′
;
[0080]
若设备平放于水平面上,a
x
和ay在垂直于水平面上的加速度分量为0,因此a
′
=az′
=az;
[0081]
若设备前后方向翻转α,左右方向未翻转,ay在垂直于水平面上的加速度分量为0,a
x
和az在垂直于水平面上有加速度分量,
[0082]
当|α|≤90
°
时:a
′
=a
x
′
+az′
=a
x
sin(|α|)+azcos(|α|)
[0083]
当|α|》90
°
时:a
′
=a
x
′
+az′
=a
x
cos(|α|-90
°
)+azsin(|α|-90
°
)
[0084]
若设备左右方向翻转β,前后方向未翻转,a
x
在垂直于水平面上的加速度分量为0,ay和az在垂直于水平面上有加速度分量,
[0085]
当|β|≤90
°
时:a
′
=ay′
+az′
=aysin(|β|)+azcos(|β|)
[0086]
当|β|》90
°
时:a
′
=ay′
+az′
=aycos(|β|-90
°
)+azsin(|β|-90
°
)
[0087]
若设备前后方向翻转α,左右方向翻转β,a
x
、ay和az都在垂直于水平面上有加速度分量,
[0088]
当|α|≤90
°
,且|β|≤90
°
时,
[0089]a′
=a
x
′
+ay′
+az′
=a
x
sin(|α|)+aysin(|β|)+azcos(|α|)cos(|β|)
[0090]
当|α|≤90
°
,且|β|》90
°
时,
[0091]a′
=a
x
′
+ay′
+az′
=a
x
sin(|α|)+aycos(|β|-90
°
)+azcos(|α|)sin(|β|-90
°
)
[0092]
当|α|》90
°
,且|β|≤90
°
时,
[0093]a′
=a
x
′
+ay′
+az′
=a
x
cos(|α|-90
°
)+aysin(|β|)+azsin(|α|-90
°
)cos(|β|)
[0094]
当|α|》90
°
,|β|》90
°
时,
[0095]a′
=a
x
′
+ay′
+az′
[0096]
=a
x
cos(|α|-90
°
)+aycos(|β|-90
°
)
[0097]
+azsin(|α|-90
°
)sin(|β|-90
°
)
[0098]
步骤4,确定设备开始跌落时间t1:由于家电货物较重,跌落时可忽略空气阻力作用,认为是自由落体,当设备垂直地面的加速度分量的绝对值小于0.1g时,可认为设备开始跌落,记录此时开始跌落时间t1,其中g为重力加速度,大小为9.8m/s2;
[0099]
步骤5,统计跌落时间δt:家电货物与地面接触瞬间,会有较大的冲击,加速度会产生跳变,记录垂直于水平面的加速度分量a
′
》g时的时刻t2,则:δt=t
2-t1;
[0100]
步骤6,利用自由落体高度计算公式,计算高度其中g=9.8m/s2。
[0101]
进一步地,当未监测到有任何异常告警时,3钟后设备重新进入低功耗待机状态,当监测到有异常告警时,如设备跌落,此时设备进行第二级唤醒,从监测状态唤醒到通信状态。
[0102]
进一步地,进入到通信状态,超低功耗主处理单元打开4g通信及基站定位单元,4g通信及基站定位单元根据测量不同基站下的行导频信号,得到不同基站下行导频的(到达时刻),根据该测量结果并结合基站的坐标,采用三角公式估算算法(参考:基于三点定位与加权坐标的三角定位算法[j].计算机工程与应用,2020,56(09):111-116),计算出设备所处位置,并将位置信息叠加到告警信息中,最后将告警信息通过无线通信方式传送给后台服务器,告警信息算送完后重新进入低功耗待机状态。
[0103]
实施例:
[0104]
下面结合附图及实施例对本发明做进一步说明。
[0105]
如图1所示,本发明公开了一种提供多传感器监测的超低功耗智能感知设备,包括低功耗主处理单元、低功耗电源单元、运动唤醒单元、加速度及姿态监测单元、融合分析告警单元、4g通信及基站定位单元、温湿度监测单元和电量监测单元;
[0106]
如图2所示,本发明的物流监测流程如下:
[0107]
首先将超低功耗智能感知设备按固定位置方向安装到家电货物包装中,保证安装牢固,不产生晃动;
[0108]
设备信息与家电货物信息进行绑定,用于记录追踪具体家电货物物流状态监测信息;
[0109]
家电货物静止放置时,设备处于超低功耗待机状态;
[0110]
设备处于超低功耗待机状态时,rtc正常工作,当到达设定的时间后,本发明设定的时间为24h,设备会从超低功耗待机状态唤醒到监测状态,此时超低功耗主处理单元接收加速度及姿态监测单元、温湿度监测单元和电量监测单元数据,组装好货物放置姿态角度、所处环境温湿度及剩余电量报文后,将设备从监测状态唤醒到通信状态,打开4g通信及基站定位单元,将基站定位信息添加到报文中,并通过无线4g通信方式发送给后台,随后设备从新进入超低功耗待机状态,等待下次唤醒;
[0111]
设备处于超低功耗待机状态时,当家电货物被移动,运动唤醒单元会将设备会从超低功耗待机状态唤醒到监测状态,此时超低功耗主处理单元接收加速度及姿态监测单元发送的3维加速度和3维姿态角度值,并将该值传入融合分析告警单元,该采用跌落高度算法计算当产生跌落时的跌落高度值,当未监测到有货物倾倒、跌落等告警时,设备3分钟后重新进入超低功耗待机状态;当监测到有货物倾倒、跌落等告警时,超低功耗主处理单元将设备从监测状态唤醒到通信状态,打开4g通信及基站定位单元,将定位信息添加到告警报文中,并通过无线4g通信方式发送给后台,随后设备从新进入超低功耗待机状态,等待下次唤醒;
[0112]
上述跌落高度算法包括以下步骤:
[0113]
步骤1,将设备平放于水平面上,6轴陀螺仪传感器测得垂直于水平面的加速度记为az,测得与水平面平行,前后方向上的加速度记为a
x
,测得与水平面平行,左右方向上的加速度记为ay;
[0114]
采用跌落平台设备进行跌落测试,进行60cm跌落测试,跌落平台设备将家电货物垂直升至离平台60cm处静止。根据步骤1,此时测得a
x
=0.001g,ay=0.003g,az=0.995g,其中g为重力加速度,大小为9.8m/s2;
[0115]
步骤2,记设备前后方向的翻转角度为α,α的取值范围为-180
°
,180
°
,记设备左右方向的翻转角度为β,β的取值范围为-180
°
,180
°
;
[0116]
根据步骤2,此时测得α=0
°
,β=0
°
;
[0117]
步骤3,计算垂直于水平面的加速度分量a
′
,分以下情况:
[0118]
记a
x
在垂直于水平面上的加速度分量为a
x
′
,ay在垂直于水平面上的加速度分量为ay′
,az在垂直于水平面上的加速度分量为az′
;
[0119]
若设备平放于水平面上,a
x
和ay在垂直于水平面上的加速度分量为0,因此a
′
=az′
=az;
[0120]
若设备前后方向翻转α,左右方向未翻转,ay在垂直于水平面上的加速度分量为0,a
x
和az在垂直于水平面上有加速度分量,
[0121]
当|α|≤90
°
时:a
′
=a
x
′
+az′
=a
x
sin(|α|)+azcos(|α|)
[0122]
当|α|》90
°
时:a
′
=a
x
′
+az′
=a
x
cos(|α|-90
°
)+azsin(|α|-90
°
)
[0123]
若设备左右方向翻转β,前后方向未翻转,a
x
在垂直于水平面上的加速度分量为0,ay和az在垂直于水平面上有加速度分量,
[0124]
当|β|≤90
°
时:a
′
=ay′
+az′
=aysin(|β|)+azcos(|β|)
[0125]
当|β|》90
°
时:a
′
=ay′
+az′
=aycos(|β|-90
°
)+azsin(|β|-90
°
)
[0126]
若设备前后方向翻转α,左右方向翻转β,a
x
、ay和az都在垂直于水平面上有加速度分量,
[0127]
当|α|≤90
°
,且|β|≤90
°
时,
[0128]a′
=a
x
′
+ay′
+az′
=a
x
sin(|α|)+aysin(|β|)+azcos(|α|)cos(|β|)
[0129]
当|α|≤90
°
,且|β|》90
°
时,
[0130]a′
=a
x
′
+ay′
+az′
=a
x
sin(|α|)+aycos(|β|-90
°
)+azcos(|α|)sin(|β|-90
°
)
[0131]
当|α|》90
°
,且|β|≤90
°
时,
[0132]a′
=a
x
′
+ay′
+az′
=a
x
cos(|α|-90
°
)+aysin(|β|)+azsin(|α|-90
°
)cos(|β|)当|α|》90
°
,|β|》90
°
时,
[0133]a′
=a
x
′
+ay′
+az′
[0134]
=a
x
cos(|α|-90
°
)+aycos(|β|-90
°
)
[0135]
+azsin(|α|-90
°
)sin(|β|-90
°
)
[0136]
根据步骤3,此时a
′
=az′
=az=0.995g,其中g为重力加速度,大小为9.8m/s2;
[0137]
步骤4,确定设备开始跌落时间t1:由于家电货物较重,跌落时可忽略空气阻力作用,认为是自由落体,当设备垂直地面的加速度分量的绝对值小于0.1g时,可认为设备开始跌落,记录此时开始跌落时间t1,其中g为重力加速度,大小为9.8m/s2;
[0138]
根据步骤4,此时a
′
》0.1g,认为未产生跌落,控制跌落平台设备松开家电货物让其跌落,实时计算a
′
值,在t1时刻,计算得到a
′
=0.08g小于0.1g,认为货物发生跌落,开始统计跌落时间,由加速度及姿态监测单元输出3维加速度和3维姿态角度的频率为100hz,主处理器采用的是32位高性能处理器,采用arm cortex-m4内核,可忽略主处理器的计算时间,因此每计算一次a
′
的时间间隔为0.01s;
[0139]
步骤5,统计跌落时间δt:家电货物与地面接触瞬间,会有较大的冲击,加速度会产生跳变,记录垂直于水平面的加速度分量a
′
》g时的时刻t2,则:δt=t
2-t1;
[0140]
根据步骤5,在t2时刻,a
′
产生跳变,由小于0.1g跳变到16g,在t1到t2时刻之间,统计计算a
′
的次数为35,因此δt=35
×
0.01=0.35s;
[0141]
步骤6,利用自由落体高度计算公式,计算高度其中g=9.8m/s2。
[0142]
根据步骤6,计算得出跌落高度与实际跌落测量误差为0.03cm。
[0143]
重复以上步骤进行多次跌落测试,误差都在1cm,满足精度要求。
[0144]
待货物配送完成后,取消绑定,并将设备拆除回收,用于下次家电货物运输监测。
[0145]
具体实现中,本技术提供计算机存储介质以及对应的数据处理单元,其中,该计算机存储介质能够存储计算机程序,所述计算机程序通过数据处理单元执行时可运行本发明提供的一种提供多传感器监测的超低功耗智能感知设备的发明内容以及各实施例中的部分或全部步骤。所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)
或随机存储记忆体(random access memory,ram)等。
[0146]
本领域的技术人员可以清楚地了解到本发明实施例中的技术方案可借助计算机程序以及其对应的通用硬件平台的方式来实现。基于这样的理解,本发明实施例中的技术方案本质上或者说对现有技术做出贡献的部分可以以计算机程序即软件产品的形式体现出来,该计算机程序软件产品可以存储在存储介质中,包括若干指令用以使得一台包含数据处理单元的设备(可以是个人计算机,服务器,单片机,muu或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
[0147]
本发明提供了一种提供多传感器监测的超低功耗智能感知设备的思路及方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1