一种针对超近程制导弹的有限时间控制方法
1.本发明导弹姿态控制技术领域,特别涉及一种针对超近程制导弹的有限时间控制方法。
背景技术:
2.现在战争要求各国军事力量具备全纵深,宽正面的打击能力,因此研制能够打击近距离目标,保护己方高价值目标的超近程导弹是十分必要的。超近程导弹的射程范围一般在3000m以内,飞行时间一般在10s左右。根据制导带宽和姿控带宽匹配关系,超近程导弹姿态控制系统需要具备更短的调节时间,而单纯地提高控制系统响应速度,会造成超调量增加,导致跟踪制导指令的精度下降,进而影响导弹命中目标的精度。因此,相较于大射程导弹,超近程导弹对控制系统的快速性和准确性都提出了更高的要求。
3.随着现代控制理论的不断发展,针对导弹姿态控制的技术方法层出不穷,各有优劣。通过线性化手段处理导弹系统模型,进而基于线性控制理论(如pid、lqr等)设计控制器的方法忽视了系统的非线性和耦合特性,很难准确描述系统完整动态,且无法兼顾控制系统的快速性和准确性。反演控制技术为解决非线性系统的设计问题提供了一种有效的途径,其主要思路是通过构造虚拟控制变量来降低控制系统的阶次,逐级递推最终设计出非线性控制律。此种方法虽然能够获得较为理想的控制效果,但是控制律中指令的微分量难以准确获得且各级子系统对虚拟指令的细微跟踪误差都会在系统中传递和累积。
4.近些年来,有限时间控制因其收敛速度快、控制精度高等优势,受到了各国学者的重视,能够为解决超近程导弹相关控制问题提供全新可行的思路。针对导弹姿态控制系统这一类二阶系统,主要有三种控制器设计方法能够达到有限时间控制,分别为齐次方法、终端滑模方法和加幂积分方法。齐次方法要求系统具备齐次度,终端滑模方法存在奇异问题,难以应用到导弹姿态控制系统。加幂积分方法不要求系统的齐次性,且控制解算无奇异问题,同时具备收敛时间上界可计算等优点。因此,研究加幂积分这一有限时间控制技术在近程导弹姿态控制系统的应用方法具有重要意义。
技术实现要素:
5.本发明的目的在于提供一种针对超近程制导弹的有限时间控制方法,解决现有技术中姿态指令跟踪误差收敛时间长的问题,在保证控制系统跟踪精度的前提下,实现跟踪误差在有限时间内收敛。
6.实现本发明目的的技术解决方案为:一种针对超近程制导弹的有限时间控制方法,包括以下步骤:
7.基于导弹运动模型,提取姿态控制模型;
8.基于微分同胚映射方法进行系统坐标转换,获得积分串联控制模型;
9.将集总干扰扩张成系统状态,设计扩张状态观测器;
10.在有限时间控制理论框架内,利用增加幂积分技术进行控制器设计。
11.进一步地,所述姿态控制模型是从描述导弹在纵向平面运动的方程中提取,包含攻角和俯仰角速度两个状态变量,为典型二阶系统。
12.进一步地,所述积分串联型模型是利用微分几何理论知识进行坐标变换,进而通过逆变换建立的新坐标系统。
13.进一步地,所述扩张状态观测器是将集总干扰扩张为系统状态量,进而设计状态观测器进行估计。
14.进一步地,所述控制器设计是利用增加幂次积分技术对新坐标系统的两个状态量进行非线性组合设计控制器,其典型特征在于反馈量的幂次积分。
15.本发明与现有技术相比,其有益效果为:本发明以从纵向运动模型中提取的控制模型为对象,进行坐标转换和控制器设计,可实现控制系统对姿态角指令跟踪误差在有限时间内收敛,相较于传统设计方法,其控制精度和跟踪速度均有大幅度提高,能够满足超近程导弹的姿态控制需求;同时,给出了最大收敛时间和控制增益的解析映射关系,为控制系统参数设计提供理论指导。
附图说明
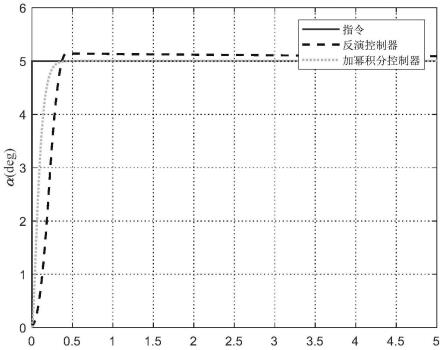
16.图1为攻角跟踪性能对比曲线图。
17.图2为控制舵偏对比曲线图。
18.图3为扩张状态观测器估计曲线(x1)图。
19.图4为扩张状态观测器估计曲线(x2)图。
20.图5为扩张状态观测器估计曲线(x3)图。
21.图6为扩张状态观测器估计误差曲线图。
具体实施方式
22.实施例1
23.本发明实施例的一种超近程导弹有限时间控制方法,可应用于导弹姿态控制,具体包括以下步骤:
24.s1,建立姿态控制模型。
25.超近程导弹采用轴对称外形,其纵向运动与侧向运动规律是相似的,因此,本专利只研究超近程导弹的纵向平面运动。
[0026][0027]
式中:y为发射系下纵向位置,v为导弹飞行速度,m为导弹质量,g为重力加速度,iz为转动惯量;p,l,d分别为导弹受到的推力,升力和阻力;mz为导弹受到的俯仰力矩;α,θ,分别为攻角,弹道倾角和俯仰角;ωz为俯仰角速度,τ为单位时间内燃料消耗量。
[0028]
将模型中与姿态参数α,θ,ωz相关的方程提取出来,可获得如下姿态运动方程:
[0029][0030]
其中,升力l和俯仰力矩mz可依据下式计算:
[0031][0032]
式中,q为动压;s和l分别为参考面积和参考长度;δz为俯仰通道舵偏;c
l
和分别为升力和俯仰力矩标称系数,δl和δmz为对应的摄动系数。进一步从俯仰力矩系数中分离出俯仰舵控制力矩为:
[0033][0034]
将和代入,进一步整理得:
[0035][0036]
其中,
[0037][0038]
式中,w
α
和w
ω
为风干扰。
[0039]
s2,积分串联控制模型
[0040]
考虑到一种在二阶系统中应用的加幂积分方法要求控制系统为积分串联型,因此在本步骤中将转化为积分串联形式。
[0041]
首先,定义新坐标系统状态量为x1,其与原始状态量存在如下映射关系
[0042]
x1=α-αcꢀꢀꢀ
(7)
[0043]
式中,αc为攻角指令,则
[0044][0045]
定义新坐标系统另一状态量为x2,其与原始状态量存在如下映射关系
[0046][0047]
则
[0048][0049]
重写和得积分串联控制模型:
[0050][0051]
式中
[0052][0053]
d2作为集总干扰需要在控制器中予以补偿。
[0054]
s3,扩张状态观测器
[0055]
考虑到集总干扰在控制器中的补偿需求,设计扩张状态观测器进行估计,进而进行补偿。将集总干扰扩张成系统另一状态量x3,系统被改写成
[0056][0057]
进一步设计状态观测器为
[0058][0059]
式中,和分别状态量x1,x2和x3的估计值;k
o,1
,k
o,2
和k
o,3
为需要适当选取的参数,ε为增益参数。
[0060]
s4,加幂积分控制器
[0061]
针对这类二阶系统模型,标准加幂积分利用状态量xi|
i∈{1,2}
作为反馈构造控制器,其具体形式为:
[0062][0063]
式中,g1∈(1,2)、p2=(2-g1)/g1,增益参数β1和β2满足如下约束
[0064][0065]
其中l1和l2为任意正常数。从约束条件可以看出,加幂积分的增益参数β1和β2不仅形式复杂,且如果在仿真或实际应用中真的按设置β1和β2的值会导致控制器的输出过大。因此,本发明摒弃约束条件,给出新型的加幂积分控制器为:
[0066][0067]
式中,k1和k2为合适的正的控制增益参数,指数g满足g∈(1,2)。
[0068]
为验证控制算法的有效性和优势,本发明将上述基于加幂积分方法设计的控制器和传统反演控制进行对比仿真。其模型相关参数如表1所示:
[0069]
表1超近程制导弹模型相关参数
[0070][0071]
力和力矩系数表示为
[0072][0073]
用于对比的反演控制算法为:
[0074][0075]
式中,ω
zc
为角速度虚拟指令,k
α
和k
ω
为正的反演控制增益。其取值分别为k
α
=0.1和k
ω
=1。
[0076]
扩张状态观测器相关参数如表2所示:
[0077]
表2扩张状态观测器增益
[0078][0079][0080]
加幂积分控制器相关参数取值如表3所示:
[0081]
表3加幂积分控制器增益
[0082][0083]
通过图1~图6的对比仿真图可以看出,加幂积分控制器方法能够平滑快速地跟踪姿态角指令,调节时间在0.35s,且全程无超调;而反演控制器为了追求相近的快速性导致较大的超调量,且超调引起的误差在5s内仍然没有消除。因此加幂积分控制器比反演控制器具有更好的跟踪性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1