基于事件触发的变脉冲周期控制方法
1.本发明属于事件触发控制技术领域,具体涉及一种基于事件触发的变脉冲周期控制方法。
背景技术:
2.近年来,对非线性控制系统的研究已取得了明显进展。非线性控制方法包括线性反馈控制、自适应控制、滑膜控制、控制、反馈线性化控制等等,这些方法都已被广泛用来解决实际的非线性控制问题。但是上述非线性控制方法都属于连续控制,控制成本高造成了资源的浪费,且具有一定局限性。因为在现实中很多受控对象不可以受到持续控制作用,例如种群生物系统、化学系统和金融系统。脉冲控制是一种不连续的控制方法,兼具离散和连续的特点,将控制作用间断地施加于控制系统,显然突破连续控制的局限性,获得了研究者们的关注。
技术实现要素:
3.本发明的目的是提供一种基于事件触发的变脉冲周期控制方法,通过调整脉冲控制周期有利于减少资源浪费。
4.本发明所采用的技术方案是,基于事件触发的变脉冲周期控制方法,具体包括以下步骤:
5.步骤1,建立非线性系统模型;
6.步骤2,设置事件触发条件;
7.步骤3,建立闭环脉冲控制器;
8.步骤4,根据步骤1、步骤2和步骤3建立系统动力学模型。
9.本发明的特征还在于,
10.步骤1非线性系统模型为:
[0011][0012]
式(1)中,x∈rn为系统状态,其中rn表示n维实数空间集合,f∈rn→rn
为非线性光滑连续函数,x0为系统在t0时刻初值。
[0013]
步骤2事件触发条件为:
[0014]
设δ为阈值,表示事件触发时刻,事件触发条件为:
[0015]
inf{x(ti)}≥δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0016]
式(2)中inf表示集合的下确届,x(ti)表示系统在ti时刻的状态。
[0017]
步骤3闭环脉冲控制器为:
[0018]
[0019]
式(3)中,为脉冲控制下的控制信号,k为脉冲控制增益矩阵。脉冲控制器的控制时间,tj满足0《t0《t1《t2《...和《...和表示在脉冲时刻tj的左极限,tj=t
j-1
+δ,其中δ为脉冲间隔,表示系统在时刻的状态。
[0020]
步骤4系统动力学模型为:
[0021][0022]
式(4)中,tk=ti∩tj,即受控系统时刻为脉冲时刻和事件触发时刻的并集,u为事件触发变周期间隔的脉冲控制信号。
[0023]
本发明的有益效果是:
[0024]
本发明基于事件触发的变脉冲周期控制方法满足控制资源高效利用,脉冲控制对受控系统产生间歇性影响,所需能量比连续控制小;事件触发的脉冲控制使受控系统只在满足特定条件时才触发控制条件,根据受控情况实时调整脉冲控制周期,间接优化了脉冲控制作用,进一步有效避免资源的浪费。
附图说明
[0025]
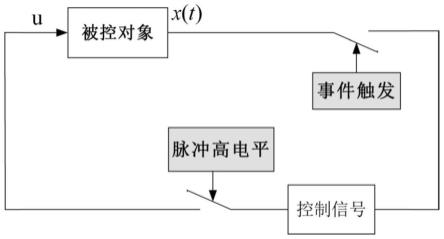
图1是本发明基于事件触发的变脉冲周期控制方法的控制框图;
[0026]
图2是本发明基于事件触发的变脉冲周期控制方法中事件触发信号和脉冲信号以及控制信号周期的关系波形图;
[0027]
图3是本发明基于事件触发的变脉冲周期控制方法中驱动系统和响应系统同步仿真图;
[0028]
图4是本发明基于事件触发的变脉冲周期控制方法中驱动系统和响应系统同步误差仿真图。
具体实施方式
[0029]
下面结合附图和具体实施方式对本发明进行详细说明。
[0030]
如图1所示,基于事件触发的变脉冲周期控制方法基本原理是:首先确定事件触发条件,当同时满足事件触发条件和脉冲信号的高电平时,控制器接入受控系统,对受控系统产生作用。
[0031]
步骤1:建立一类连续非线性系统模型:
[0032][0033]
式(1)中,x∈rn为系统状态,其中rn表示n维实数空间集合,f∈rn→rn
为非线性光滑连续函数,x0为系统在t0时刻初值。
[0034]
本发明所提方法可以控制两个系统进行同步,选用延迟chen系统作为驱动系统,其动力学方程为:
[0035][0036]
式(2)中,x(t),y(t)和z(t)分别代表系统的3个状态变量,a=35,b=3,c=17,k=3.8和τ=0.3为系统参数,系统初值为[-0.1,-1,0.1]。
[0037]
选择与驱动系统相同的延迟chen系统作为响应系统,令响应系统初值为[0.1,1,0.1]。
[0038]
步骤2:设置事件触发条件;
[0039]
设δ为阈值,表示事件触发时刻。则事件触发条件为:
[0040]
inf{x(ti)}≥δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0041]
式(3)中inf表示集合的下确届,x(ti)表示系统在ti时刻的状态。
[0042]
设δ=1e-5,则事件触发条件为:
[0043]
x(ti)≥1e-5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0044]
当动力学方程的状态幅值大于等于阈值δ时,满足事件触发条件。
[0045]
步骤3:建立闭环脉冲控制器如下:
[0046][0047]
式(5)中为脉冲控制下的控制信号,k为脉冲控制增益矩阵。脉冲控制器的控制时间,tj满足0《t0《t1《t2《...和《...和表示在脉冲时刻tj的左极限,tj=t
j-1
+δ,其中δ为脉冲间隔,表示系统在时刻的状态。
[0048]
首先驱动系统与响应系统作差,得到一组同步误差信号,记作e=[e1,e2,e3],将误差信号经过比例放大,作为闭环脉冲控制器信号施加到响应系统上,使得响应系统与驱动系统发生同步。令脉冲控制增益矩阵为k=diag(-0.2,-1.8,-1.8),δ=5ms,产生一组脉冲信号。
[0049]
闭环脉冲控制器的方程为:
[0050][0051]
步骤4:结合步骤1、步骤2和步骤3,得到受控的系统动力学模型为:
[0052][0053]
式(7)中,tk=ti∩tj,即受控系统时刻为脉冲时刻和事件触发时刻的并集,u为事
件触发变周期间隔的脉冲控制信号。
[0054]
受控时间tk不是固定值,只有当事件触发和脉冲高电平同时满足,则此时刻为tk。在tk时刻,控制器作用于受控系统。事件触发信号和脉冲信号以及控制信号周期的关系波形图如图2所示,当事件触发信号和脉冲信号均为高电平时,才能产生控制信号,即前两者为相与的关系。
[0055]
延迟chen系统的响应系统受到事件触发的变脉冲控制方程为:
[0056][0057]
受控响应系统将产生与驱动系统同步的信号,仿真结果如图3所示。它们的同步误差图如图4所示,由图3和图4可得,在控制器作用下,两个信号在100s左右发生同步。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1