自移动机器人的回归对接方法、系统及自移动机器人与流程
本发明属于自移动机器人,具体涉及一种自移动机器人的回归对接方法、系统及自移动机器人。
背景技术:
1、随着科学技术的发展,智能的自移动机器人为人们所熟知,由于自移动机器人可以自动预先设置的程序执行预先设置的相关任务,无须人为的操作与干预,因此在工业应用及家居产品上的应用非常广泛。工业上的应用如执行各种功能的机器人,家居产品上的应用如智能割草机、吸尘器等,这些自移动机器人极大地节省了人们的时间,给工业生产及家居生活都带来了极大的便利。但这些自移动机器人由于采用电池供电,当电池的电量被用尽后,这些自移动机器人就无法工作了,所以一般设定当自移动机器人的电量低于某一个设定的值,程序可选择的控制自移动机器人回归基站为电池充电。
2、目前,现有技术采用复杂的基站对接结构或者添置额外的引导磁条,以确保自移动机器人能够精准地回归基站并与基站对接。这种引导磁条只有在自移动机器人行驶在磁条之上时才能感应到,而且布设麻烦,成本高,在近距离对接时精度难以提升。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的现有的自移动机器人回归对接精度低的技术问题。
2、为解决上述技术问题,本发明提供一种自移动机器人的回归对接方法包括:
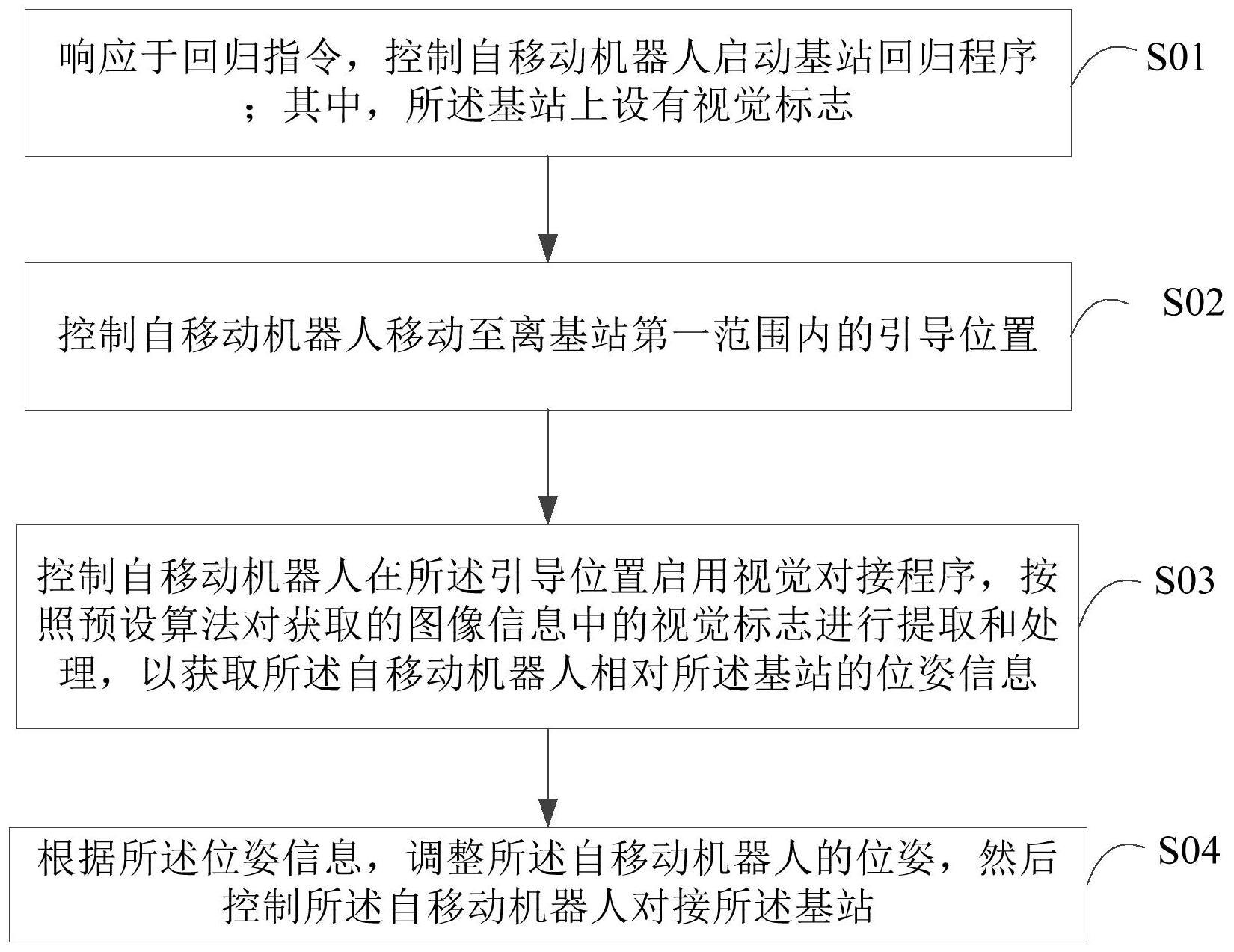
3、响应于回归指令,控制自移动机器人启动基站回归程序;其中,所述基站上设有视觉标志;
4、控制自移动机器人移动至离基站第一范围内的引导位置;
5、控制自移动机器人在所述引导位置启用视觉对接程序,按照预设算法对获取的图像信息中的视觉标志进行提取和处理,以获取所述自移动机器人相对所述基站的位姿信息;
6、根据所述位姿信息,调整所述自移动机器人的位姿,然后控制所述自移动机器人对接所述基站。
7、在其中一实施例,所述控制自移动机器人移动至离基站第一范围内的引导位置包括:
8、采用全局导航算法,获得所述基站在导航地图中的位置坐标,然后控制所述自移动机器人向所述位置坐标的方向移动。
9、在其中一实施例,所述控制自移动机器人移动至离基站第一范围内的引导位置包括:
10、根据所述基站在导航地图中的位置坐标,确定所述引导位置;其中,所述引导位置位于所述基站前方,距离所述基站在所述第一范围内。
11、在其中一实施例,所述控制自移动机器人在所述引导位置启用视觉对接程序包括:
12、通过全景摄像单元获取所述自移动机器人周边全景的图像信息。
13、在其中一实施例,所述按照预设算法对获取的图像信息中的视觉标志进行提取和处理,以获取所述自移动机器人相对所述基站的位姿信息,包括:
14、检测并获得包含所述视觉标志的目标图像;
15、识别所述目标图像中的视觉标注的实际边角坐标;
16、通过视觉优化算法获得相机与视觉标志的坐标系转换对应关系;
17、根据所述转换对应关系,获取所述自移动机器人相对所述基站的位姿信息。
18、在其中一实施例,所述识别所述目标图像中的视觉标志的实际边角坐标,包括:
19、对获取的所述视觉标志的图像数据进行滤波处理,将处理后的数据作为实际边角坐标。。
20、在其中一实施例,调整所述自移动机器人的位姿,然后控制所述自移动机器人对接所述基站。
21、在其中一实施例,所述根据所述位姿信息,调整所述自移动机器人的位姿,然后控制所述自移动机器人对接所述基站包括:
22、根据所述位姿信息与当前规划路径,调整所述自移动机器人的移动方向,并使所述移动方向正对所述视觉标志的中心位置;
23、控制所述自移动机器人沿所述中心位置移动,直至对接所述基站。
24、在其中一实施例,所述根据所述位姿信息,调整所述自移动机器人的移动方向,并使所述移动方向正对所述视觉标志的中心位置;
25、包括:
26、基于所述位姿信息与预设的路径位姿偏差,采用pid算法获得所述自移动机器人的移动方向的调整指令;
27、基于所述调整指令调整所述自移动机器人的移动方向。
28、本发明实施例还提供一种自移动机器人的回归对接系统。该自移动机器人的回归对接系统包括:
29、回归模块,用于响应于回归指令,控制自移动机器人启动基站回归;其中,所述基站上设有视觉标志;
30、定位导航模块,用于控制自移动机器人移动至离基站第一范围内的引导位置;
31、对接导航模块,用于控制自移动机器人在所述引导位置启用视觉对接程序,按照预设算法对获取的图像信息中的视觉标志进行提取和处理,以获取所述自移动机器人相对所述基站的位姿信息;
32、对接控制模块,用于控制自移动机器人根据所述位姿信息调整自身的位姿并控制自移动机器人按照调整后的位姿向基站对接。
33、本发明实施例还提供一种自移动机器人。该自移动机器人包括;
34、机器人主体;
35、控制器,设置于所述机器人主体上;
36、其中,控制器配置为执行下述操作:
37、响应于回归指令,控制自移动机器人启动基站回归;其中,所述基站上设有视觉标志;
38、控制自移动机器人移动至离基站第一范围内的引导位置;
39、控制自移动机器人在所述引导位置启用视觉对接程序,按照预设算法对获取的图像信息中的视觉标志进行提取和处理,以获取所述自移动机器人相对所述基站的位姿信息;
40、根据所述位姿信息,调整所述自移动机器人的位姿,然后控制所述自移动机器人对接所述基站。
41、本发明提供的技术方案,具有以下优点:
42、本发明实施例提供的自移动机器人的回归对接方法、系统及自移动机器人,在回归对接过程中,先快速地导航至离基站第一范围内的引导位置,再在引导位置处采用视觉对接程序以调整自移动机器人相对基站的位姿,从而能够快速且精准地实现自移动机器人与基站的对接。
技术特征:
1.一种自移动机器人的回归对接方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种自移动机器人的回归对接方法,其特征在于,所述控制自移动机器人移动至离基站第一范围内的引导位置包括:
3.根据权利要求2所述的一种自移动机器人的回归对接方法,其特征在于,所述控制自移动机器人移动至离基站第一范围内的引导位置包括:
4.根据权利要求1所述的一种自移动机器人的回归对接方法,其特征在于,所述控制自移动机器人在所述引导位置启用视觉对接程序包括:
5.根据权利要求4所述的一种自移动机器人的回归对接方法,其特征在于,所述按照预设算法对获取的图像信息中的视觉标志进行提取和处理,以获取所述自移动机器人相对所述基站的位姿信息,包括:
6.根据权利要求5所述的一种自移动机器人的回归对接方法,其特征在于,所述识别所述目标图像中的视觉标志的实际边角坐标,包括:
7.根据权利要求1所述的一种自移动机器人的回归对接方法,其特征在于,所述根据所述位姿信息,调整所述自移动机器人的位姿,然后控制所述自移动机器人对接所述基站包括:
8.根据权利要求7所述的一种自移动机器人的回归对接方法,其特征在于,所述根据所述位姿信息,调整所述自移动机器人的移动方向,并使所述移动方向正对所述视觉标志的中心位置;
9.一种自移动机器人的回归对接系统,其特征在于,所述系统包括:
10.一种自移动机器人,其特征在于,包括;
技术总结
本发明实施例提供了一种自移动机器人的回归对接方法、系统及自移动机器人。自移动机器人在回归对接过程中,先快速地导航至离基站第一范围内的引导位置,再在引导位置处采用视觉对接程序以调整自移动机器人相对基站的位姿,从而能够快速且精准地实现自移动机器人与基站的对接。
技术研发人员:翁禹来,刘汶欣,谢雪堃,李宽,袁鹏
受保护的技术使用者:深圳市来语飞智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!