一种双驱龙门平台高速状态下偏载急停控制方法与流程
1.本发明涉及伺服电机控制技术领域,尤其涉及一种双驱龙门平台高速状态下偏载急停控制方法。
背景技术:
2.在制造业中,对设备加工效果要求越来越高,比如压料、激光切割、木工板式家具等加工设备行业,机床行程较长,且速度要求较高,所以机床一般采用龙门双驱的结构。双驱龙门结构机床一般有两个机械传动机构并列于机架两侧,共同带动龙门轴进行无间隙运动,两侧机械传动结构各由一个电机独立控制。
3.但是,在高速龙门同步状态下,当某一轴受到大负载扰动时(即撞击刚性材质),一般龙门同步系统无法快速响应,导致双轴的龙门偏差迅速增大进而损坏龙门机械结构。如图1所示,提供了在该情况下压料机工作的情况,因为轴1受到大负载扰动,进而导致产生异常折弯件。
4.因此,急需一种新的技术方案解决上述技术问题。
技术实现要素:
5.本发明的目的在于克服上述现有技术的问题,提供了一种双驱龙门平台高速状态下偏载急停控制方法,使用fpga实现双轴间的高速数据交互,mcu根据交互的数据确定偏载状态与控制方式,用以解决当某一轴受到大负载扰动时(即撞击刚性材质),一般龙门同步系统无法快速响应,导致双轴的龙门偏差迅速增大进而损坏龙门机械结构的问题。
6.上述目的是通过以下技术方案来实现:
7.一种双驱龙门平台高速状态下偏载急停控制方法,包括用于驱动龙门平台的motor1模块和motor2模块,所述motorl模块和所述motor2模块内分别设置有编码器,所述motorl模块分别与mcu1模块和fpga1模块连接,所述mcu1模块分别与上位机和fpga1模块连接,所述fpga1模块还与第一rs422接口模块连接;所述motor2模块分别与mcu2模块和fpga2模块连接,所述mcu2模块分别与所述上位机和fpga2模块连接,所述fpga2模块还与第二rs422接口模块连接;所述第一rs422接口模块与所述第二rs422接口模块通信连接;包括如下步骤:
8.步骤(1)偏载判断通过双轴编码器反馈与惯量值计算双轴的估计电流,通过双轴的估计电流与对应的实际电流的差值获取双轴的负载数据;
9.设定特定阈值a与特定阈值b,当某轴的负载数据超过特定阈值a且双轴的负载数据差距超过特定阈值b时,即可确定为偏载轴,继续步骤(2);
10.步骤(2)偏载轴急停控制设定偏移值c,并根据当前实际编码器反馈确定新的位置指令值,将模型环中的速度前馈立刻清零,并设定撞击方向的转矩限制为较小值;所述新的位置指令值为当前编码器反馈值-偏移值c;所述偏移值c为自定义设定;
11.步骤(3)空轴急停控制根据空轴的一般响应性确定一阶惯性时间,当偏载逻辑判
断满足后,根据偏载轴的编码器反馈和惯量值计算速度前馈与电流前馈并送至模型环中,根据偏载轴的编码器反馈与一阶惯性时间计算补偿后的位置指令。
12.进一步地,在所述步骤(1)中双轴通过第一rs422接口模块与第二rs422接口模块之间的通信实现电流速度位置三环同步与数据交互。
13.进一步地,当fpga1模块或fpga2模块在发送本轴通信时也在接受对方的通信,利用通信的起始帧信号可以确定本轴的通信与对方的通信是否存在时间差异,当有差异时调整超前的fpga1模块或fpga2模块即可完成周期同步;通信周期同步后,利用该周期输出电流环、速度环和位置环的控制信号。
14.进一步地,步骤(1)中所述负载数据的计算公式如下:
[0015][0016]
其中,tm表示负载力矩,te表示电机电磁转矩,j表示转动惯量,ω表示角速度。
[0017]
进一步地,步骤(3)中所述一阶惯性时间的计算公式如下:
[0018][0019]
其中,t表示一阶惯性时间,y表示位置反馈,x表示位置指令;
[0020]
根据伺服正常运行的位置指令位置反馈即可计算出大致的一阶惯性时间系数t。
[0021]
进一步地,步骤(3)中所述根据偏载轴的编码器反馈和惯量值计算速度前馈,计算公式如下:
[0022][0023]
其中,x表示编码器反馈,ω表示角速度。
[0024]
进一步地,步骤(3)中所述根据偏载轴的编码器反馈和惯量值计算电流前馈,计算公式如下:
[0025][0026]
其中,tf表示电流前馈,j表示转动惯量,ω表示角速度。
[0027]
进一步地,步骤(3)中所述根据偏载轴的编码器反馈与一阶惯性时间计算补偿后的位置指令,计算公式如下:
[0028]
p=x+ω*t
[0029]
其中,p表示位置指令补偿,x表示堵转轴编码器反馈,ω表示角速度,t表示一阶惯性时间。
[0030]
有益效果
[0031]
本发明所提供的一种双驱龙门平台高速状态下偏载急停控制方法,使用fpga实现双轴间的高速数据交互,mcu根据交互的数据确定偏载状态与控制方式,可有效增加龙门同步系统在某一轴受到大负载扰动时的快速响应,可有效提高龙门平台的使用寿命,增加工作的安全性。
附图说明
[0032]
图1为传统技术下压料机异常示意图;
[0033]
图2为本发明所述一种双驱龙门平台高速状态下偏载急停控制方法中系统拓扑图;
[0034]
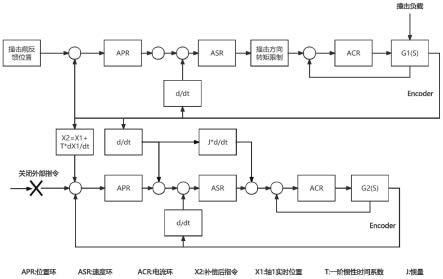
图3为本发明所述一种双驱龙门平台高速状态下偏载急停控制方法的示意图。
具体实施方式
[0035]
下面根据附图和实施例对本发明作进一步详细说明。所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0036]
如图2所示,一种双驱龙门平台高速状态下偏载急停控制方法,包括用于驱动龙门平台的motor1模块和motor2模块,所述motor1模块和所述motor2模块内分别设置有编码器,所述motor1模块分别与mcu1模块和fpga1模块连接,所述mcu1模块分别与上位机和fpga1模块连接,所述fpga1模块还与第一rs422接口模块连接;所述motor2模块分别与mcu2模块和fpga2模块连接,所述mcu2模块分别与所述上位机和fpga2模块连接,所述fpga2模块还与第二rs422接口模块连接;所述第一rs422接口模块与所述第二rs422接口模块通信连接。
[0037]
其中,所述mcu1模块与所述fpga1模块之间通过spi协议通信,所述fpga1模块与motor1模块之间通过485通信协议通信,所述mcu1模块与与motor1模块之间通过pwm通信协议通信;
[0038]
所述mcu2模块与所述fpga2模块之间通过spi协议通信,所述fpga2模块与motor2模块之间通过485通信协议通信,所述mcu2模块与与motor2模块之间通过pwm通信协议通信。
[0039]
如图3所示,本方法包括如下步骤:
[0040]
步骤(1)偏载判断通过双轴编码器反馈与惯量值计算双轴的估计电流,通过双轴的估计电流与对应的实际电流的差值获取双轴的负载数据;
[0041]
设定特定阈值a与特定阈值b,当某轴的负载数据超过特定阈值a且双轴的负载数据差距超过特定阈值b时,即可确定为偏载轴,继续步骤(2);所述特定阈值a与所述特定阈值b可自定义设定;
[0042]
步骤(2)偏载轴急停控制设定偏移值c,并根据当前实际编码器反馈确定新的位置指令值,将模型环中的速度前馈立刻清零,并设定撞击方向的转矩限制为较小值;所述新的位置指令值为当前编码器反馈值-偏移值c;所述偏移值c为自定义设定。
[0043]
步骤(3)空轴急停控制根据空轴的一般响应性确定一阶惯性时间,当偏载逻辑判断满足后,根据偏载轴的编码器反馈和惯量值计算速度前馈与电流前馈并送至模型环中,根据偏载轴的编码器反馈与一阶惯性时间计算补偿后的位置指令。
[0044]
其中,在所述步骤(1)中双轴通过第一rs422接口模块与第二rs422接口模块之间的通信实现电流速度位置三环同步与数据交互。
[0045]
其中,由于双轴晶振存在差异需同步电流环速度环与位置环,双fpga采样同样的周期发送通信数据,当fpga在发送本轴通信时也在接受对方的通信,利用通信的起始帧信
号可以确定本轴的通信与对方的通信是否存在时间差异,当有差异时调整超前的fpga即可完成周期同步。即当fpga1模块或fpga2模块在发送本轴通信时也在接受对方的通信,利用通信的起始帧信号可以确定本轴的通信与对方的通信是否存在时间差异,当有差异时调整超前的fpga1模块或fpga2模块即可完成周期同步;通信周期同步后,利用该周期输出三环(即电流环、速度环和位置环)的控制信号。
[0046]
本方法步骤(1)中所述负载数据的计算公式如下:
[0047][0048]
其中,tm表示负载力矩,te表示电机电磁转矩,j表示转动惯量,ω表示角速度。
[0049]
由于伺服指令与反馈存在滞后性假设伺服系统为一阶惯性环节,本方法步骤(3)中所述一阶惯性时间的计算公式如下:
[0050][0051]
其中,t表示一阶惯性时间,y表示位置反馈,x表示位置指令;
[0052]
根据伺服正常运行的位置指令位置反馈即可计算出大致的一阶惯性时间系数t。
[0053]
本方法步骤(3)中所述根据偏载轴的编码器反馈和惯量值计算速度前馈,计算公式如下:
[0054][0055]
其中,x表示编码器反馈,ω表示角速度。
[0056]
本方法步骤(3)中所述根据偏载轴的编码器反馈和惯量值计算电流前馈,计算公式如下:
[0057][0058]
其中,tf表示电流前馈,j表示转动惯量,ω表示角速度。
[0059]
本方法步骤(3)中所述根据偏载轴的编码器反馈与一阶惯性时间计算补偿后的位置指令,计算公式如下:
[0060]
p=x+ω*t
[0061]
其中,p表示位置指令补偿,x表示堵转轴编码器反馈,ω表示角速度,t表示一阶惯性时间。
[0062]
以上所述仅为说明本发明的实施方式,并不用于限制本发明,对于本领域的技术人员来说,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1