带执行器失效的无人艇固定时间共识控制方法
本发明涉及无人艇,具体为带执行器失效的无人艇固定时间共识控制方法。
背景技术:
1、随着海洋科技受到越来越多的关注,自主下水潜航器、无人机和无人艇等海洋航行器成为海洋探测领域的研究热点。无人艇的控制是以导航输出作为期望信号,同导航律构成稳定控制系统,解决航行过程中的动态定位、轨迹跟踪、路径跟踪等控制问题。然而,无人艇的控制面临模型高度非线性和系统的行器失效、外部干扰和未知的时变控制增益等挑战,同时无人艇在基础配置的情况下搭载不同的任务载荷模块,然而各个模块之间需要大量的通信资源来维持系统的稳定性。
2、现有的技术方案多数是针对单个无人艇系统的控制方法,本发明针对通过通信拓扑图连接的多无人艇系统提出一种多无人艇系统的共识控制方法,可以实现无人艇的共识一致跟踪。
3、现有的技术方案多数忽略了通信资源是有限的问题,本发明在控制器中设计了事件触发机制,以减少控制信号的更新频率,从而在一定程度上缓解系统的通信压力。
4、目前有限时间控制方法使系统收敛时间与系统初始状态有关,但实际应用中,状态变量是无法提前测量的。而且,当系统远离平衡点时,收敛时间会更长。本发明设计控制器利用固定时间控制理论,实现系统快速有限时间稳定的,且收敛时间与系统初始状态无关
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了带执行器失效的无人艇固定时间共识控制方法,具有良好的跟踪精度等优点,解决了状态变量无法提前测量的问题。
3、(二)技术方案
4、为实现上述具有良好的跟踪精度目的,本发明提供如下技术方案:带执行器失效的无人艇固定时间共识控制方法,包括以下步骤:
5、s1、对无人艇进行建模,得到状态方程。
6、s2、定义误差系统,并设计第一虚拟控制律αk,i1。
7、s3、设计事件触发机制。
8、s4、设计第二虚拟律αk,i2。
9、s5、设计自适应律
10、s6、对算法进行仿真实验。
11、优选的,所述在s1.1、步骤中,无人艇的数学模型给定如下:
12、
13、其中,k=1,2,...,n,xk,1=[xk,11,xk,21,xk,31]t和xk,2=[xk,12,xk,22,xk,32]t分别表示位置和速度表示xk,1的导数;表示xk,2的导数;yk表示系统输出;fk(xk,1,xk,2)为惯性阻尼矩阵;gk(t)=diag{gk,1(t),gk,2(t),gk,3(t)}表示时变的质量矩阵;为系统执行器失效的非线性模型,ρk(t)为执行器的健康系数,rk(t)为执行器不可控特性,ρk(t)和rk(t)均为时变的。
14、优选的,所述在s2.1、步骤中,定义误差系统如下:
15、
16、其中,ek,i1为同步误差,ek,i2是虚拟控制误差,αk.i1是第一虚拟控制律,y0,i为领导者输出信号。hk(k=1,2,...,n)表示从领导者到第k个跟随者的信息传输系数。如果跟随着k能从领导者0获取信息,则hk>0,反之hk=0。akj表示权重参数。
17、第一虚拟控制律αk,i1设计如下:
18、
19、其中,bk,i1、ck,i1为正数的设计参数;为y0,i的导数;q为常数,且
20、优选的,所述在s3.1、步骤中,在传统的时间触发机制中,无人艇执行器输入是定时更新的,这需要占用大量的通信资源。因此设计了切换阈值事件触发机制,进一步降低的更新频率,从而缓解系统通信压力。事件触发机制设计如下:
21、
22、
23、
24、其中,δk,i、sk,i1、sk,i2和δk,i都是正数;0<ιk,i<1;为测量误差;tk,i,z+1表示控制器的信号更新时刻,tk,i,1表示初始时刻t0,z为正整数;inf{·}表示下确界;αk,i2为第二虚拟控制律。
25、每当触发事件时,控制量将作用于执行器,控制量将保持到下一个事件被触发。显然,控制信号更新机制可以降低更新频率,从而减轻通信压力。
26、优选的,所述在s4.1步骤中,由于系统模型存在不确定部分,利用神经网络逼近处理系统模型的不确定部分,并根据虚拟控制误差ek,i2设计虚拟控制律αk,i2和自适应律进一步,s4.11具体包括:系统中存在连续非线性函数其中x表示输入向量,且如果则表示αk,i1的导数;引入一个未知的正参数其中||·||表示二范数;参数θ可以通过估计,即为参数θ的估计值,那么最终估计误差可以定义为因此,利用神经网络逼近非线性连续函数的表达式如下:
27、
28、其中,为理想未知权值向量,且表示的转置;sk,j(xk,j)为基函数向量,且sk,j(xk,j)=[sk,j1(xk,j),sk,j2(xk,j),...,sk,jn(xk,j)]t;n为神经网络的节点数,且n>1;υk,i(xk,i)为逼近误差,满足且且s4.12,可根据反步设计方法,利用上述神经网络与虚拟控制误差ek,i2构造第二虚拟控制律αk,i2:
29、
30、
31、其中,μk,i、bk,i2、ck,i2、εk,i、τk,i均为正数,是θk,i的估计值,且估计误差||·||表示二范数。
32、优选的,所述在s5.1步骤中,设计自适应律
33、
34、
35、
36、其中,γk,i、κk,i、σk,i、λk,i、μk,i、ξk,i、lk,i均为正数。令与并定义其边界和且ζk,i=inft≥0{ζk,i}>0,sup{·}表示上确界,inf{·}表示下确界。定义自适应参数和来估计和可以得到估计误差和
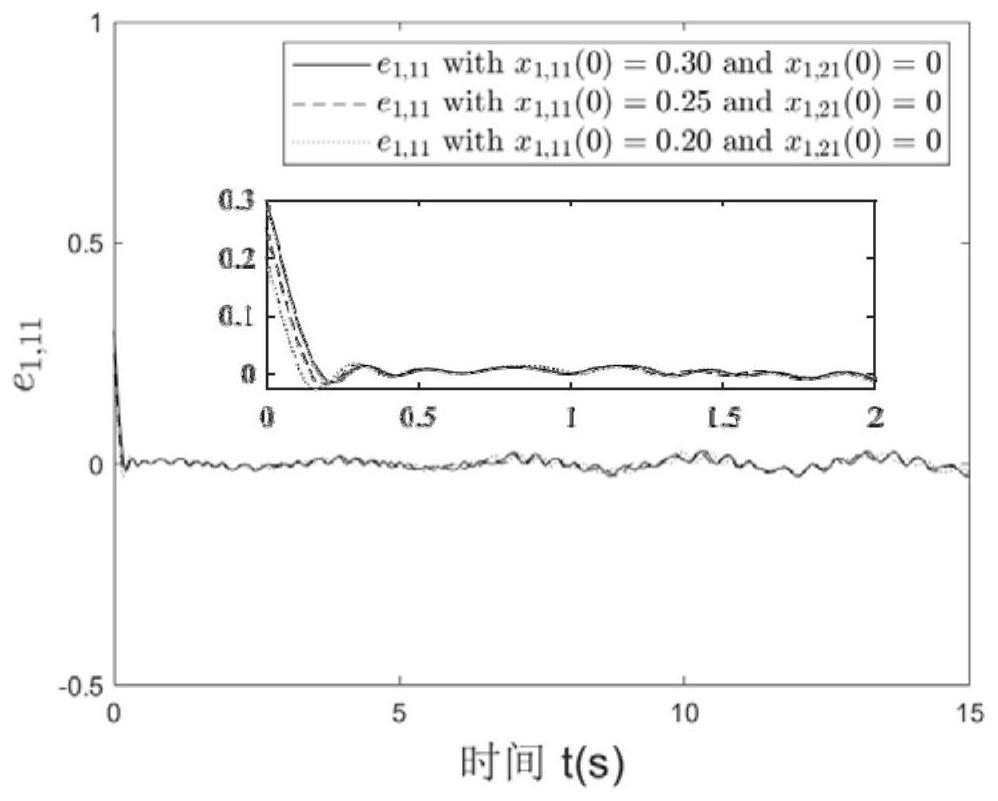
37、优选的,所述在s6.1步骤中,为了验证该算法的有效性,将该算法部署到无人艇。图1表示无人艇之间的通信拓扑图(0表示领导者,1,2,3表示跟随者),无人艇的模型如下:
38、
39、其中,k=1,2,...,n,xk,1=[xk,11,xk,21,xk,31]t和xk,2=[xk,12,xk,22,xk,32]t分别表示位置和速度;表示xk,1的导数;表示xk,2的导数;gk(t)=diag{gk,1(t),gk,2(t),gk,3(t)}是时变的质量矩阵;dk=[dk,1,dk,2,dk,3]t是未知的外部干扰;和yk=[yk,1,yk,2,yk,3]t分别表示控制输入和系统输出;为系统执行器失效的非线性模型,ρk(t)=diag{ρk,1(t),ρk,2(t),ρk,3(t)}为执行器的健康系数,rk(t)=[rk,1(t),rk,2(t),rk,3(t)]t为执行器不可控特性,ρk(t)和rk(t)均为时变的;fk(xk,1,xk,2)为向心、科氏力和水动力阻尼和扭矩,其中fk(xk,1,xk,2)=ξ·xk,2,
40、
41、
42、
43、无人艇的相关系统参数如下:a=-1+0.1(-1)k,a=-25+2.5(-1)k,b=-10+(-1)k,b=-200+20(-1)k,c=-0.5+0.05(-1)k,c=-1500+150(-1)k,
44、系统的初始状态如下:x1,1(0)=[0.3,0.3,0.3]t,x2,1(0)=[0.2,0.2,0.2]t,x3,1(0)=[0.1,0.1,0.1]t,x1,2(0)=[0,0,0]t,x2,2(0)=[0,0,0]t,x3,2(0)=[0,0,0]t。假设领导者的输出为y0=[sin(2t),sin(2t),0]t。自适应参数的初始值:和其中,k=1,2,3,i=1,2,3,
45、(三)有益效果
46、与现有技术相比,本发明提供了带执行器失效的无人艇固定时间共识控制方法,具备以下有益效果:
47、1、该带执行器失效的无人艇固定时间共识控制方法,无人艇系统即使受到行器失效、未知的时变控制增益和外部干扰的影响,系统的跟踪误差也可以在固定时间内收敛到原点附近,并且收敛时间与系统初始状态无关。
48、2、该带执行器失效的无人艇固定时间共识控制方法,针对执行机构故障、外界干扰和控制增益时变等因素对无人艇系统的影响,提出了一种边界估计方法来补偿其对系统的影响,使系统具有较高的控制精度。此外,在控制器中设计了事件触发机制来缓解通信压力。
- 还没有人留言评论。精彩留言会获得点赞!