一种带电作业机器人系统的无人机辅助系统的制作方法
本发明涉及电力,具体涉及一种带电作业机器人系统的无人机辅助系统。
背景技术:
1、目前带电作业机器人多是单独完成现场作业,监控现场全景情况仅依靠安装在作业斗上的一台全景摄像机,视野相对受限。主动避障功能依靠内置避障程序,安全性有待提升。受可见光限制,目前所有带电作业机器人仅支持白天作业。现场作业安全措施是使用遮蔽围栏等硬隔离措施。同时无人机技术已被广泛应用与各行各业,其辅助功能与应用案例也有很全面的探索,但是在带电作业机器人领域涉及颇少。因此如何探索一条无人机辅助系统弥补现阶段带电作业机器人的一些不足,提升带电作业效率,就显得至关重要。
2、带电作业机器人全景视角受限,存在视野盲区,无法准确定位复杂环境下的作业位置,因此需要一种更加灵活地全景视角支撑机器人的辅助决策,提升带电作业工作效率。同时带电作业机器人的主动智障能力主要体现在通过运行学正逆解算法加预演的模式避障,存在一定的出错率,需要提供一种双保险保证带电作业的本质安全。
3、目前带电作业机器人使用场景受多种因素限制,例如周围环境、时间长度、作业内容等,迫切需要一些辅助功能来协助带电作业机器人完成更多的带电作业。
技术实现思路
1、为解决现有技术所存在的技术问题,本发明提供一种带电作业机器人系统的无人机辅助系统,通过主动协同系统和无人机系统的信息采集模块和执行模块可以灵活地全景视角支撑带电作业机器人的辅助决策,提升带电作业机器人的工作效率。
2、本发明可以通过采取如下技术方案达到:
3、一种带电作业机器人系统的无人机辅助系统,所述系统包括:
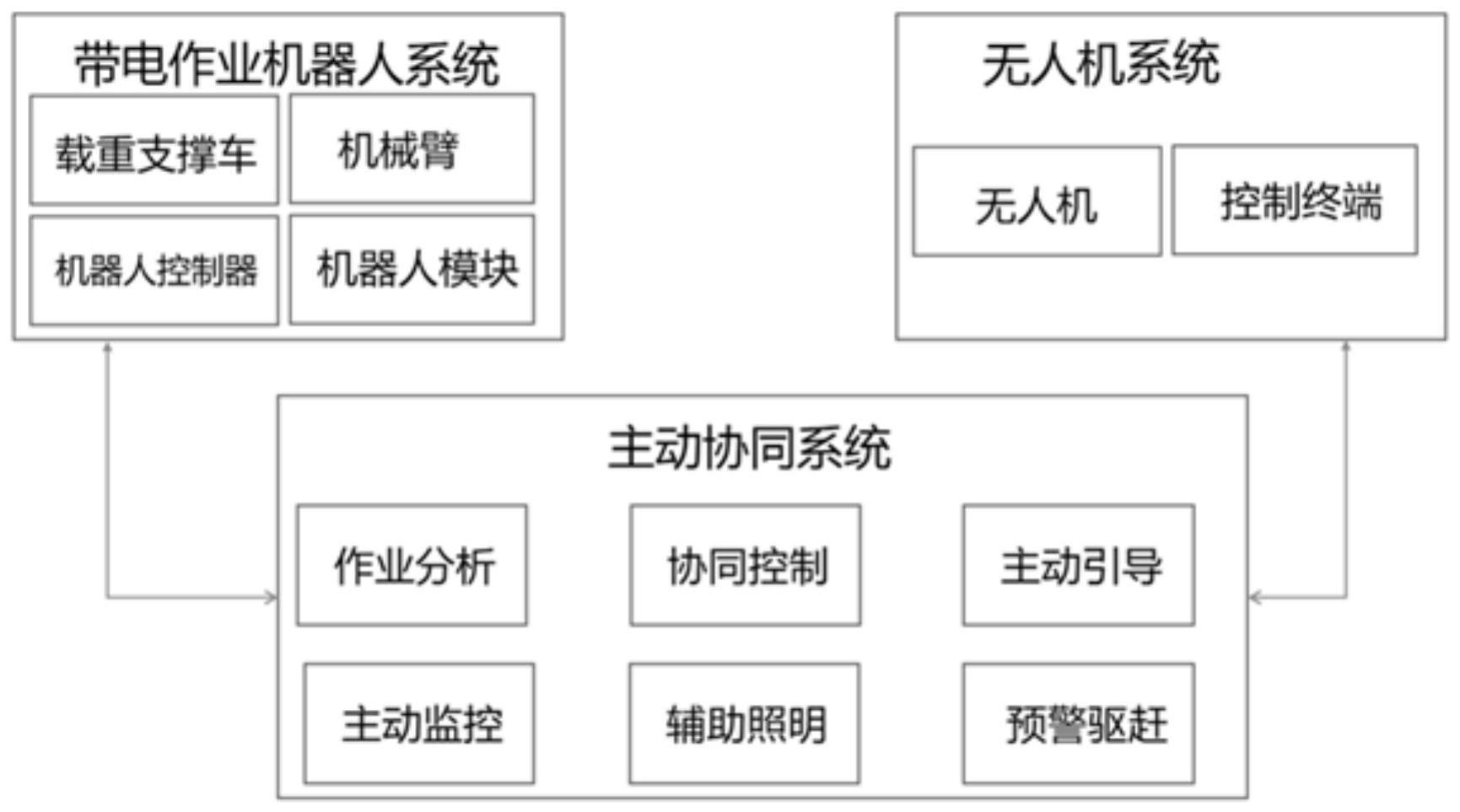
4、包括无人机系统和主动协同系统,带电作业机器人系统与无人机系统通过主动协同系统连接;无人机系统用于为带电作业机器人系统作业提供辅助功能,主动协同系统用于协同无人机系统与带电作业机器人系统之间的信息共享和协同控制;
5、无人机系统包括无人机与控制终端,无人机与控制终端无线连接;无人机包括无人机本体、执行模块和信息采集模块,执行模块和信息采集模块搭载在无人机本体上,无人机控制终端与带电作业机器人系统无线连接。
6、优选的技术方案中,所述执行模块包括喊话器、照明灯和激光发射器,所述信息采集模块包括摄像头、激光传感器和超声传感器。
7、优选的技术方案中,所述主动协同系统包括作业分析评价模块、协同控制模块、主动引导模块、主动监控模块、辅助照明模块和预警驱赶模块;
8、作业评价模块,用于将带电作业机器人作业全过程与预设的作业指导书进行比对分析,得出作业报告评价;
9、协同控制模块,用于当存在作业危险或施工质量差情况发生时,协同无人机对带电作业机器人进行控制;当作业风险解除或工作质量为好时,无人机放弃带电作业机器人的控制;还用于当电作业机器人视觉不足时,协同带电作业机器人获取无人机控制权,增加电作业机器人的视觉;
10、主动引导模块,用于当带电作业机器人无法准确到达预定工作位置时,通过坐标定位引导方法或激光引导方法使得带电作业机器人准确到达预定工作位置;
11、主动监控模块,用于当带电作业机器人作业的施工质量需要识别或紧急情况发生后需要监控时,接收带电作业机器发送的专项监控指令,向无人机系统的控制终端发送专项监控指令,控制无人机到达预定位置进行监控;
12、辅助照明模块,用于当带电作业机器人的作业区域的光线不足时,辅助照明模块将辅助照明指令发送给无人机控制终端,无人机控制终端控制无人机飞到作业位置上空并打开无人机的照明灯;
13、预警驱赶模块,用于当带电作业机器人的作业区域在异常侵入情况时,对异常侵入情况进行判别,当确认为异常侵入,通过无人机执行模块的喊话器执行预警驱赶。
14、本发明与现有技术相比,具有如下优点和有益效果:
15、本发明提供一种带电作业机器人系统的无人机辅助系统,通过主动协同系统可以协同无人机系统与带电作业机器人系统之间的信息共享和协同控制,通过无人机系统的信息采集模块和执行模块可以灵活地全景视角支撑带电作业机器人的辅助决策,提升带电作业机器人的工作效率。
技术特征:
1.一种带电作业机器人系统的无人机辅助系统,其特征在于,包括无人机系统和主动协同系统,带电作业机器人系统与无人机系统通过主动协同系统连接;无人机系统用于为带电作业机器人系统作业提供辅助功能,主动协同系统用于协同无人机系统与带电作业机器人系统之间的信息共享和协同控制;
2.根据权利要求1所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述执行模块包括喊话器、照明灯和激光发射器,所述信息采集模块包括摄像头、激光传感器和超声传感器。
3.根据权利要求2所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述带电作业机器人系统包括载重支撑车、机械臂、机器人控制器和机器人模块,机器人模块包括绝缘斗和带电作业机器人,带电作业机器人设在绝缘斗上,绝缘斗通过机械臂安装在载重支撑车上;
4.根据权利要求3所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述主动协同系统包括作业分析评价模块、协同控制模块、主动引导模块、主动监控模块、辅助照明模块和预警驱赶模块;
5.根据权利要求4所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述作业评价模块用于将带电作业机器人作业全过程与预设的作业指导书进行比对分析,包括:
6.根据权利要求4所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述协同控制模块用于当存在作业危险或施工质量差情况发生时,协同无人机对带电作业机器人进行控制,包括:
7.根据权利要求4所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述协同控制模块用于当电作业机器人视觉不足时,协同带电作业机器人获取无人机控制权,增加电作业机器人的视觉,包括:
8.根据权利要求4所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述主动引导模块用于通过坐标定位引导方法使得带电作业机器人准确到达预定工作位置,包括:
9.根据权利要求4所述的一种带电作业机器人系统的无人机辅助系统,其特征在于,所述主动引导模块用于通过激光引导方法使得带电作业机器人准确到达预定工作位置,包括:
技术总结
本发明涉及电力技术领域,为一种带电作业机器人系统的无人机辅助系统,该系统包括无人机系统和主动协同系统,带电作业机器人系统与无人机系统通过主动协同系统连接;无人机系统用于为带电作业机器人系统作业提供辅助功能,主动协同系统用于协同无人机系统与带电作业机器人系统之间的信息共享和协同控制;无人机系统包括无人机与控制终端,无人机与控制终端无线连接;无人机包括无人机本体、执行模块和信息采集模块,执行模块和信息采集模块搭载在无人机本体上,无人机控制终端与带电作业机器人系统无线连接。本发明可以灵活地全景视角支撑带电作业机器人的辅助决策,提升带电作业机器人的工作效率。
技术研发人员:王喜军,王毅,曲烽瑞,王府,李梦阳
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!