深空天体科学探测器行为验证方法及装置与流程
本发明涉及科学探测器,尤指一种深空天体科学探测器行为验证方法及装置。
背景技术:
1、深空天体探测器由运行在行星轨道的中继通信装置和行走于行星表面的科学探测器组成。科学探测器在经历释放分离阶段后抵达行星表面,而后开展巡视探测阶段工作,这一阶段地面控制团队需要采用深空遥操作技术对科学探测器进行控制。遥操作控制团队需结合车体自身的设计原则、性能和当前位置、环境地图,及光照、星历、能源状态、天气等信息,为科学探测器制定探测计划,将科学探测行为转换为所需的工程行为。与月面巡视探测不同,深空科学探测器对地通信能力较低、传输时延大,状态无法实时反馈给控制团队。因而,需结合行星表面天气环境情况、探测器实际工作状态和测控链路情况,以行星日为最小执行单元,提前规划并生成指令序列、控制参数并上注,指令时间到达后探测器自主执行预期行为,以达成探测目标。
2、为验证控制策略的有效性与安全性,控制团队应该在指令上注前通过地面仿真验证装置对控制参数进行解析,对控制行为进行预测和验证。由于此前的遥操作任务以月球表面为主,科学探测器对地传输时延低、控制实时性强、状态反馈及时,工程方的控制行为验证一般结合已有实时遥测状态进行,且不支持包含复合操作的任务级指令。产品设计方则侧重于对车体各类机构执行控制行为的有效性进行验证,无法结合实际行星表面环境及工程状态进行验证。
3、目前,现有技术针对近地星球科学探测器状态仿真,无法针对深空环境中大时延环境下真实控制指令及注入引起的探测器过程进行验证。针对中继通信能力和科学探测器自身通信能力动态变化且无法实时获取的情况,现有技术无法建立动态的交互模型,对控制过程的通信能力进行预估。
技术实现思路
1、针对现有技术中存在的问题,本发明实施例的主要目的在于提供一种深空天体科学探测器行为验证方法及装置,实现对科学探测器行为的准确预测。
2、为了实现上述目的,本发明实施例提供一种深空天体科学探测器行为验证方法,方法包括:
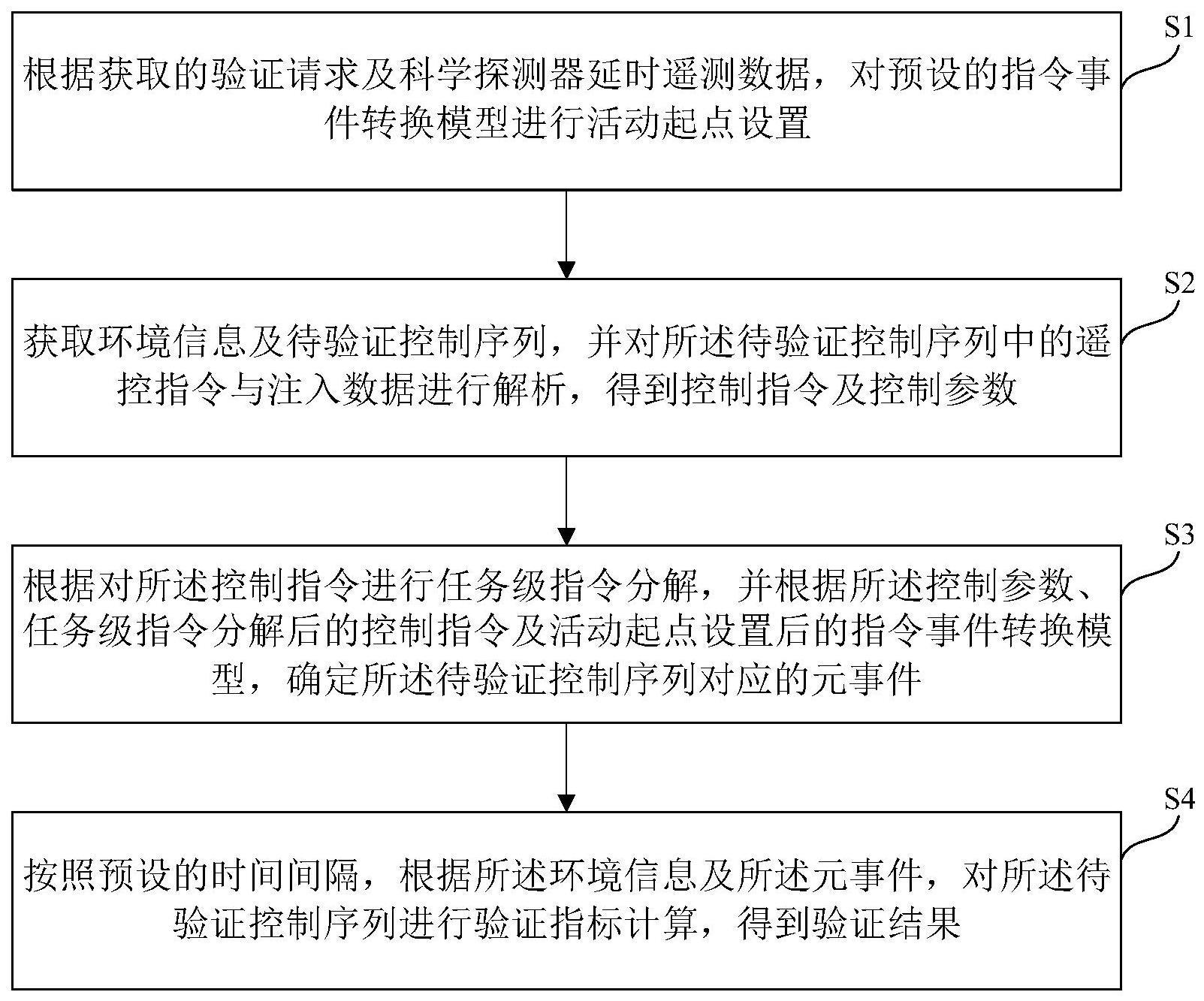
3、根据获取的验证请求及科学探测器延时遥测数据,对预设的指令事件转换模型进行活动起点设置;
4、获取环境信息及待验证控制序列,并对待验证控制序列中的遥控指令与注入数据进行解析,得到控制指令及控制参数;
5、根据对控制指令进行任务级指令分解,并根据所述控制参数、任务级指令分解后的控制指令及活动起点设置后的指令事件转换模型,确定待验证控制序列对应的元事件;
6、按照预设的时间间隔,根据环境信息及所述元事件,对待验证控制序列进行验证指标计算,得到验证结果。
7、可选的,在本发明一实施例中,方法还包括:
8、根据科学探测器的当前工作坐标,确定科学探测器在行星固连坐标系下的坐标,以及科学探测器对应的当前站点在其着陆坐标系下的位置;
9、根据坐标及所述位置,对科学探测器的能耗进行计算,并更新环境参数及通信码速率;
10、根据控制参数及预设的科学探测器机构运行模型,对科学探测器进行机构状态信息更新。
11、可选的,在本发明一实施例中,根据环境信息及所述元事件,对待验证控制序列进行验证指标计算,得到验证结果包括:
12、根据环境信息及元事件,对待验证控制序列进行路径安全性验证、太阳翼转动约束验证、桅杆运动约束验证及定向天线机构运动约束验证,并分别得到验证结果。
13、可选的,在本发明一实施例中,根据环境信息及所述元事件,对待验证控制序列进行路径安全性验证包括:
14、根据环境信息中的数字高程模型图,利用拟合平面法计算数字高程模型图中的平均坡度及最大坡度,并根据平均坡度及最大坡度,确定地形起伏度;
15、根据环境信息中的数字高程模型图,利用元事件进行地形障碍物识别,确定科学探测器与障碍物之间的距离,并将地形起伏度与所述距离作为待验证控制序列对应的路径安全性验证结果。
16、可选的,在本发明一实施例中,根据环境信息及元事件,对待验证控制序列进行太阳翼转动约束验证包括:
17、根据环境信息中的数字高程模型图、元事件、科学探测器的当前姿态及当前位置,计算太阳翼与地形间的最短距离,并将最短距离作为待验证控制序列对应的太阳翼转动约束验证结果。
18、本发明实施例还提供一种深空天体科学探测器行为验证装置,装置包括:
19、活动起点模块,用于根据获取的验证请求及科学探测器延时遥测数据,对预设的指令事件转换模型进行活动起点设置;
20、控制指令模块,用于获取环境信息及待验证控制序列,并对待验证控制序列中的遥控指令与注入数据进行解析,得到控制指令及控制参数;
21、元事件模块,用于根据对控制指令进行任务级指令分解,并根据控制参数、任务级指令分解后的控制指令及活动起点设置后的指令事件转换模型,确定待验证控制序列对应的元事件;
22、验证结果模块,用于按照预设的时间间隔,根据环境信息及元事件,对待验证控制序列进行验证指标计算,得到验证结果。
23、可选的,在本发明一实施例中,装置还包括:
24、坐标位置模块,用于根据科学探测器的当前工作坐标,确定科学探测器在行星固连坐标系下的坐标,以及科学探测器对应的当前站点在其着陆坐标系下的位置;
25、参数更新模块,用于根据坐标及位置,对科学探测器的能耗进行计算,并更新环境参数及通信码速率;
26、信息更新模块,用于根据控制参数及预设的科学探测器机构运行模型,对科学探测器进行机构状态信息更新。
27、可选的,在本发明一实施例中,验证结果模块还用于根据环境信息及元事件,对待验证控制序列进行路径安全性验证、太阳翼转动约束验证、桅杆运动约束验证及定向天线机构运动约束验证,并分别得到验证结果。
28、可选的,在本发明一实施例中,验证结果模块包括:
29、地形起伏度单元,用于根据环境信息中的数字高程模型图,利用拟合平面法计算数字高程模型图中的平均坡度及最大坡度,并根据平均坡度及最大坡度,确定地形起伏度;
30、安全性验证单元,用于根据环境信息中的数字高程模型图,利用元事件进行地形障碍物识别,确定科学探测器与障碍物之间的距离,并将地形起伏度与距离作为待验证控制序列对应的路径安全性验证结果。
31、可选的,在本发明一实施例中,验证结果模块还用于根据环境信息中的数字高程模型图、元事件、科学探测器的当前姿态及当前位置,计算太阳翼与地形间的最短距离,并将最短距离作为待验证控制序列对应的太阳翼转动约束验证结果。
32、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行所述程序时实现上述方法。
33、本发明还提供一种计算机可读存储介质,计算机可读存储介质存储有由计算机执行上述方法的计算机程序。
34、本发明还提供一种计算机程序产品,包括计算机程序/指令,计算机程序/指令被处理器执行时实现上述方法的步骤。
35、本发明针对深空环境中大时延环境下真实控制指令及注入引起的科学探测器过程进行验证,利用控制参数进行深空科学探测器行为预判,实现深空、大时延、科学探测器实时状态无法获取情况下,科学探测器行走过程中的准确分析。
- 还没有人留言评论。精彩留言会获得点赞!