智能作业设备作业方法、装置、设备及存储介质与流程
本申请涉及智能作业技术,尤其涉及一种智能作业设备作业方法、装置、设备及存储介质。
背景技术:
1、割草机是一种用于修剪草坪、植被等的园林工具,通常包括自走组件、割刀组件以及动力源,该动力源可以是汽油机、电池包等。割草机能够沿着预设的规划路径自行对草坪进行割草作业,该预设的规划路径是根据草坪的地图,综合考虑割草机的运行时间、转向次数、割草机特性等做出的相对最优策略。在草坪地图不变时,该预设的规划路径通常也是不变的。然而,割草机在同一片草坪上,一般需要根据该预设的规划路径进行长期作业、多次作业。
2、因此,割草机按照同一规划路径多次作业后,草地上会留下压痕,该作业方式无法满足实际使用需求。
技术实现思路
1、本申请提供一种智能作业设备作业方法、装置、设备及存储介质,用以解决割草机按照同一规划路径多次作业后,草地上会留下压痕,该作业方式无法满足实际使用需求的问题。
2、第一方面,本申请提供一种智能作业设备作业方法,所述智能作业设备单次作业任务采用一个作业方向进行作业,所述方法包括:
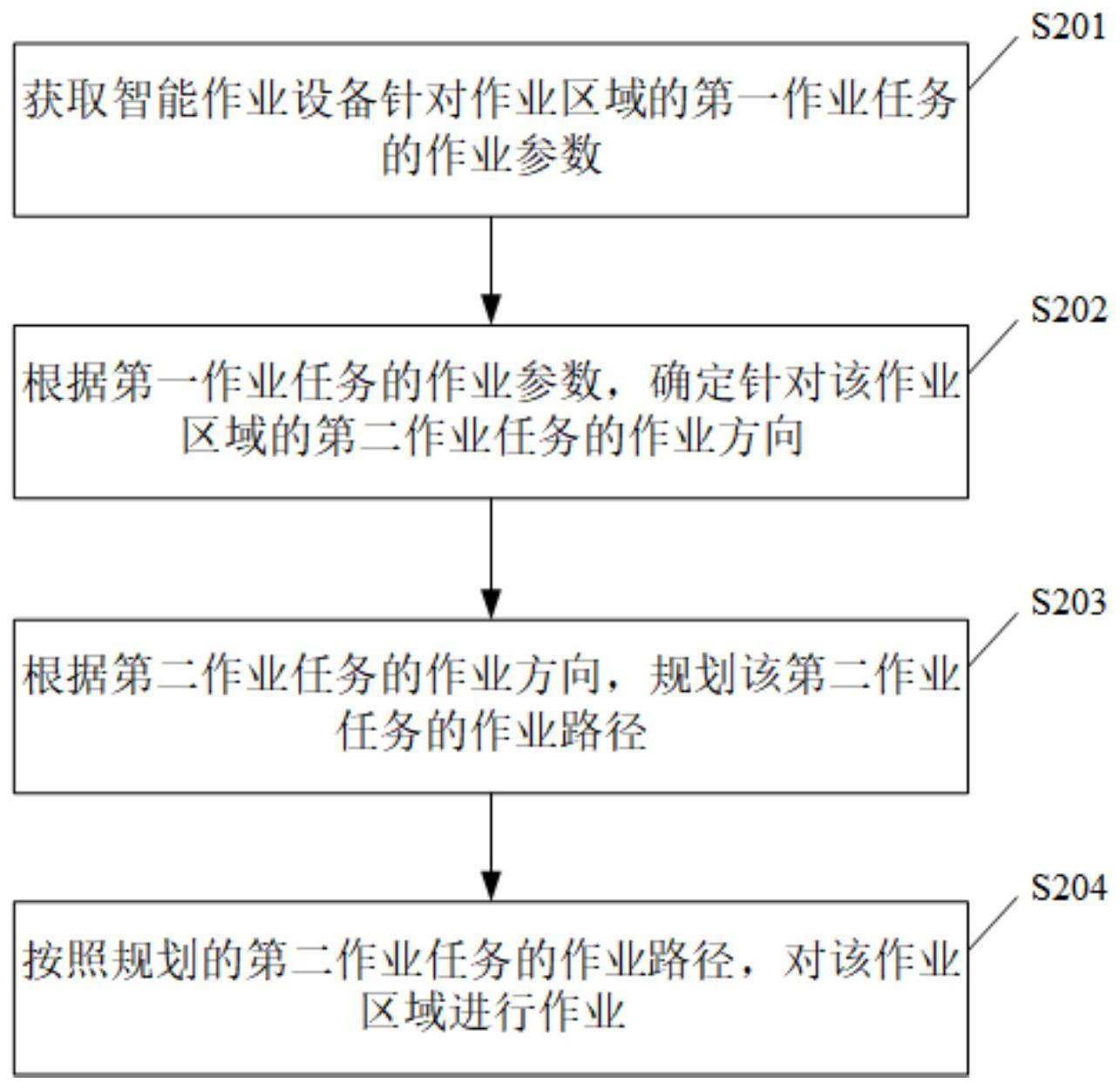
3、获取所述智能作业设备针对作业区域的第一作业任务的作业参数,所述作业参数包括:作业方向;
4、根据所述第一作业任务的作业参数,确定针对所述作业区域的第二作业任务的作业方向,所述第一作业任务是所述第二作业任务在所述作业区域的前一次作业任务;
5、根据所述第二作业任务的作业方向,规划所述第二作业任务的作业路径;
6、按照规划的所述第二作业任务的作业路径,对所述作业区域进行作业。
7、可选的,所述作业参数还包括:所述第一作业任务的完成情况;
8、所述根据所述第一作业任务的作业参数,确定针对所述作业区域的第二作业任务的作业方向,包括:
9、判断所述第一作业任务是否完成所述作业区域内的作业;
10、若所述第一作业任务未完成所述作业区域内的作业,则将所述第一作业任务的作业方向作为所述第二作业任务的作业方向;
11、若所述第一作业任务完成所述作业区域内的作业,则根据所述第一作业任务的作业方向,确定所述第二作业任务的作业方向。
12、可选的,所述根据所述第一作业任务的作业方向,确定所述第二作业任务的作业方向,包括:
13、根据所述第一作业任务的作业方向,确定所述第二作业任务的方向调整参数;
14、根据所述第二作业任务的方向调整参数,对目标作业方向进行方向调整,得到所述第二作业任务的作业方向,以使所述第一作业任务的作业方向与所述第二作业任务的作业方向不同。
15、可选的,所述智能作业设备中存储有n个方向调整参数,所述n为大于1的整数;所述根据所述第一作业任务的作业方向,确定所述第二作业任务的方向调整参数,包括:
16、根据所述第一作业任务的作业方向,从所述n个方向调整参数中,确定所述第二作业任务的方向调整参数。
17、可选的,所述根据所述第二作业任务的作业方向,规划所述第二作业任务的作业路径,包括:
18、获取所述作业区域的地图;
19、根据所述第二作业行为的作业方向,以及,所述作业区域的地图,计算所述第二作业行为的作业路径。
20、可选的,所述获取所述智能作业设备针对作业区域的第一作业任务的作业参数,包括:
21、接收所述第二作业任务的启动指令;
22、判断所述第二作业任务是否为针对所述作业区域首次执行的作业任务;
23、若所述第二作业任务非首次执行的作业任务,则获取所述智能作业设备针对作业区域的第一作业任务的作业参数。
24、可选的,所述判断所述第二作业任务是否为针对所述作业区域首次执行的作业任务之后,所述方法还包括:
25、若所述第二作业任务为首次执行的作业任务,则获取所述作业区域的地图;
26、根据所述作业区域的地图,以及,预设的路径规划策略,规划所述第二作业任务的作业路径;
27、按照规划的所述第二作业任务的作业路径,对所述作业区域进行作业所述第二作业行为的作业路径。
28、第二方面,本申请提供一种智能作业设备作业装置,所述智能作业设备单次作业任务采用一个作业方向进行作业,所述装置包括:
29、获取模块,用于获取所述智能作业设备针对作业区域的第一作业任务的作业参数,所述作业参数包括:作业方向;
30、处理模块,用于根据所述第一作业任务的作业参数,确定针对所述作业区域的第二作业任务的作业方向,所述第一作业任务是所述第二作业任务在所述作业区域的前一次作业任务;根据所述第二作业任务的作业方向,规划所述第二作业任务的作业路径;
31、控制模块,用于按照规划的所述第二作业任务的作业路径,对所述作业区域进行作业。
32、第三方面,本申请提供一种电子设备,包括:处理器,通信接口以及存储器,所述处理器分别与所述通信接口和所述存储器通信连接;
33、所述存储器存储计算机执行指令;
34、所述通信接口与外部设备进行通信交互;
35、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面中任一项所述的方法。
36、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面中任一项所述的智能作业设备作业方法。
37、本申请提供的智能作业设备作业方法、装置、设备及存储介质,能够根据智能作业设备在第一作业任务运行时的作业方向,自适应的调整用于该智能作业设备下一次作业任务的作业方向,根据该作业方向将下一次作业任务的作业路径调整为与第一作业任务不同的作业路径,从而避免智能作业设备在多次作业时仅沿着固定的作业路径行走,减轻该智能作业设备在作业区域上反复碾压导致该作业区域上形成压痕的问题,从而满足作业的实际需要。
技术特征:
1.一种智能作业设备作业方法,其特征在于,所述智能作业设备单次作业任务采用一个作业方向进行作业,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述作业参数还包括:所述第一作业任务的完成情况;
3.根据权利要求2所述的方法,其特征在于,所述根据所述第一作业任务的作业方向,确定所述第二作业任务的作业方向,包括:
4.根据权利要求3所述的方法,其特征在于,所述智能作业设备中存储有n个方向调整参数,所述n为大于1的整数;所述根据所述第一作业任务的作业方向,确定所述第二作业任务的方向调整参数,包括:
5.根据权利要求1-4任一项所述的方法,其特征在于,所述根据所述第二作业任务的作业方向,规划所述第二作业任务的作业路径,包括:
6.根据权利要求1-4任一项所述的方法,其特征在于,所述获取所述智能作业设备针对作业区域的第一作业任务的作业参数,包括:
7.根据权利要求6所述的方法,其特征在于,所述判断所述第二作业任务是否为针对所述作业区域首次执行的作业任务之后,所述方法还包括:
8.一种智能作业设备作业装置,其特征在于,所述智能作业设备单次作业任务采用一个作业方向进行作业,所述装置包括:
9.一种电子设备,其特征在于,包括:处理器,通信接口以及存储器,所述处理器分别与所述通信接口和所述存储器通信连接;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至7任一项所述的智能作业设备作业方法。
技术总结
本申请提供一种智能作业设备作业方法、装置、设备及存储介质。该方法包括:获取智能作业设备针对作业区域的第一作业任务的作业参数,作业参数包括:作业方向。根据第一作业任务的作业参数,确定针对作业区域的第二作业任务的作业方向,第一作业任务是第二作业任务在作业区域的前一次作业任务。根据第二作业任务的作业方向,规划第二作业任务的作业路径。按照规划的第二作业任务的作业路径,对作业区域进行作业。本申请的方法,避免了智能作业设备在多次作业时仅沿着固定的作业路径行走,减轻了该智能作业设备在作业区域上反复碾压导致该作业区域上形成压痕的问题,从而满足了作业的实际需要。
技术研发人员:苏天杨,林德淦,张少光
受保护的技术使用者:未岚大陆(北京)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!