一种自动驾驶汽车的刹车标定控制方法、装置及相关设备与流程
本技术涉及自动驾驶,更具体地说,是涉及一种自动驾驶汽车的刹车标定控制方法、装置及相关设备。
背景技术:
1、刹车标定是每一辆自动驾驶汽车出厂前的一项重要工作,其旨在将自动驾驶车辆的减速度映射成实际车辆上的刹车踏板的开度。通常地,自动驾驶汽车的刹车标定过程需要操作员在实际路面上对车辆多个不同的刹车踏板开度的数据进行录制,从而得到初步的刹车标定数据,当中有一套细致严格的执行标准,若操作员由于人为疏忽触犯了其中某些规定,会导致刹车标定数据无效,从而需要所有刹车标定数据重新开始录制,导致花费相当多的时间,工作效率难以提升。
技术实现思路
1、有鉴于此,本技术提供了一种自动驾驶汽车的刹车标定控制方法、装置及相关设备,以解决至少一个上述提出的技术问题。
2、为实现上述目的,本技术第一方面提供了一种自动驾驶汽车的刹车标定控制方法,包括:
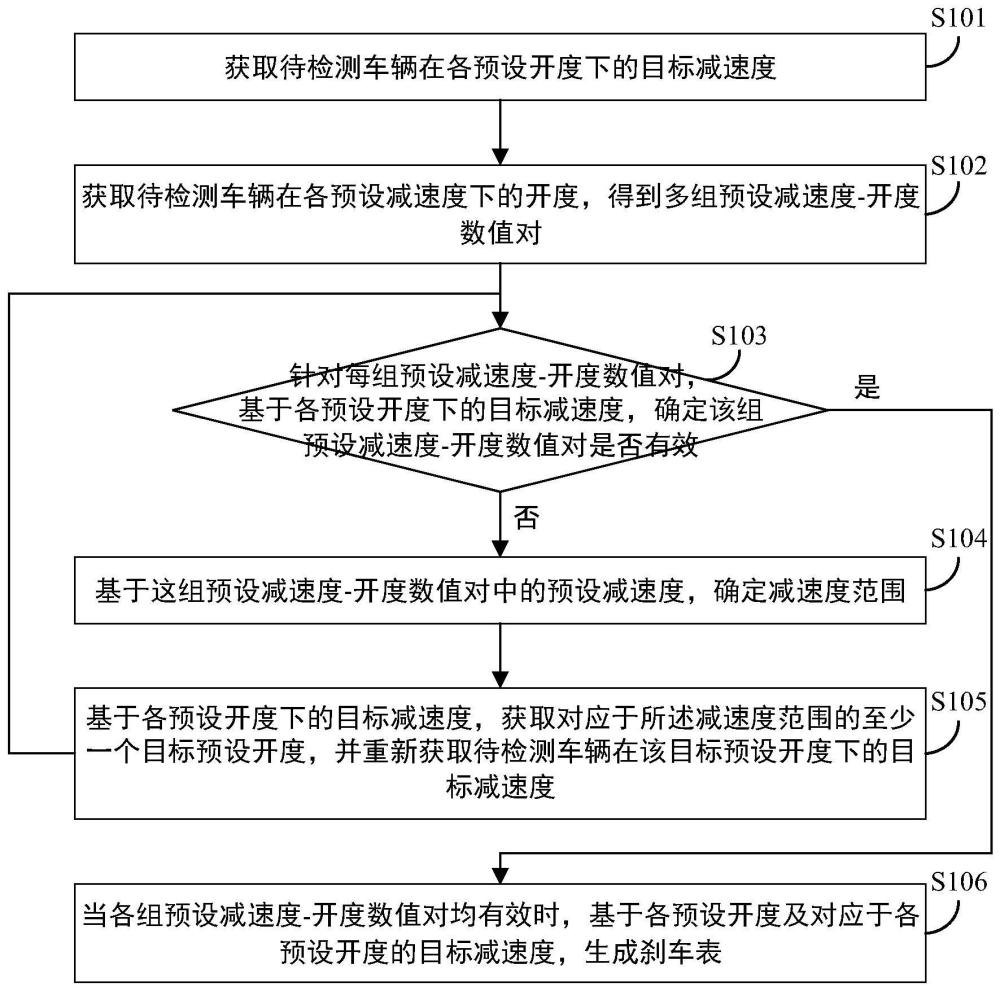
3、获取待检测车辆在各预设开度下的目标减速度,其中,对应于第一预设开度的目标减速度大于对应于第二预设开度的目标减速度,所述第一预设开度大于所述第二预设开度;
4、获取待检测车辆在各预设减速度下的开度,得到多组预设减速度-开度数值对;
5、针对每组预设减速度-开度数值对,基于各预设开度下的目标减速度,确定所述组预设减速度-开度数值对是否有效;
6、若否,基于所述组预设减速度-开度数值对中的预设减速度,确定减速度范围;
7、基于各预设开度下的目标减速度,获取对应于所述减速度范围的至少一个目标预设开度,并重新获取待检测车辆在所述目标预设开度下的目标减速度,以及返回执行针对每组预设减速度-开度数值对,基于各预设开度下的目标减速度,确定所述组预设减速度-开度数值对是否有效的步骤;
8、当各组预设减速度-开度数值对均有效时,基于各预设开度及对应于各预设开度的目标减速度,生成刹车表。
9、优选地,获取待检测车辆在各预设开度下的目标减速度的过程,包括:
10、针对每一预设开度,获取待检测车辆在所述预设开度下的减速度;
11、基于各预设开度以及对应于各预设开度的减速度,生成预设开度-减速度曲线,并判断所述预设开度-减速度曲线是否单调递增;
12、若否,获取所述预设开度-减速度曲线的拐点,并获取所述拐点对应的预设开度,以及返回执行获取待检测车辆在所述预设开度下的减速度的步骤;
13、若是,将对应于每一预设开度的减速度确定为对应于所述预设开度的目标减速度。
14、优选地,针对每一预设开度,获取待检测车辆在所述预设开度下的减速度的过程,包括:
15、获取待检测车辆在每一预设开度下的录制数据;
16、针对每一预设开度,判断所述预设开度下的录制数据是否符合预设规范;
17、若否,重新获取所述待检测车辆在所述预设开度下的录制数据,并返回执行判断所述预设开度下的录制数据是否符合预设规范的步骤;
18、当各预设开度下的录制数据均符合预设规范时,基于每一预设开度下的录制数据,获取所述待检测车辆在所述预设开度下的减速度。
19、优选地,判断所述预设开度下的录制数据是否符合预设规范的过程,包括:
20、判断所述录制数据是否包含依次加速、减速以及减速到预设速度的录制过程,得到第一判断结果;
21、判断所述录制数据录制过程中,是否存在刹车接管或油门接管,得到第二判断结果;
22、判断所述录制数据录制过程中,路面的坡度是否小于预设坡度阈值,得到第三判断结果;
23、判断所述录制数据是否包含预设的各步骤,得到第四判断结果;
24、若所述第一判断结果、所述第三判断结果以及所述第四判断结果均为是,且所述第二判断结果为否,则确定所述录制数据符合预设规范。
25、优选地,基于每一预设开度下的录制数据,获取所述待检测车辆在所述预设开度下的减速度的过程,包括:
26、基于每一预设开度下的录制数据,获取所述待检测车辆在所述预设开度下的候选减速度以及路面的坡度;
27、将所述候选减速度减去坡度对所述候选减速度产生的分量,得到所述待检测车辆在所述预设开度下的减速度。
28、优选地,在重新获取待检测车辆在所述目标预设开度下的目标减速度之前,还包括:
29、统计重新获取待检测车辆在所述目标预设开度下的目标减速度这一步骤的执行次数;
30、若所述执行次数大于预设值,返回执行获取待检测车辆在各预设开度下的目标减速度的步骤。
31、优选地,基于各预设开度下的目标减速度,确定所述组预设减速度-开度数值对是否有效的过程,包括:
32、基于各预设开度下的目标减速度,拟合得到对应于预设减速度的预估开度,其中,所述预设减速度为所述组预设减速度-开度数值对中的预设减速度;
33、计算所述预估开度和开度的误差,其中,所述开度为所述组预设减速度-开度数值对中的开度;
34、若所述误差在预设的误差范围之内,确定所述组预设减速度-开度数值对有效;
35、若所述误差在预设的误差范围之外,确定所述组预设减速度-开度数值对无效。
36、本技术第二方面提供了一种自动驾驶汽车的刹车标定控制装置,包括:
37、标定数据获取单元,用于获取待检测车辆在各预设开度下的目标减速度,其中,对应于第一预设开度的目标减速度大于对应于第二预设开度的目标减速度,所述第一预设开度大于所述第二预设开度;
38、验证数据获取单元,用于获取待检测车辆在各预设减速度下的开度,得到多组预设减速度-开度数值对;
39、标定数据验证单元,用于针对每组预设减速度-开度数值对,基于各预设开度下的目标减速度,确定所述组预设减速度-开度数值对是否有效;
40、重测范围确定单元,用于当所述标定数据验证单元确定所述组预设减速度-开度数值对无效时,基于所述组预设减速度-开度数值对中的预设减速度,确定减速度范围;
41、单步数据获取单元,用于基于各预设开度下的目标减速度,获取对应于所述减速度范围的至少一个目标预设开度,并重新获取待检测车辆在所述目标预设开度下的目标减速度,以及返回执行所述标定数据验证单元;
42、刹车表确定单元,用于当各组预设减速度-开度数值对均有效时,基于各预设开度及对应于各预设开度的目标减速度,生成刹车表。
43、本技术第三方面提供了一种自动驾驶汽车的刹车标定控制设备,包括:存储器和处理器;
44、所述存储器,用于存储程序;
45、所述处理器,用于执行所述程序,实现上述的自动驾驶汽车的刹车标定控制方法的各个步骤。
46、本技术第四方面提供了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上述的自动驾驶汽车的刹车标定控制方法的各个步骤。
47、经由上述的技术方案可知,本技术首先获取待检测车辆在各预设开度下的目标减速度,从而得到标定数据,其中,对应于第一预设开度的目标减速度大于对应于第二预设开度的目标减速度,所述第一预设开度大于所述第二预设开度,即随着预设开度的增加,对应于预设开度的减速度也增加,整体呈现单调递增。可以理解的是,若出现某些数据点,导致标定数据并非单调递增,则需要重新获取这些异常数据点的数据,以及时纠正错误。然后,获取待检测车辆在各预设减速度下的开度,得到多组预设减速度-开度数值对,其中,这些预设减速度-开度数值对用于对前述的标定数据进行验证。接着,针对每组预设减速度-开度数值对,基于各预设开度下的目标减速度,确定所述组预设减速度-开度数值对是否有效。若确定所述组预设减速度-开度数值对无效,则基于所述组预设减速度-开度数值对中的预设减速度,确定减速度范围。可以理解的是,所述减速度范围为需要重新标定的减速度范围,即,目标减速度落在所述减速度范围内的各预设开度均需要重新标定。基于各预设开度下的目标减速度,获取对应于所述减速度范围的至少一个目标预设开度,并重新获取待检测车辆在所述目标预设开度下的目标减速度,并重新对其进行验证,即,返回执行针对每组预设减速度-开度数值对,基于各预设开度下的目标减速度,确定所述组预设减速度-开度数值对是否有效的步骤。最后,当各组预设减速度-开度数值对均有效时,基于各预设开度及对应于各预设开度的目标减速度,生成刹车表。本技术从单调性以及拟合度对标定数据进行逐条校验,当发现问题时返回重新执行某一条数据的标定,提高了处理效率,同时经过多级校验提升了标定数据的合理性,提高了标定数据的通过率。
- 还没有人留言评论。精彩留言会获得点赞!