移动方向的调整方法、装置、设备及存储介质与流程
本技术涉及机器人,尤其涉及一种移动方向的调整方法、装置、设备及存储介质。
背景技术:
1、锅炉水冷壁管上的缺陷(比如,结焦、破损、腐蚀及磨损等),会影响到火力发电厂的稳定运行,所以对水冷壁管的缺陷检测变得尤为重要。传统水冷壁管的缺陷检测中,一般依靠人工检测,不仅检测成本高,且检测作业的危险系数较高。随着人工智能和机器人技术的发展,目前可以采用爬壁机器人替代人工执行对水冷壁管的缺陷检测任务。
2、然而,爬壁机器人的爬行运动采用轮式磁吸方式,移动方向受磁吸面影响较大,而水冷壁管的表面凹凸不平,常存在焦渣、铁屑等污染物,且水冷壁管可能存在胀粗、裂纹等缺陷,这会导致爬壁机器人在爬行过程中移动方向跑偏,无法按照事先规划的导航路线完成缺陷检测任务。因此,如何对爬壁机器人在爬行过程中的移动方向进行及时矫正,成为了亟待解决的技术问题。
技术实现思路
1、本技术提供一种移动方向的调整方法、装置、设备及存储介质,可以实现对爬壁机器人在爬行过程中的移动方向进行及时矫正。
2、为达到上述目的,本技术采用如下技术方案:
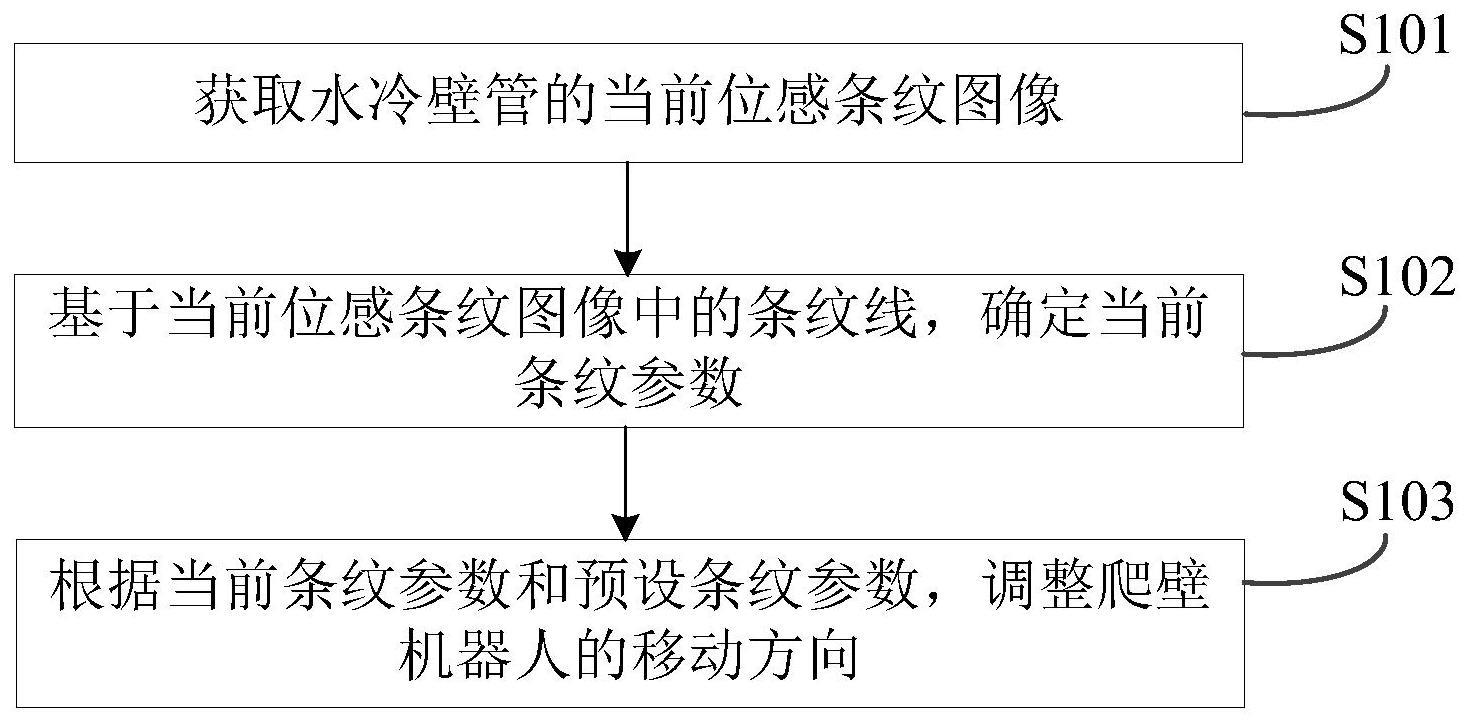
3、第一方面,本技术提供一种移动方向的调整方法,包括:步骤a:获取水冷壁管的当前位感条纹图像;当前位感条纹图像为,爬壁机器人在水冷壁管上移动的过程中采集的图像;当前位感条纹图像中包含多条平行排布的条纹线;步骤b:基于当前位感条纹图像中的条纹线,确定当前条纹参数;当前条纹参数,用于表征当前位感条纹图像中的条纹线相对于预设方向的倾斜程度;步骤c:根据当前条纹参数和预设条纹参数,调整爬壁机器人的移动方向;预设条纹参数,用于表征模板位感条纹图像中的条纹线相对于预设方向的倾斜程度。
4、本技术提供的技术方案中,爬壁机器人在水冷壁管上移动的过程中,可以采集当前位感条纹图像。水冷壁管的管道铺设通常是按一定规则铺设,各管道之间相互平行,所以采集到的当前位感条纹图像中可以包含有多条平行排布的条纹线。本技术可以基于当前位感条纹图像中的条纹线确定出当前条纹参数,然后根据该当前条纹参数与预设条纹参数,对爬壁机器人的移动方向进行调整。由于当前条纹参数可以表征当前位感条纹图像中的条纹线相对于预设方向的倾斜程度,预设条纹参数可以表征模板位感条纹图像中的条纹线相对于预设方向的倾斜程度,所以,根据当前条纹参数与预设条纹参数,可以实现对爬壁机器人的当前移动方向的定位。而爬壁机器人的爬行路线一般是事先规划好的,那么爬壁机器人的导航方向也是确定的,所以,基于当前条纹参数和预设条纹参数,可以得到爬壁机器人的当前移动方向与导航方向的方向偏差,这样,就可以根据该方向偏差及时对爬壁机器人的当前移动方向进行矫正。可以看出,本技术提供的技术方案,通过对比当前位感条纹图像对应的当前条纹参数和模板位感条纹图像对应的预设条纹参数,可以实现对爬壁机器人在爬行过程中的移动方向进行及时矫正。
5、可选的,在一种可能的设计方式中,当前条纹参数为,当前位感条纹图像中的条纹线相对于预设方向的第一斜率;预设条纹参数为,模板位感条纹图像中的条纹线相对于预设方向的第二斜率。
6、可选的,在另一种可能的设计方式中,上述“根据当前条纹参数和预设条纹参数,调整爬壁机器人的移动方向”可以包括:
7、根据第一斜率和第二斜率确定当前偏移角;
8、若确定当前偏移角与偏移角阈值满足预设条件,则基于当前偏移角调整爬壁机器人的移动方向;
9、若确定当前偏移角与偏移角阈值不满足预设条件,则控制爬壁机器人保持当前的移动方向。
10、可选的,在另一种可能的设计方式中,上述“基于当前位感条纹图像中的条纹线,确定当前条纹参数”可以包括:
11、对当前位感条纹图像进行预处理,得到目标位感条纹图像;
12、基于预设划分规则将目标位感条纹图像划分为n个位感条纹分区;n为大于1的正整数;
13、基于位感条纹分区中的条纹线相对于预设方向的斜率,确定第一斜率。
14、可选的,在另一种可能的设计方式中,上述“基于位感条纹分区中的条纹线相对于预设方向的斜率,确定第一斜率”可以包括:
15、在n个位感条纹分区中的每个位感条纹分区的预设位置处添加基准圆;其中,基准圆的直径小于预设宽度;
16、基于每个位感条纹分区中的条纹线与对应的基准圆的交点数,从n个位感条纹分区中确定出候选位感条纹分区;候选位感条纹分区中的条纹线与对应的基准圆的交点数为2;
17、基于候选位感条纹分区中的条纹线与对应的基准圆的第一交点的第一坐标,以及候选位感条纹分区中的条纹线与对应的基准圆的第二交点的第二坐标,确定候选位感条纹分区中的条纹线相对于预设方向的斜率;第一坐标和第二坐标为同一参考坐标系下的坐标;
18、基于候选位感条纹分区中的条纹线相对于预设方向的斜率,确定第一斜率。
19、可选的,在另一种可能的设计方式中,本技术提供的移动方向的调整方法可以应用于控制设备,该方法还可以包括:
20、响应于用户的启动操作,向爬壁机器人发送第一启动指令;第一启动指令中包括导航路线;第一启动指令用于指示爬壁机器人基于导航路线移动,并在移动过程中基于预设频率采集当前位感条纹图像,且对采集到的当前位感条纹图像进行实时回传;
21、在发送第一启动指令之后,重复执行步骤a至步骤c,直至检测到第一停机指令。
22、可选的,在另一种可能的设计方式中,本技术提供的移动方向的调整方法可以应用于爬壁机器人,该方法还可以包括:
23、接收第二启动指令;第二启动指令中包括导航路线;第二启动指令用于指示爬壁机器人基于导航路线移动;
24、基于导航路线开始移动,并在移动过程中重复执行步骤a至步骤c,直至检测到第二停机指令。
25、第二方面,本技术提供一种移动方向的调整装置,包括:获取模块、确定模块以及调整模块;
26、获取模块,用于执行步骤a:获取水冷壁管的当前位感条纹图像;当前位感条纹图像为,爬壁机器人在水冷壁管上移动的过程中采集的图像;当前位感条纹图像中包含多条平行排布的条纹线;
27、确定模块,用于执行步骤b:基于当前位感条纹图像中的条纹线,确定当前条纹参数;当前条纹参数,用于表征当前位感条纹图像中的条纹线相对于预设方向的倾斜程度;
28、调整模块,用于执行步骤c:根据当前条纹参数和预设条纹参数,调整爬壁机器人的移动方向;预设条纹参数,用于表征模板位感条纹图像中的条纹线相对于预设方向的倾斜程度。
29、可选的,在一种可能的设计方式中,当前条纹参数为,当前位感条纹图像中的条纹线相对于预设方向的第一斜率;预设条纹参数为,模板位感条纹图像中的条纹线相对于预设方向的第二斜率。
30、可选的,在另一种可能的设计方式中,调整模块具体用于:
31、根据第一斜率和第二斜率确定当前偏移角;
32、若确定当前偏移角与偏移角阈值满足预设条件,则基于当前偏移角调整爬壁机器人的移动方向;
33、若确定当前偏移角与偏移角阈值不满足预设条件,则控制爬壁机器人保持当前的移动方向。
34、可选的,在另一种可能的设计方式中,确定模块具体用于:
35、对当前位感条纹图像进行预处理,得到目标位感条纹图像;
36、基于预设划分规则将目标位感条纹图像划分为n个位感条纹分区;n为大于1的正整数;
37、基于位感条纹分区中的条纹线相对于预设方向的斜率,确定第一斜率。
38、可选的,在另一种可能的设计方式中,基于位感条纹分区中的条纹线相对于预设方向的斜率,确定模块具体还用于:
39、在n个位感条纹分区中的每个位感条纹分区的预设位置处添加基准圆;其中,基准圆的直径小于预设宽度;
40、基于每个位感条纹分区中的条纹线与对应的基准圆的交点数,从n个位感条纹分区中确定出候选位感条纹分区;候选位感条纹分区中的条纹线与对应的基准圆的交点数为2;
41、基于候选位感条纹分区中的条纹线与对应的基准圆的第一交点的第一坐标,以及候选位感条纹分区中的条纹线与对应的基准圆的第二交点的第二坐标,确定候选位感条纹分区中的条纹线相对于预设方向的斜率;第一坐标和第二坐标为同一参考坐标系下的坐标;
42、基于候选位感条纹分区中的条纹线相对于预设方向的斜率,确定第一斜率。
43、可选的,在另一种可能的设计方式中,本技术提供的移动方向的调整装置可以应用于控制设备,该装置还可以包括:发送模块和执行模块;
44、发送模块,用于响应于用户的启动操作,向爬壁机器人发送第一启动指令;第一启动指令中包括导航路线;第一启动指令用于指示爬壁机器人基于导航路线移动,并在移动过程中基于预设频率采集当前位感条纹图像,且对采集到的当前位感条纹图像进行实时回传;
45、执行模块,用于在发送模块发送第一启动指令之后,调用获取模块、确定模块以及调整模块,重复执行步骤a至步骤c,直至检测到第一停机指令。
46、可选的,在另一种可能的设计方式中,本技术提供的移动方向的调整装置可以应用于爬壁机器人,该装置还可以包括:接收模块和移动模块;
47、接收模块,用于接收第二启动指令;第二启动指令中包括导航路线;第二启动指令用于指示爬壁机器人基于导航路线移动;
48、移动模块,用于基于导航路线开始移动,并在移动过程中调用获取模块、确定模块以及调整模块,重复执行步骤a至步骤c,直至检测到第二停机指令。
49、第三方面,本技术提供一种移动方向的调整设备,该设备可以是爬壁机器人本身,也可以用于控制爬壁机器人的控制设备,包括存储器、处理器、总线和通信接口;存储器用于存储计算机执行指令,处理器与存储器通过总线连接;当移动方向的调整设备运行时,处理器执行存储器存储的计算机执行指令,以使移动方向的调整设备执行如上述第一方面提供的移动方向的调整方法。
50、第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,当计算机执行指令时,使得计算机执行如第一方面提供的移动方向的调整方法。
51、第五方面,本技术提供一种计算机程序产品,该计算机程序产品包括计算机指令,当计算机指令在计算机上运行时,使得计算机执行如第一方面提供的移动方向的调整方法。
52、需要说明的是,上述计算机指令可以全部或者部分存储在计算机可读存储介质上。其中,计算机可读存储介质可以与移动方向的调整设备的处理器封装在一起的,也可以与移动方向的调整设备的处理器单独封装,本技术对此不做限定。
53、本技术中第二方面、第三方面、第四方面以及第五方面的描述,可以参考第一方面的详细描述;并且,第二方面、第三方面、第四方面以及第五方面的描述的有益效果,可以参考第一方面的有益效果分析,此处不再赘述。
54、在本技术中,对于上述涉及到的设备或功能模块的名称不构成限定,在实际实现中,这些设备或功能模块可以以其他名称出现。只要各个设备或功能模块的功能和本技术类似,均属于本技术权利要求及其等同技术的范围之内。
55、本技术的这些方面或其他方面在以下的描述中会更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!