一种飞行器编队位置重构解析优化方法
1.本发明涉及飞行器协同制导与控制技术领域,具体涉及一种飞行器编队位置重构解析优化方法。
背景技术:
2.在飞行器编队重构及队形变换问题中,一个需要解决的重要问题是为原编队队形中的每个飞行器分配重构编队队形中的位置。关于多智能体编队位置的重构与优化,目前已有一些相关的技术。在吕光颢,彭周华,王丹,窦伟滔提出的无人船集群队形重构的目标任务分配一文中,针对无人船编队队形重构中的目标分配问题,通过各无人船的当前位置,生成基于距离的收益函数,提出基于最大迭代次数的拍卖终止机制。在mosteo a r,montijano e,tardioli d.optimal role and position assignment in multi-robot freely reachable formations[j].automatica一文中,对于多机器人队形变换时角色分配的问题,将编队期望位置相对于机器人的初始位置和姿势,分解为平移和旋转,以最小化总位移为目标对平移、旋转和分配的组合参数进行了优化。在周佳加,张强,王宏健,张洪泉,王莹莹提出的基于双层路径优化算法的多机器人最优编队方法一文中,设计了一种基于pso算法求解最优编队集合点的方法,根据总能耗约束将路径规划转换成指派问题,并基于chnn搜索最优分配路径,实现最优编队集结。在曾旭提出的基于分布式架构的无人机编队协同控制技术研究一文中,将飞行器队形变换的最优解问题转换为求取队形变换时间最小时各飞行器间对应关系的问题,并利用匈牙利算法进行求解。
[0003]
目前针对多飞行器编队重构位置分配问题的研究,主要考虑因素仅为各飞行器到达指定位置的总时间最少或总路程最短,而缺少对队形变换中各飞行器协同因素的考虑,比如,各飞行器完成变换的时间差最小即几乎同时完成队形变换、在队形变换过程中飞行器轨迹尽量减少交叉即减小碰撞的风险。另外,目前的技术都是基于遗传算法等智能优化算法来求解编队位置重构问题,求解速度慢,很难满足在线应用的要求。
技术实现要素:
[0004]
有鉴于此,本发明提供了一种飞行器编队位置重构解析优化方法,不仅考虑了飞行器编队位置重构时单个飞行器的个体收益,还考虑了多飞行器轨迹交叉和尽量同时到达的协同收益,实现较优解寻找的快速、可在线实现的多飞行器编队位置重构方法。
[0005]
为达到上述目的,本发明的技术方案为一种飞行器编队位置重构解析优化方法,以飞行器编队前位置为原位置,编队后位置为新位置,飞行器数量为n,分别处于n个原位置,编队后期望新位置包括n个,则n个原位置分别对应到达n个期望新位置每种可行性为一个方案,采用如下步骤进行重构解析优化:
[0006]
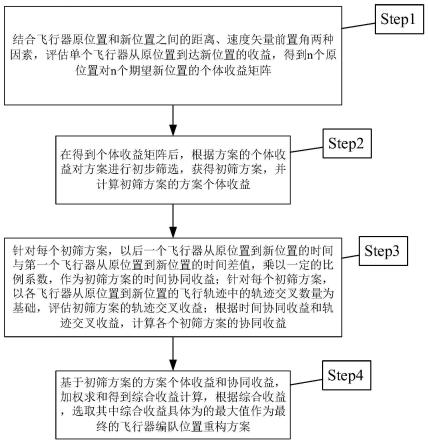
step1:结合飞行器原位置和新位置之间的距离、速度矢量前置角两种因素,评估单个飞行器从原位置到达新位置的收益,得到n个原位置对n个期望新位置的个体收益矩阵。
[0007]
step2:在得到个体收益矩阵后,根据飞行器原位置和新位置之间的个体收益对方案进行初步筛选,获得初筛方案,并计算初筛方案的方案个体收益矩阵。
[0008]
step3:针对每个初筛方案,以最后一个飞行器从原位置到新位置的时间与第一个飞行器从原位置到新位置的时间差值,乘以一定的比例系数,作为初筛方案的时间协同收益。
[0009]
针对每个初筛方案,以各飞行器从原位置到新位置的飞行轨迹中的轨迹交叉数量为基础,评估初筛方案的轨迹交叉收益。
[0010]
根据时间协同收益和轨迹交叉收益,计算各个初筛方案的协同收益。
[0011]
step4:基于各初筛方案的方案个体收益和协同收益,加权求和得到综合收益,根据综合收益,选取其中综合收益最大的方案作为最终的飞行器编队位置重构方案。
[0012]
进一步地,结合飞行器原位置和新位置之间的距离、速度矢量前置角两种因素,评估单个飞行器从原位置到达新位置的个体收益,得到n个原位置对n个期望新位置的个体收益矩阵,具体为:
[0013]
飞行器原位置i和新位置j之间的距离为r
ij
。
[0014]
飞行器的速度矢量与原位置-新位置连线之间的夹角为速度前置角,包括纵向速度矢量前置角η
θ,ij
和侧向速度矢量前置角η
ψ,ij
。
[0015]
对飞行器原位置和新位置之间的距离、速度前置角进行归一化处理,使其放缩至0~1区间,并分配权值,加权求和得到当前飞行器从原位置i到新位置j的个体收益。
[0016]
由此可以得到n个原位置对n个期望新位置的个体收益矩阵。
[0017]
进一步地,在得到个体收益矩阵后,根据飞行器原位置对期望新位置的个体收益对方案进行初步筛选,获得初筛方案,具体为:
[0018]
方案中n个原位置分别为m1~mn,优先对原位置m1的飞行器进行期望新位置的分配,之后再按照m2,m3,...,m
n-1
,mn的顺序,分别给相应原位置按照一定的规则分配个体收益较优的期望新位置;当优先给m1分配的方案选完之后,再优先给原位置m2进行分配,之后按照m3,m4...,mn,m1的顺序对其分配;如此进行下去,最后优先给原位置mn进行分配,然后按照m1,m2,
…
,m
n-2
,m
n-1
的顺序进行分配,对于n个原位置来讲,其机会均等,由此获得初筛方案。
[0019]
进一步地,针对每个初筛方案,以最后一个飞行器从原位置到新位置的时间与第一个飞行器从原位置到新位置的时间差值,乘以一定的比例系数,作为初筛方案的时间协同收益,具体为:
[0020]
第i个原位置处飞行器飞向第j个新位置的飞行时间预测公式为
[0021][0022]
式中,r
ij
为第i个原位置和第j个新位置之间的距离;v
0,ij
为接近速度。
[0023]
第k个初筛方案对应的时间协同收益j
t,k
为j
t,k
=k
t
·
(t
fmax,k-t
fmin,k
)。
[0024]
式中,t
fmin,k
为第一个原位置处飞行器飞到新位置的时间,t
fmax,k
为最后一个原位置处飞行器飞到新位置的时间;k
t
为比例系数,k
t
<0。
[0025]
进一步地,针对每个初筛方案,以各飞行器从原位置到新位置的飞行轨迹中的轨迹交叉数量为基础,评估初筛方案的轨迹交叉收益,具体为:
[0026]
设定轨迹交叉因子cr,用于表示轨迹交叉的复杂程度;将飞行器从原位置到新位
置的飞行轨迹分别投影到侧向平面和纵向平面内,并将在侧向平面内的轨迹交叉定义为侧向轨迹交叉,在纵向平面内的轨迹交叉定义为纵向轨迹交叉;按照如下方式计算纵向轨迹交叉因子cry和侧向轨迹交叉因子crz。
[0027]
对于各个新位置分配方案,取各原位置对应的y坐标y
m1
,y
m2
,......,y
mn
,将其由小到大升序排列,原位置顺序矩阵为ym,再得到对应的攻击新位置的y坐标,对应新位置顺序矩阵为y
t
,分别为
[0028][0029]
计算其中不按升序排列的次数即为纵向轨迹交叉次数;若则计纵向轨迹交叉次数为1次,反之,则为不交叉;依次判断的交叉情况,并计数交叉次数为cry。
[0030]
对于各个新位置分配方案,取各原位置对应的z坐标将其由小到大升序排列,顺序矩阵为zm,再得到对应的处飞行器飞向新位置的z坐标,对应矩阵为z
t
,分别为
[0031][0032]
计算其中不按升序排列的次数即为纵向轨迹交叉次数,若则计纵向轨迹交叉次数为1次,反之,则为不交叉;依次判断的交叉情况,并计数交叉次数crz。
[0033]
计算各个初筛方案的纵向轨迹交叉和侧向轨迹交叉次数之和为为方案pk的纵向轨迹交叉次数,为方案pk的侧向轨迹交叉次数,为方案pk的整体轨迹交叉次数。
[0034]
则各个方案的轨迹交叉收益为为方案pk的轨迹交叉收益,kc为交叉收益比例系数,kc<0。
[0035]
有益效果:
[0036]
1、本发明提供的一种飞行器编队位置重构解析优化方法,该方法不仅考虑了飞行器编队位置重构时单飞行器的个体收益,还考虑了多飞行器飞行轨迹交叉和尽量同时到达的协同收益,更具实际意义。本发明基于各飞行器到达指定位置的距离和速度矢量前置角,设计了个体收益计算方法,并根据个体收益进行方案分配,然后考虑各方案飞行器到达指定位置的时间协同性和轨迹交叉性,设计了协同收益计算方法,最终结合个体收益和协同收益,选择综合收益最大的方案,得到编队重构位置分配模型。相比于现有的技术,考虑了各飞行器到达指定位置的协同收益,协调编队中各飞行器变化关系,避免干扰和碰撞。
[0037]
2、本发明不涉及智能优化等速度慢的算法,基于先进行个体收益较优方案初筛、再综合协同收益进一步优化选择的解析方法获得较优解,计算速度快,能够在线应用。
附图说明
[0038]
图1为编队重构位置分配问题场景示意图;
[0039]
图2为解析优化算法分配方案图;
[0040]
图3为遗传算法每代种群目标函数值图;
[0041]
图4为遗传算法分配方案图;
[0042]
图5为本发明提供的一种飞行器编队位置重构解析优化方法流程图。
具体实施方式
[0043]
下面结合附图并举实施例,对本发明进行详细描述。
[0044]
本发明将飞行器编队位置重构优化问题可以转化为导弹攻击目标时的弹目分配问题,即将要求的新的队形中导弹所在位置看作目标,则导弹编队位置重构问题可看作n个导弹攻击n个目标时的弹目分配问题,导弹对应飞行器所在原位置,目标对应飞行器所飞向的新位置。同时结合导弹攻击目标的个体收益以及协同收益,提出一种考虑飞行器从原位置飞向新位置的个体收益以及协同收益的飞行器编队位置重构解析优化方法。
[0045]
以飞行器编队前位置为原位置,编队后位置为新位置,飞行器数量为n,分别处于n个原位置,编队后期望新位置包括n个,则n个原位置分别对应到达n个期望新位置每种可行性为一个方案,采用如图5所示步骤进行重构解析优化:
[0046]
step1:个体收益计算
[0047]
个体收益指单个飞行器由原位置飞向新位置时的收益,考虑因素为原位置和新位置之间的距离以及速度与飞行轨迹之间的偏差。接下来分析这两个因素对个体收益的影响。
[0048]
(1)原位置-新位置间的距离
[0049]
在导弹目标分配问题中,考虑燃料消耗等问题,一般希望导弹攻击离自己比较近的目标,因此,可根据导弹与目标之间的距离(简称“弹目距离”)设置个体收益。弹目距离小,则个体收益大,反之,则小。
[0050]
则对于飞行器编队位置重构问题,在计算个体收益时,也应当考虑原位置与新位置之间的距离,距离小,则个体收益大,反之,则个体收益小。
[0051]
原位置-新位置间的距离计算方法为
[0052][0053]
式中,r
ij
为原位置mi和新位置tj之间的距离,x
m,i
、y
m,i
、z
m,i
为原位置mi在地面坐标系x、y、z轴上的位置坐标,x
t,j
、y
t,j
、z
t,j
为新位置tj在地面坐标系x、y、z轴上的位置坐标。
[0054]
(2)速度矢量前置角
[0055]
飞行器机动能力由可用过载表示。在导弹目标分配问题中,还需要考虑导弹飞向目标时弹道尽量平直、需用过载尽量小,以满足可用过载的约束。一般来说,导弹的速度矢量与导弹-目标连线(视线)之间的夹角(速度前置角)较小时,导弹的需要过载小,个体收益大,反之则需用过载大、个体收益小。
[0056]
基于以上弹目分配问题中对速度矢量角的考虑,针对飞行器编队速度前置角的计算方法为
[0057][0058]
其中
[0059][0060]
式中,η
θ
、η
ψ
分别为原位置-新位置连线的纵向速度矢量前置角和原位置-新位置连线的侧向速度矢量前置角,θ0、ψ0为飞行器由原位置飞向新位置飞行轨迹的倾角和偏角。下标“ij”表示第i个原位置处飞行器达到第j个新位置时的量。qy、qz分别为纵向和侧向的飞行器由原位置飞向新位置过程中的视线角。
[0061]
(3)总个体收益矩阵
[0062]
对各个原位置与不同新位置之间的距离、速度前置角进行归一化处理,使其放缩至0~1区间,并分配权值。基于前面分析,设个体收益的计算公式为
[0063][0064]
其中
[0065][0066]jindi
为个体收益,ω1《0、ω2《0、ω3《0为权值,且ω1+ω2+ω3=-1。
[0067]
由此可以得到n个原位置对n个期望新位置的个体收益矩阵为
[0068][0069]
step2:基于个体收益的方案初筛
[0070]
在得到个体收益矩阵后,对方案进行初步筛选。原位置和新位置的个数均为n,原位置编号为m1,m2,
…
,mn,新位置编号为t1,t2,
…
,tn。方案初筛的思路是:按照一定的原则,将个体收益较大的多种方案先选出来,作为初筛方案,并计算初筛方案的方案个体收益。每个初筛方案的方案个体收益是指方案中所有的原位置到达新位置的个体收益之和。
[0071]
本发明实施例中,在筛选个体收益较优方案时,涉及到优先考虑哪个原位置的飞行器的问题。本发明的方法为:首先,优先对原位置m1处的飞行器进行分配,之后再按照m2,m3,
…
,m
n-1
,mn的顺序,分别给相应原位置处的飞行器按照一定的规则分配个体收益较优的新位置;当优先给m1分配的方案选完之后,再优先给原位置m2处的飞行器进行分配,之后按照m3,m4…
,mn,m1的顺序对其分配;如此进行下去,最后优先给原位置mn处的飞行器进行分
配,然后按照m1,m2,
…
,m
n-2,mn-1
的顺序进行分配。因此,对于n个原位置处的飞行器来讲,其机会均等。
[0072]
具体为:
[0073]
设a,m为定值整数,且其具体分配包括如下步骤:
[0074]
步骤1:根据个体收益矩阵,以原位置m1为优先原位置,取待分配队列为m1,m2,m3,
…
,m
n-1
,mn,执行s101~s104进行新位置分配;
[0075]
以当前优先原位置作为当前分配原位置m0,将所有原位置均初始化标记为未分配;
[0076]
s101:根据个体收益矩阵,取当前分配原位置m0飞向不同新位置时所产生的个体收益,按照个体收益从大到小排序,保留前a个新位置,在保留的a个新位置中随机选择一个新位置作为当前分配原位置m0的分配对象t
j0
,即当前分配原位置m0处的飞行器飞向新位置t
j0
;当前分配原位置m0及其分配对象t
j0
的标记修改为已分配,在个体收益矩阵中将已分配的原位置m0和新位置t
j0
所在的行和列删除;
[0077]
s102:更新当前分配原位置m0为待分配队列中的下一原位置;判断标记为未分配的新位置数量是否大于a,若是,则返回s101;否则执行s103;
[0078]
s103:让当前分配原位置m0在剩余的标记为未分配的新位置中随机选择一个新位置作为其分配对象t
j0
,即当前分配原位置m0处的飞行器飞向新位置t
j0
;当前分配原位置m0及其分配对象t
j0
的标记修改为已分配,在个体收益矩阵中将已分配的原位置m0和新位置t
j0
所在的行和列删除;
[0079]
s104:更新当前分配原位置m0为排序在其之后的下一原位置;判断标记为未分配的新位置数量是否为0,若不为0,则返回s103;若标记为未分配的新位置数量为0,则n个原位置的分配结果全部获得,至此,每个原位置处的飞行器有且仅有一个分配新位置,完成针对优先原位置的方案分配;
[0080]
执行以上步骤获得针对优先原位置的k
por
种分配方案;
[0081]
步骤2:取原位置m2为优先原位置,取待分配队列为m2,m3,m4…
,mn,m1,执行步骤s101~s104;
[0082]
以此类推,最后取原位置mn为优先原位置,取待分配队列为mn,m1,m2,
…
,m
n-2
,m
n-1
,执行步骤s101~s104;
[0083]
每次产生k
por
种分配方案,最终获得nk
por
种初筛方案。
[0084]
步骤3:以其他n-1个原位置为优先,每次也产生k
por
种分配方案,最后会有nk
por
种初筛方案;
[0085]
具体地,以优先给原位置m1处飞行器分配新位置,之后给m2,m3,
…
,mn分配为例,说明每一轮优先分配的过程。设a,m为定值整数,且明每一轮优先分配的过程。设a,m为定值整数,且其具体分配过程为:
[0086]
①
根据个体收益矩阵,优先给原位置m1处的飞行器分配新位置。首先,根据原位置m1处的飞行器飞向不同新位置时所产生的个体收益,淘汰对m1而言个体收益较小的新位置,
只保留对m1个体收益较大的新位置。假设保留前a个对m1个体收益较大的新位置,然后让原位置m1处的飞行器在保留的a个新位置中随机选择一个新位置作为其分配对象,对应的分配组合为(m1,t
j1
),即原位置m1处的飞行器飞向新位置t
j1
,以此作为第一个飞行器的分配结果。当给飞行器分配了新位置后,不能再给此原位置处飞行器分配其他新位置,而此新位置也不能再分配给其他原位置处的飞行器,所以,在个体收益矩阵中将原位置m1处的飞行器和新位置t
j1
所在的行和列去掉后,再给原位置m2,m3,
…
,m
n-1
,mn处的飞行器分配新位置。
[0087]
②
优先给m1分配完新位置后,按照原位置顺序给m2处的飞行器分配新位置。根据原位置m2处的飞行器飞向除t
j1
外的不同新位置时所产生的个体收益,保留前a个对m2处飞行器个体收益较大的新位置,然后让原位置m2处飞行器在保留的a个原位置中随机选择一个作为其分配对象,对应的分配组合为以此作为第二个原位置处的飞行器的分配结果。然后按照此分配规则,依次给原位置m3、m4、
…
、m
m-1
处的飞行器分配新位置。
[0088]
③
当给m
m-1
分配完成后,给原位置mm处的飞行器分配新位置。当原位置mm处的飞行器飞向除外的新位置时,剩余的新位置个数为a,此时,保留剩余全部新位置个数,让mm处的飞行器在保留的新位置中随机选择一个作为分配对象,对应的分配组合为以此作为第m个原位置mm处的飞行器的分配结果。
[0089]
④
当给mm分配完成后,给原位置m
m+1
处的飞行器分配新位置。当原位置m
m+1
处的飞行器飞向除外的新位置时,剩余的新位置个数为a-1,保留剩余的全部新位置个数。然后让飞行器在保留的新位置中随机选择一个作为分配对象,对应的分配组合为(m
m+1
,t
jm+1
),以此作为第m+1个原位置m
m+1
处的飞行器的分配结果。然后按照此分配规则,依次给原位置m
m+2
,
…
,m
n-1
处的飞行器分配新位置。
[0090]
⑤
当给m
n-1
分配完成后,给原位置mn处的飞行器分配新位置。当原位置mn处的飞行器飞向除外的新位置时,剩余的新位置个数为1,此时,剩余的新位置即为mn处飞行器的分配对象,对应的分配组合为以此作为第n个原位置处的飞行器的分配结果。至此,每个飞行器有且仅有一个分配新位置,完成一次方案分配。
[0091]
由上可知,优先给原位置m1处飞行器分配新位置,之后给m2,m3,
…
,mn处飞行器分配的过程中,除分配顺序中的最后一个原位置mn外,其余原位置处的飞行器都是在保留的新位置中随机选择一个较优新位置作为分配对象。所以,假定选取优先给m1处飞行器分配新位置的分配顺序的分配方案为k
por
,按照给定的分配规则,产生不同的分配方案。以其他n-1个原位置为优先,每次也产生k
por
种方案,最后会有nk
por
种初筛方案。
[0092]
筛选分配方案的总数为k(k=nk
por
),记为p1,p2,...,pk。设第k(k=1,2,...,k)个方案的方案个体收益为则其计算方法为
[0093][0094]
式中,为方案k中第i个原位置处的飞行器飞向第j个新位置的个体收益,为各原位置处的飞行器飞向新位置的个体收益之和,即为该方案的方案个体收益。得到各个筛选方案的方案个体收益为
[0095][0096]
至此,初步筛选分配方案完成。
[0097]
step3:初筛方案协同收益计算
[0098]
在分配过程中,还要考虑其协同性,比如到达目标的时间差尽量少即各导弹尽量同时到达目标,本发明除了考虑上述到达时间协同问题,还考虑在飞行器从原位置飞向新位置过程中,为了减少碰撞的危险,尽量避免轨迹交叉的情况。接下来分析两个因素的影响。
[0099]
(1)时间协同收益
[0100]
在进行分配过程中,各个飞行器从原位置飞向新位置的时间差需要尽可能地小。各飞行器从原位置飞向新位置时间差越小,时间协同收益越大。定义时间协同收益为:最后一个飞行器从原位置到达新位置的时间与第一个飞行器从原位置到达新位置的时间差值,乘以一定的比例系数。第i个原位置处飞行器飞向第j个新位置的飞行时间预测公式为
[0101][0102]
式中,v
0,ij
为接近速度,求解公式为
[0103]v0,ij
=v[cosθ
0,ij
cosq
y,ij
cos(ψ
0,ij-q
z,ij
)+sinθ
0,ij
sinq
y,ij
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0104]
第k个初筛方案对应的时间协同收益j
t,k
为
[0105]jt,k
=k
t
·
(t
fmax,k-t
fmin,k
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0106]
式中,t
fmin,k
为第一个飞行器从原位置到达新位置的时间,t
fmax,k
为最后一个飞行器从原位置到达新位置的时间(根据(9)得到)。各方案中各飞行器从原位置到达新位置时间差越大,时间协同收益越小,因此系数k
t
<0。
[0107]
(2)轨迹交叉收益
[0108]
在各飞行器从原位置飞向新位置的过程中,为了减小飞行器在飞行过程中相互干扰或碰撞的风险,各飞行器的飞行轨迹需要尽可能地避免交叉。定义轨迹交叉因子cr,表示轨迹交叉的复杂程度。将飞行器飞行轨迹分别投影到侧向平面和纵向平面内,并将在侧向平面内的轨迹交叉定义为侧向轨迹交叉,在纵向平面内的轨迹交叉定义为纵向轨迹交叉。下面具体介绍纵向轨迹交叉因子cry和侧向轨迹交叉因子crz的计算方法。
[0109]
(a)纵向轨迹交叉
[0110]
对于各个新位置的分配方案,取各飞行器原位置对应的y坐标将其由小到大升序排列,飞行器原位置顺序矩阵为ym,再得到对应的到达新位置的y坐标,对应新位置顺序矩阵为y
t
,分别为
[0111][0112]
计算其中不按升序排列的次数即为纵向轨迹交叉次数。若
[0113][0114]
则计纵向轨迹交叉次数为1次,反之,则为不交叉。依次判断的交叉情况,并计数交叉次数为cry。
[0115]
(b)侧向轨迹交叉
[0116]
对于各个新位置分配方案,取各飞行器原位置对应的z坐标将其由小到大升序排列,顺序矩阵为zm,再得到对应的到达新位置的z坐标,对应矩阵为z
t
,分别为
[0117][0118]
计算其中不按升序排列的次数即为纵向轨迹交叉次数。若
[0119][0120]
则计纵向轨迹交叉次数为1次,反之,则为不交叉。依次判断的交叉情况,并计数交叉次数crz。
[0121]
(c)轨迹交叉收益计算方法
[0122]
计算各个方案的纵向轨迹交叉和侧向轨迹交叉次数之和为
[0123][0124]
式中,为方案pk的纵向轨迹交叉次数,为方案pk的侧向轨迹交叉次数,为方案pk的整体轨迹交叉次数。
[0125]
则各个方案的轨迹交叉收益为
[0126][0127]
式中,为方案pk的轨迹交叉收益,kc为交叉收益比例系数。一般来说,各方案中飞行器轨迹交叉次数越多,轨迹交叉收益越小,因此通常取kc<0。
[0128]
(3)协同收益的计算
[0129]
在分别计算得到时间协同收益、轨迹交叉收益之后,计算各个方案的协同收益。计算方法为
[0130][0131]
至此,可以得到各个方案的协同收益矩阵为
[0132][0133]
step4:基于个体收益和协同收益的综合收益计算
[0134]
根据式(8)和式(19),可以计算得到分配方案pk的个体收益和协同收益则分配方案pk的综合收益为
[0135][0136]
式中,ω
indi
为方案个体收益的权值系数,ω
coop
为时间同步收益和轨迹交叉收益的综合协同权值系数,且有
[0137]
ω
indi
+ω
coop
=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0138]
根据综合收益,选取其中综合收益的最大值作为最终的分配方案。
[0139]
实施例1
[0140]
以下对基于飞行器编队位置重构解析优化方法的验证。
[0141]
(1)仿真条件设置
[0142]
多飞行器编队的常见队形包括横队队形、正方形队形、梯形队形、三角形队形等。本发明以正方形队形为例,对解析优化方法和遗传算法进行对比,验证解析算法的性能。
[0143]
设飞行器数量为n=12,编号分别为m1、m2、
…
、m12,重构队形中期望位置的编号分别为t1、t2、
…
、t12,假设编队由横队队形变换为正方形队形,编队重构位置分配问题场景如图1所示。
[0144]
设多飞行器编队初始条件如表1所示。表中,x0、y0、z0分别表示飞行器初始时刻在地面坐标系x、y、z方向上的位置,v0表示发射初速度,θ0、ψ0表示初始轨迹倾角和轨迹偏角。
[0145]
表1编队中各飞行器初始条件表
[0146]
编号x0(m)y0(m)z0(m)v0(m/s)θ0(rad)ψ0(rad)m1137001500131002000.01821.6212m2138001500131002000.04261.6358m3139001500131002000.06351.5848m4140001500131002000.03841.6252m5141001500131002000.02631.6252m6142001500131002000.00941.6247m7137501500130002000.01581.6254m813850150013000200-0.0791.5436m9139501500130002000.02111.6349m1014050150013000200-0.05651.5368m11141501500130002000.00871.6235m1214250150013000200-0.06471.5618
[0147]
正方形队形的期望位置分布如表2所示。
[0148]
表2正方形队形期望位置分布表
[0149]
编号期望位置/m编号期望位置/m
ꢀꢀꢀꢀ
t1(13840,1500,14140)t7(14140,1500,13840)t2(13940,1500,14140)t8(14040,1500,13840)t3(14040,1500,14140)t9(13940,1500,13840)t4(14140,1500,14140)t10(13840,1500,13840)t5(14140,1500,14040)t11(13840,1500,13940)t6(14140,1500,13940)t12(13840,1500,14040)
[0150]
个体收益、协同收益和综合收益权值系数设置如表3所示。
[0151]
表3个体收益、协同收益综合收益权值系数表
[0152][0153]
设解析优化算法的方案次数为k=1200,有12种飞行器新位置分配顺序,每种分配顺序有100个方案,其中,a=3,m=10。
[0154]
为了对比,采用姜崃提出的基于遗传算法的多目标分配策略一文中记载的遗传算法对上述问题进行求解,此时以原位置-新位置分配矩阵作为设计变量,设目标函数为min(-j(pk))。遗传算法相关参数设置如表4所示。
[0155]
表4改进遗传算法相关参数表
[0156]
参数数值参数数值种群规模100交叉概率0.9种群迭代次数1000变异概率0.08
[0157]
(2)对比仿真分析
[0158]
基于表1、表2、表3和表4的仿真条件,将编队由横队队形变换为正方形队形,利用解析优化方法和遗传算法分别对飞行器重构位置分配进行仿真和分析。
[0159]
解析算法最终方案分配如图2所示。
[0160]
利用遗传算法进行求解,每代种群的目标函数值如图3所示,分配方案如图4所示。
[0161]
由图3可以看出,目标函数值逐渐减小,最终收敛到最小值,为min(-j
max
)=6.24254,对应的综合收益最大值为j
max
=-6.24254。
[0162]
解析优化算法和遗传算法的飞行器位置分配情况如表5所示。
[0163]
表5飞行器位置分配情况表
[0164][0165]
由表5可以看出,解析优化算法和遗传算法的位置分配除原位置m7和m8的飞行器
外,各飞行器需要到达的期望位置都相同。
[0166]
对解析优化算法和遗传算法的各指标性能进行对比,对比情况如表6所示。
[0167]
表6改进遗传算法相关参数表
[0168] 仿真时间/(s)个体收益协同收益最大收益解析算法0.0748-6.5067-6.1776-6.2434遗传算法10.1401-6.5023-6.1776-6.2425
[0169]
由表6可以看出,解析优化算法和遗传算法的个体收益、协同收益和最大收益均相差不大。但是在时间方面,解析优化算法的仿真时间为0.0748s,而遗传算法的仿真时间为10.1401s,解析优化算法比遗传算法快了140倍左右,在计算速度方面具有巨大优势。在工程应用中,耗费很长时间得到最优解的方法并不可行,能够快速得到较优解的方法更具应用价值。通过对解析优化算法和遗传算法各指标性能进行对比可以看出,在多飞行器编队位置重构问题中,解析优化算法能够以非常快的速度得到较优解,满足工程需要,具有较广阔的军事应用前景。
[0170]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1