固定翼飞机绕点盘旋自动控制方法、装置、设备及介质与流程
本发明涉及定位导航与控制,更具体地,涉及一种固定翼飞机绕点盘旋自动控制方法、装置、设备及介质。
背景技术:
1、目前固定翼飞机在某个区域的盘旋,依靠手动控制指令滚转角或者偏航角实现,或者由自动飞行控制计算机自动驾驶,跟随设计的盘旋航迹实现自主盘旋。一般情况下,固定翼飞机主要依靠航迹规划或者手动控制横侧向姿态,来实现稳定盘旋。但是航迹控制需要上传航迹,另外航迹的直线段切换会导致姿态变化剧烈,而手动控制指令滚转角的盘旋难以长时间维持,且盘旋轨迹不精确。
2、目前尚需开发一种固定翼飞机绕点盘旋自动控制方法。
3、公开于本发明背景技术部分的信息仅仅旨在加深对本发明的一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、本发明提出了一种固定翼飞机绕点盘旋自动控制方法、装置、设备及介质,实现固定翼飞机稳定盘旋半径和轨迹的精确控制。
2、第一方面,本公开实施例提供了一种固定翼飞机绕点盘旋自动控制方法,包括:
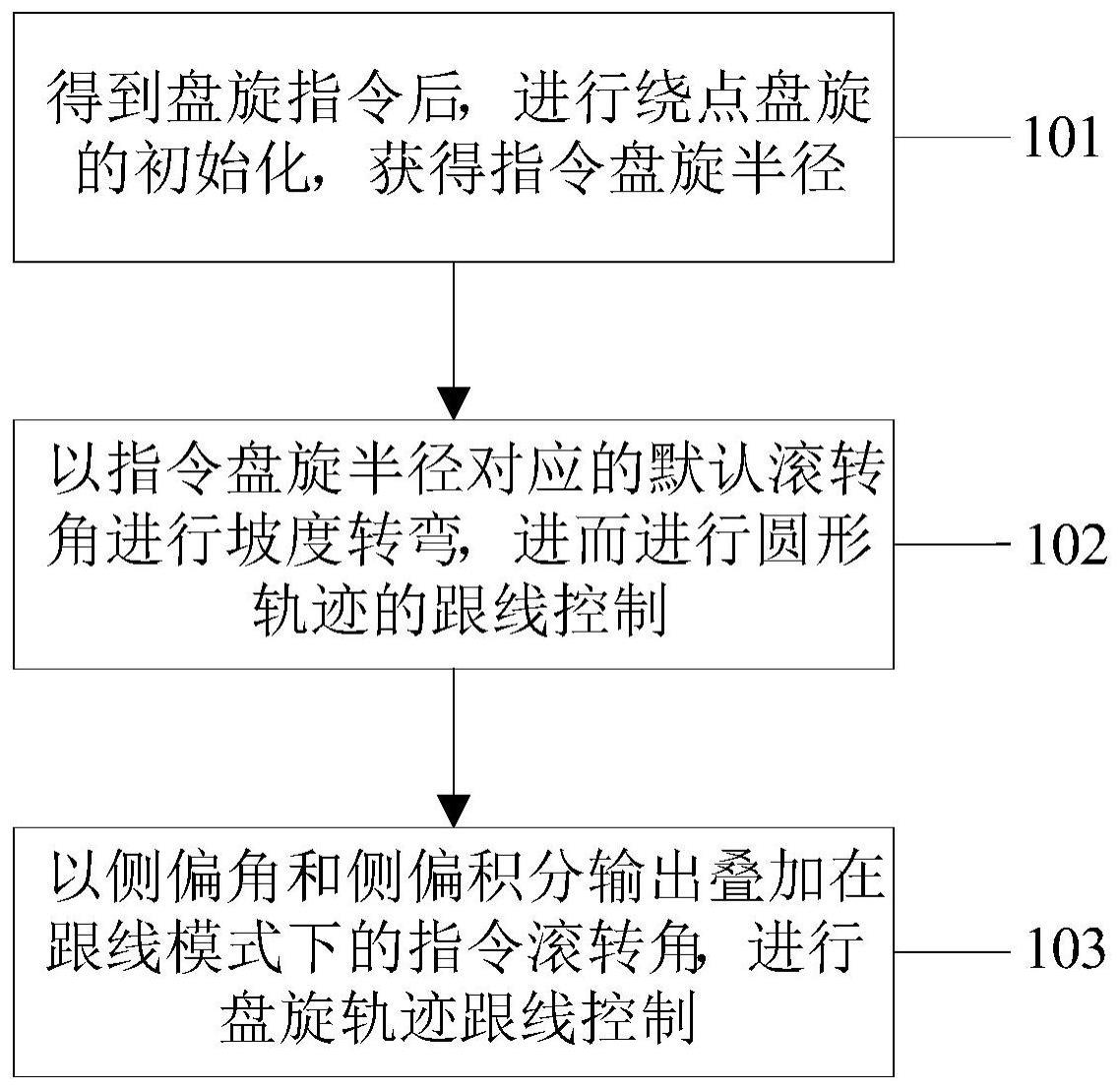
3、得到盘旋指令后,进行绕点盘旋的初始化,获得指令盘旋半径;
4、以所述指令盘旋半径对应的默认滚转角进行坡度转弯,进而进行圆形轨迹的跟线控制;
5、以侧偏角和侧偏积分输出叠加在跟线模式下的指令滚转角,以此为盘旋轨迹控制回路,进行盘旋轨迹跟线控制。
6、优选地,绕点盘旋的初始化包括:
7、以所述盘旋指令的经纬度作为盘旋点,依据当前工况自动初始化生成所述指令盘旋半径。
8、优选地,所述工况包括本场飞行和任务巡航,所述本场飞行对应的指令盘旋半径小于所述任务巡航对应的指令盘旋半径。
9、优选地,以qnh值作为计算所述指令盘旋半径的输入,当qnh值在1013±0.5范围以内时,以高空任务飞行工况设置较大的盘旋半径,当qnh值在1013±0.5范围以外时,以低空本场飞行工况设置较小的盘旋半径。
10、优选地,距离轨迹小于所述指令盘旋半径的25%后,开始圆形轨迹的跟线控制。
11、优选地,所述跟线模式下的指令滚转角由pid控制回路构成。
12、优选地,所述跟线模式下的指令滚转角为:
13、
14、其中,分别为滚转角控制回路的侧偏角比例系数和轨迹侧偏积分系数,φ为固定翼飞机的实时航向角,φc为跟线模式下的指令滚转角,侧偏角为φ与φc的差值,r为飞机距离盘旋点的距离,rc为指令盘旋半径,侧偏值为r与rc的差值。
15、作为本公开实施例的一种具体实现方式,
16、第二方面,本公开实施例还提供了一种固定翼飞机绕点盘旋自动控制装置,包括:
17、初始化模块,得到盘旋指令后,进行绕点盘旋的初始化,获得指令盘旋半径;
18、转弯趋近模块,以所述指令盘旋半径对应的默认滚转角进行坡度转弯,进而进行圆形轨迹的跟线控制;
19、轨迹控制模块,以侧偏角和侧偏积分输出叠加在跟线模式下的指令滚转角,以此为盘旋轨迹控制回路,进行盘旋轨迹跟线控制。
20、优选地,绕点盘旋的初始化包括:
21、以所述盘旋指令的经纬度作为盘旋点,依据当前工况自动初始化生成所述指令盘旋半径。
22、优选地,所述工况包括本场飞行和任务巡航,所述本场飞行对应的指令盘旋半径小于所述任务巡航对应的指令盘旋半径。
23、优选地,以qnh值作为计算所述指令盘旋半径的输入,当qnh值在1013±0.5范围以内时,以高空任务飞行工况设置较大的盘旋半径,当qnh值在1013±0.5范围以外时,以低空本场飞行工况设置较小的盘旋半径。
24、优选地,距离轨迹小于所述指令盘旋半径的25%后,开始圆形轨迹的跟线控制。
25、优选地,所述跟线模式下的指令滚转角由pid控制回路构成。
26、优选地,所述跟线模式下的指令滚转角为:
27、
28、其中,分别为滚转角控制回路的侧偏角比例系数和轨迹侧偏积分系数,φ为固定翼飞机的实时航向角,φc为跟线模式下的指令滚转角,侧偏角为φ与φc的差值,r为飞机距离盘旋点的距离,rc为指令盘旋半径,侧偏值为r与rc的差值。
29、第三方面,本公开实施例还提供了一种电子设备,该电子设备包括:
30、存储器,存储有可执行指令;
31、处理器,所述处理器运行所述存储器中的所述可执行指令,以实现所述的固定翼飞机绕点盘旋自动控制方法。
32、第四方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现所述的固定翼飞机绕点盘旋自动控制方法。
33、其有益效果在于:
34、1、盘旋轨迹精确,采用固定的盘旋半径,实际盘旋飞行中飞机距离盘旋中心点以圆形轨迹盘旋。
35、2、滚转姿态稳定,飞机以固定半径的圆形轨迹画圆盘旋,其需要的滚转角输出往往趋于一个固定值,飞行中的姿态也更稳定,有利于机载载荷作业。
36、3、实现过程简单,不需要手动规划、加载航迹文件,只需发送盘旋指令,就可以实现当前任务飞行或者本场飞行的盘旋工况。
37、4、工况适应性较好,鲁棒性较强,在不同外挂配置、重心重量状态、气象条件下均能保证理想的盘旋控制效果。
38、本发明的方法和装置具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
技术特征:
1.一种固定翼飞机绕点盘旋自动控制方法,其特征在于,包括:
2.根据权利要求1所述的固定翼飞机绕点盘旋自动控制方法,其中,绕点盘旋的初始化包括:
3.根据权利要求2所述的固定翼飞机绕点盘旋自动控制方法,其中,所述工况包括本场飞行和任务巡航,所述本场飞行对应的指令盘旋半径小于所述任务巡航对应的指令盘旋半径。
4.根据权利要求3所述的固定翼飞机绕点盘旋自动控制方法,其中,以qnh值作为计算所述指令盘旋半径的输入,当qnh值在1013±0.5范围以内时,以高空任务飞行工况设置较大的盘旋半径,当qnh值在1013±0.5范围以外时,以低空本场飞行工况设置较小的盘旋半径。
5.根据权利要求1所述的固定翼飞机绕点盘旋自动控制方法,其中,距离轨迹小于所述指令盘旋半径的25%后,开始圆形轨迹的跟线控制。
6.根据权利要求1所述的固定翼飞机绕点盘旋自动控制方法,其中,所述跟线模式下的指令滚转角由pid控制回路构成。
7.根据权利要求6所述的固定翼飞机绕点盘旋自动控制方法,其中,所述跟线模式下的指令滚转角为:
8.一种固定翼飞机绕点盘旋自动控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现权利要求1-7中任一项所述的固定翼飞机绕点盘旋自动控制方法。
技术总结
本发明公开了一种固定翼飞机绕点盘旋自动控制方法、装置、设备及介质。该方法可以包括:得到盘旋指令后,进行绕点盘旋的初始化,获得指令盘旋半径;以指令盘旋半径对应的默认滚转角进行坡度转弯,进而进行圆形轨迹的跟线控制;以侧偏角和侧偏积分输出叠加在跟线模式下的指令滚转角,以此为盘旋轨迹控制回路,进行盘旋轨迹跟线控制。本发明实现了固定翼飞机稳定盘旋半径和轨迹的精确控制。
技术研发人员:折智强,李景欣,王呈昊
受保护的技术使用者:航天彩虹无人机股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!