一种无人航行器与搭载平台水面动态对接方法与流程
本发明涉及一种无人航行器与搭载平台水面动态对接方法,属于水上无人航行器对接回收。
背景技术:
1、随着无人与智能化技术的发展,无人航行器在海底地形地貌勘察、水下目标搜索、海洋数据收集、海洋科考、军事侦察等方面得到了广泛的应用,其在深海或者隐蔽海区执行简单重复性、长时间不间断作业有很大的优势。但是受限于自身能源以及水下通讯数据传输带宽,无人航行器无法一直作业,需要定期回收,完成能源补给、数据上传、设备维护等操作。
2、目前,水面无人船的对接回收方法主要有吊笼式对接回收和滑道对接回收两种。其中,吊笼式对接回收由吊笼与搭载平台上起重吊机的吊索相连接,吊笼放入水面,操控无人船驶入吊笼内完成对接回收,该方法组成较复杂、操作难度很大,需与特种吊机配合应用;滑道对接回收是指搭载平台尾部开设斜槽或滑道,操控无人船驶入滑道,配合平台相关操作,完成无人船与搭载平台对接,该方法对搭载平台要求较高,需对搭载平台进行特殊设计,适应性差。
3、目前,对于水下无人航行器的对接方法比较典型有背驼对接方式、坞载引导对接方式和水下平台落坐式对接方式。背驼对接方式主要是在搭载平台上安装垂直杆,在无人航行器上安装“v形剪”装置,通过声学导航系统引导无人航行器靠近搭载平台,让“v形剪”捕捉平台上的垂直杆,捕捉成功后弹簧触发机构进行锁定,由搭载平台背坨着无人航行器完成对接,该对接方法可以在水下360度全方位尝试对接,但机械设计复杂,对无人航行器的操纵性和导引系统要求高。坞载引导对接方式是搭载平台释放喇叭口圆锥型导向罩,通过声学导航系统引导无人航行器进入圆锥导向罩实现对接,这种对接方式机械结构简单,设备安装方便,但只能实现单方向对接,水下对接过程中受到水中海流的影响非常大,对接效率较低。水下平台落坐式对接适用于无人航行器与水中平台或者海底平台对接,其泊坞系统采用了一种类似于飞机着陆的方式,在无人航行器上有两个带挂钩的捕捉臂,通过声学引导系统引导无人航行器的捕捉臂去捕捉对接平台上的v型定位装置,然后调整无人航行器的位置和姿态着落在对接平台上,锁定机构实现无人航行器的固定,该对接方法机械设计复杂,操作难度大,对无人航行器的操纵性和导引系统要求很高,对接效率低。
技术实现思路
1、针对目前无人航行器与搭载平台对接回收存在的问题,本发明提供一种无人航行器与搭载平台水面动态对接方法,提高对接效率和自主性,有效减少对接过程的难度,可用于实现水面及水下无人航行器的自主对接。
2、本发明的目的是通过以下技术方案实现的。
3、一种无人航行器与搭载平台水面动态对接方法,包括以下步骤:
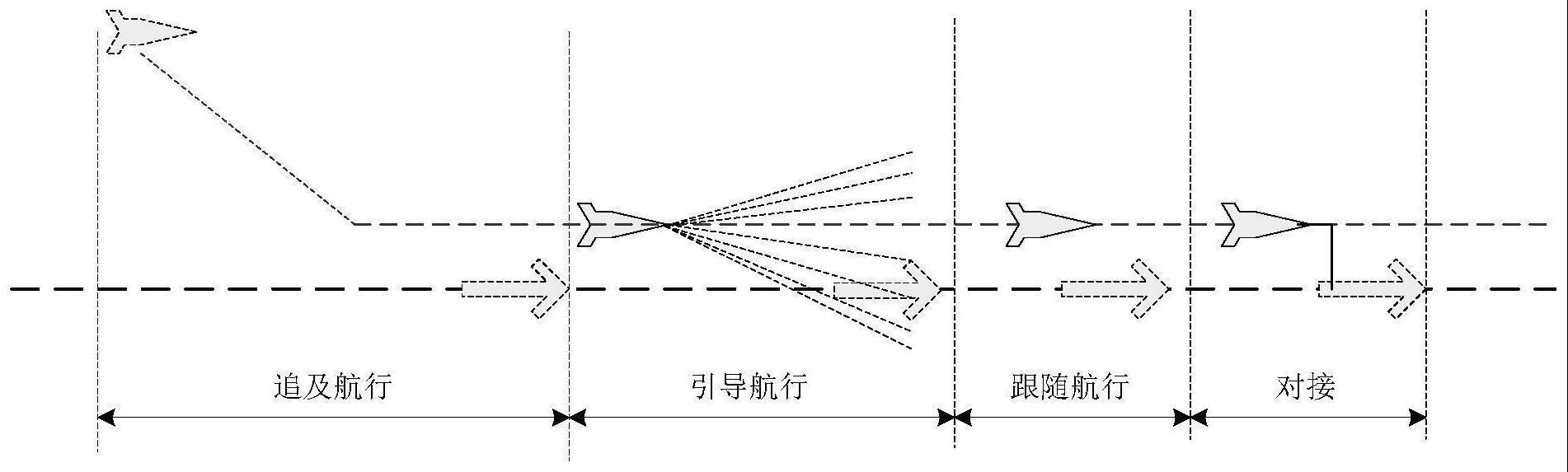
4、(1)追击航行
5、根据当前无人航行器和搭载平台的位置,以路径消耗(时间、空间、能量)为约束,制定无人航行器和搭载平台的作业航路(含航线和航速),并将该作业航路分别装载至无人航行器和搭载平台,则无人航行器按照预设航路追及搭载平台;若无人航行器航行于水下时,则在追击航行阶段结束时浮出水面,之后进入引导航行阶段;
6、进一步地,无人航行器追击至与搭载平台的距离小于150m时,无人航行器降速至3~10kn,同时搭载平台以3~10kn的航速按照预设航路航行;
7、进一步地,若无人航行器航行于水下时,则无人航行器追击至与搭载平台的距离小于100m时,使水下无人航信器浮出水面,之后进入引导航行阶段;
8、(2)引导航行
9、利用搭载平台以及无人航行器上的定位设备实时识别二者之间的相对距离和方位,并将各自识别的距离和方位数据发送给对方进行数据融合,确定最终两者之间的实时相对距离和方位,之后无人航行器结束原航路,按照当前的相对距离和方位,自主追及搭载平台;
10、进一步地,定位设备为导航型激光雷达、毫米波雷达或光学定位设备;
11、(3)跟随航行
12、进行舷侧对接时,无人航行器自主追及搭载平台的同时调整二者之间的横向距离,使无人航行器对准搭载平台侧面的对接位置,之后使无人航行器与搭载平台保持同速同向航行;
13、艉部对接时,无人航行器自主追及搭载平台的过程中使其对准搭载平台尾部的对接位置,之后使无人航行器与搭载平台保持同速同向航行;
14、进一步地,进行舷侧对接时,无人航行器自主追及至与搭载平台的距离小于40m时,无人航行器调整与搭载平台的横向距离,使同速同向航行时两者之间的横向距离为2~3m;艉部对接时,使同速同向航行时两者的相对距离为2~5m;
15、(4)对接
16、搭载平台上安装有辅助对接的可伸缩的牵引杆,且牵引杆的端部通过绳索连接有编织网;进行舷侧或艉部对接时,搭载平台的牵引杆摆出,使牵引杆端部的编织网与无人航行器头部的起吊钩接触,微调无人航行器航速使其起吊钩挂住牵引杆端部的编织网,之后无人航行器停机并依赖搭载平台拖带航行,至此完成了无人航行器与搭载平台的对接;
17、进一步地,无人航行器的起吊钩挂住牵引杆端部的编织网后,无人航行器和搭载平台逐步降速,搭载平台降速至2~5kn,无人航行器最终停机,搭载平台拖带无人航行器航行。
18、另外,若需要将无人航行器回收至搭载平台时,可以利用起吊装置的挂钩顺着牵引杆滑落至与无人航行器的起吊钩上,起吊装置的挂钩钩上无人航行器的起吊钩后,松脱牵引杆与编织网的绳子,牵引杆与编织网分开,通过起吊装置可直接吊装无人航行器至搭载平台。
19、有益效果:
20、(1)本发明所述动态对接的过程分为由远及近的追及航行、引导航行以及同速同向航行,制定初始作业航路后各阶段都是无人航行器自主航行完成,无需人员操作,无人航行器和搭载平台自主航行完成,杜绝了人工操作因素对对接过程的影响,而且提高了对接过程的自动化程度。
21、(2)本发明的引导航行阶段,通过导航型激光雷达或毫米波雷达或光学定位设备实时感知无人航行器与搭载平台的相对距离和方位,定位精度更高,采用相对距离和方位实现自主航行航迹控制更精确。
22、(3)本发明所述动态对接方法涉及的搭载平台结构简单,只需要可伸缩的牵引杆和编织网辅助对接,而且自主化程度高,对接效率及对接精度高,能够实现水面及水下无人航行器的自主对接,具有很好的应用前景。
技术特征:
1.一种无人航行器与搭载平台水面动态对接方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种无人航行器与搭载平台水面动态对接方法,其特征在于:在步骤(1)中,无人航行器追击至与搭载平台的距离小于150m时,无人航行器降速至3~10kn,同时搭载平台以3~10kn的航速按照预设航路航行。
3.根据权利要求1所述的一种无人航行器与搭载平台水面动态对接方法,其特征在于:若无人航行器航行于水下时,则无人航行器追击至与搭载平台的距离小于100m时,使水下无人航信器浮出水面,之后无人航行器结束原航路,自主追及搭载平台。
4.根据权利要求1所述的一种无人航行器与搭载平台水面动态对接方法,其特征在于:步骤(2)中的定位设备为导航型激光雷达、毫米波雷达或光学定位设备。
5.根据权利要求1所述的一种无人航行器与搭载平台水面动态对接方法,其特征在于:舷侧对接时,无人航行器自主追及至与搭载平台的距离小于40m时,无人航行器调整与搭载平台的横向距离,使同速同向航行时两者之间的横向距离为2~3m;艉部对接时,使同速同向航行时两者的相对距离为2~5m。
6.根据权利要求1至5任一项所述的一种无人航行器与搭载平台水面动态对接方法,其特征在于:步骤(4)中,无人航行器的起吊钩挂住牵引杆端部的编织网后,无人航行器和搭载平台逐步降速,搭载平台降速至2~5kn,无人航行器最终停机,搭载平台拖带无人航行器航行。
技术总结
本发明涉及一种无人航行器与搭载平台水面动态对接方法,属于水上无人航行器对接回收技术领域。该方法包括无人航行器按照预设航路追及搭载平台阶段,无人航行器基于其与搭载平台之间的实时相对距离和方位自主追击搭载平台阶段,无人航行器追击至搭载平台的对接位置后与搭载平台保持同速同向航行阶段,利用搭载平台上安装的可伸缩的牵引杆及牵引杆端部通过绳索连接的编织网实现无人航行器与搭载平台的对接,之后无人航行器停机并依赖搭载平台拖带航行。本发明所述方法涉及的搭载平台结构简单,对接操作简便,自主化程度高,对接效率高,对接精度高,实现了水面及水下无人航行器的自主对接,具有很好的应用前景。
技术研发人员:邵兴,杨鑫,徐杨,乔鹏飞,王卓,高琪琪,覃月明,戚战锋
受保护的技术使用者:宜昌测试技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!