机器人控制方法、机器人控制装置、机器人及存储介质与流程
本申请属于机器人,尤其涉及一种机器人控制方法、机器人控制装置、机器人及计算机可读存储介质。
背景技术:
1、在多楼层的楼宇中,机器人往往需要通过搭乘电梯来进行跨楼层工作,这不可避免地使机器人涉及到了进出电梯的操作。当前,机器人一般是在其进出电梯的过程中,先计算其当前位置与电梯内外的目标位置的差值,再将该差值与预设差值进行比对,以此来判定自己是否已成功进出电梯。显然,这一判定结果的准确性依赖于其预设差值的设定。一旦预设差值设置不当,就容易出现误判,使得机器人无法准确得知自己是否已经成功进出电梯,致使后续其它任务难以顺利执行。
技术实现思路
1、本申请提供了一种机器人控制方法、机器人控制装置、机器人及计算机可读存储介质,可使机器人在搭梯时准确获知自己是否已成功进出电梯,减少出现因进出电梯的误判而导致后续其它任务未能顺利执行的情况。
2、第一方面,本申请提供了一种机器人控制方法,该机器人控制方法应用于机器人,包括:
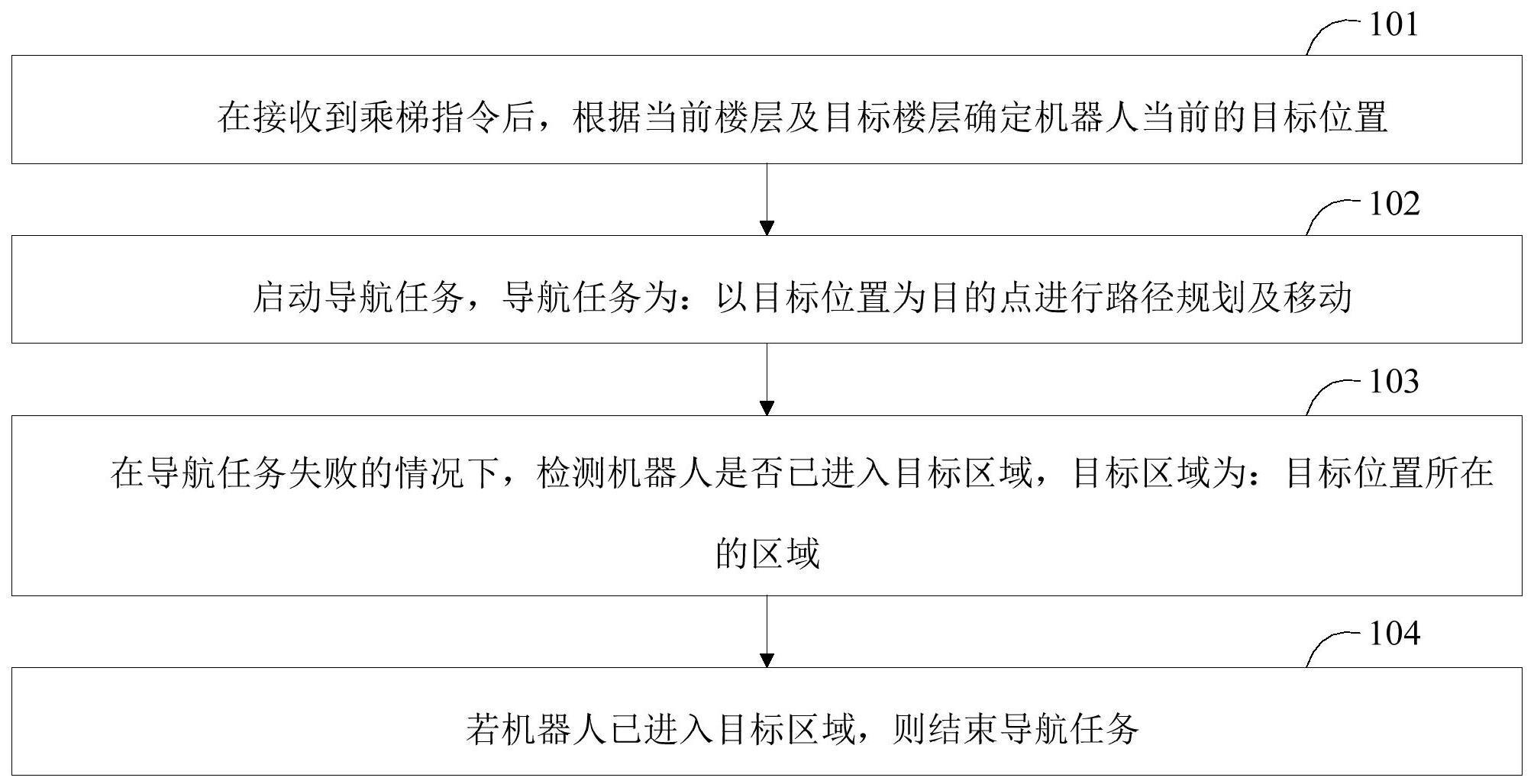
3、在接收到乘梯指令后,根据当前楼层及目标楼层确定机器人当前的目标位置;
4、启动导航任务,导航任务为:以目标位置为目的点进行路径规划及移动;
5、在导航任务失败的情况下,检测机器人是否已进入目标区域,目标区域为:目标位置所在的局部区域;
6、若机器人已进入目标区域,则结束导航任务。
7、第二方面,本申请提供了一种机器人控制装置,该机器人控制装置应用于机器人,包括:
8、确定模块,用于在接收到乘梯指令后,根据当前楼层及目标楼层确定机器人当前的目标位置;
9、启动模块,用于启动导航任务,导航任务为:以目标位置为目的点进行路径规划及移动;
10、检测模块,用于在导航任务失败的情况下,检测机器人是否已进入目标区域,目标区域为:目标位置所在的局部区域;
11、结束模块,用于若机器人已进入目标区域,则结束导航任务。
12、第三方面,本申请提供了一种机器人,上述机器人包括存储器、处理器以及存储在上述存储器中并可在上述处理器上运行的计算机程序,上述处理器执行上述计算机程序时实现如上述第一方面的方法的步骤。
13、第四方面,本申请提供了一种计算机可读存储介质,上述计算机可读存储介质存储有计算机程序,上述计算机程序被处理器执行时实现如上述第一方面的方法的步骤。
14、第五方面,本申请提供了一种计算机程序产品,上述计算机程序产品包括计算机程序,上述计算机程序被一个或多个处理器执行时实现如上述第一方面的方法的步骤。
15、本申请与现有技术相比存在的有益效果是:本申请中,机器人不再以到达原定的目标位置为进出电梯成功的唯一固定标准,而是会在以目标位置为目的点进行路径规划及移动的导航任务失败时,直接判断机器人是否已进入了该目标位置所在的局部区域,并在确定机器人已进入该目标位置所在的局部区域时,认为机器人已成功进出电梯。本申请由此可使机器人在搭梯时准确获知自己是否已成功进出电梯,减少出现因进出电梯的误判而导致后续其它任务未能顺利执行的情况。
16、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种机器人控制方法,其特征在于,所述机器人控制方法应用于机器人,所述机器人控制方法包括:
2.如权利要求1所述的机器人控制方法,其特征在于,在所述检测所述机器人是否已进入目标区域之后,所述机器人控制方法还包括:
3.如权利要求1或2所述的机器人控制方法,其特征在于,所述根据当前楼层及目标楼层确定所述机器人当前的目标位置,包括:
4.如权利要求3所述的机器人控制方法,其特征在于,所述检测所述机器人是否已进入目标区域,包括:
5.如权利要求4所述的机器人控制方法,其特征在于,所述根据所述指定顶点的坐标及所述实时坐标,确定所述机器人是否已进入所述目标区域,包括:
6.如权利要求5所述的机器人控制方法,其特征在于,所述将所述第二向量投影至所述第一向量上,以根据投影结果确定所述机器人是否已进入所述目标区域,包括:
7.一种机器人控制装置,其特征在于,所述机器人控制装置应用于机器人,所述机器人控制装置包括:
8.如权利要求7所述的机器人控制装置,其特征在于,所述机器人控制装置还包括:
9.一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的方法。
技术总结
本申请公开了一种机器人控制方法、机器人控制装置、机器人及计算机可读存储介质。该方法应用于机器人,包括:在接收到乘梯指令后,根据当前楼层及目标楼层确定所述机器人当前的目标位置;启动导航任务,所述导航任务为:以所述目标位置为目的点进行路径规划及移动;在所述导航任务失败的情况下,检测所述机器人是否已进入目标区域,所述目标区域为:所述目标位置所在的局部区域;若所述机器人已进入所述目标区域,则结束所述导航任务。通过本申请方案,可使机器人在搭梯时准确获知自己是否已成功进出电梯。
技术研发人员:骆恒,熊友军
受保护的技术使用者:深圳市优必行科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!