一种面向任务分级目标运动特性的跟踪轨迹优化方法
本发明属于雷达,具体涉及一种面向任务分级目标运动特性的跟踪轨迹优化方法。
背景技术:
1、在现代战场环境中,将雷达组网搭载在无人机集群平台是越来越常见的侦查与反侦查手段。机载雷达执行侦察任务的时候,不仅要对目标区域进行完整的搜索,还要进一步对区域内高威胁度的重点目标进行持续性的跟踪。而当雷达与目标发生切飞情况时(径向速度为0),回波信号会湮灭在杂波中,严重影响目标跟踪性能。所以对分布式雷达网建立合理的资源分配机制、优化僚机集群的轨迹对提升目标跟踪精度至关重要。
2、上个世纪80年代至今,很多国家都致力于自动化航迹规划系统以及组网雷达发射资源协同优化分配的研究。nasa制定了实时航路规划系统anoe的研发计划。majumder等人为适应3d环境,提出在全程飞行状态下进行增量路径搜索的求解算法。普林斯顿大学学者godrich基于多输入多输出(mimo)雷达平台提出了一种功率分配方法,以满足目标定位精度需求为约束,减少发射功率。在国内方面,东南大学曾勇等人将无人机作为通信平台,提出航迹规划方案以提升通信性能。面向多目标定位与跟踪任务,电子科技大学易伟教授针对mimo雷达提出了一种资源按需分配算法,以期以最小的发射功率实现多目标保精度跟踪。西安电子科技大学严俊坤教授构建了以最小化总资源消耗和多目标定位/跟踪误差为目标的向量优化模型,可对系统发射资源进行按需分配管理,同时还提出一种组网雷达功率分配方法,可有效推远杂波背景下的目标跟踪距离,针对异步工作条件下的单目标跟踪任务,提出了相应的组网雷达资源分配方法,可显著提升目标的跟踪精度。
3、总体来讲,国内外很多学者针对不同应用条件,在优化僚机集群的轨迹方向以提高跟踪精度以及系统的资源分配做了大量研究工作,但目前的轨迹优化工作只针对特定简单的场景进行了探索,僚机集群的工作方式只是对单独僚机的简单复制,与僚机集群的分布式探测背景结合不够,在总资源有限情况下对各僚机的资源分配不够精细等问题。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种面向任务分级目标运动特性的跟踪轨迹优化方法。本发明要解决的技术问题通过以下技术方案实现:
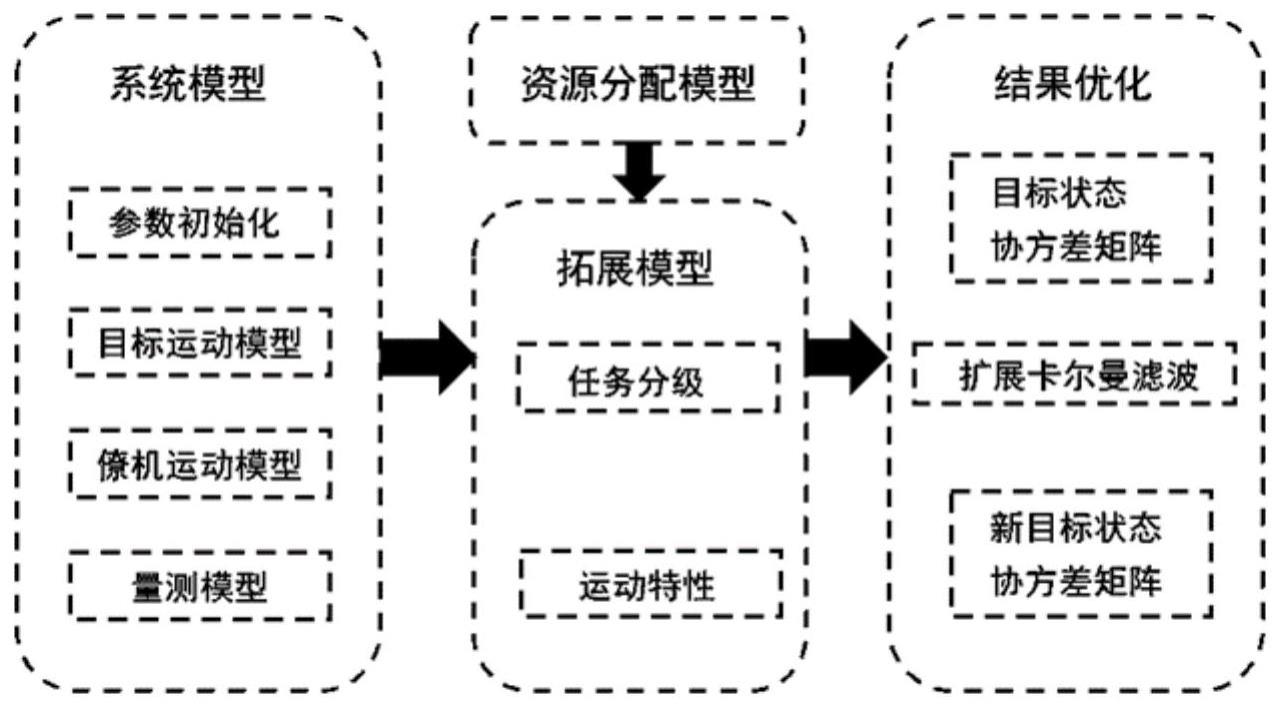
2、本发明提供了一种面向任务分级目标运动特性的跟踪轨迹优化方法,包括:
3、步骤1:基于singer运动模型建立目标运动模型;
4、步骤2:建立僚机运动模型,其中第i架僚机在k时刻的平飞速度和转角速度作为待优化的机动控制变量
5、步骤3:根据所述目标运动模型和所述僚机运动模型,建立量测模型;
6、步骤4:根据所述量测模型,利用bcrlb确定资源分配模型,其中,在所述资源分配模型中加入威胁度系数和衰减因子中的至少一个;
7、步骤5:求解所述资源分配模型的最优解,得到各时刻各僚机的机动控制变量最优值,完成面向任务分级目标运动特性的跟踪轨迹优化。
8、在本发明的一个实施例中,所述步骤1包括:
9、设平面中存在q个以任意方式运动目标,建立目标q在k时刻的状态为:
10、
11、其中,(xt,q,k,yt,q,k)表示目标q在k时刻的位置坐标,表示目标q在k时刻的速度分量,表示目标q在k时刻的加速度分量;
12、利用singer模型动态方程和目标q在k时刻的状态,建立目标运动模型为:
13、xt,q,k+1=ft(xt,q,k,tk+1-tk)+u(tk+1-tk);
14、其中,ft(.)表示目标q的状态转移函数,表示目标在融合时刻tk的过程融合向量,服从均值为0协方差为的高斯分布;
15、
16、其中,i2表示2维单位矩阵,表示直积操作,t0=tk+1-tk表示融合时刻间隔,α表示机动频率,t表示采样周期。
17、在本发明的一个实施例中,所述步骤2包括:
18、设n个僚机在二维平面内飞行,第i架僚机在k时刻的状态为:
19、
20、其中,表示第i架僚机在k时刻的位置坐标,表示第i架僚机的在k时刻的飞行方向和x轴的夹角;
21、根据第i架僚机在k时刻的状态,得到第i架僚机的下一时刻的顺势状态转换方程为:
22、
23、根据第i架僚机的下一时刻的顺势状态转换方程,建立僚机运动模型为:
24、
25、其中,表示在k-1时刻全部僚机的状态向量,dk表示k时刻所有僚机的机动控制变量,表示过程噪声,服从均值为0协方差的高斯分布。
26、在本发明的一个实施例中,所述步骤3包括:
27、根据第i架僚机在k时刻的状态,以及目标q在k时刻的状态,建立量测函数为:
28、
29、其中,ri,k,q表示k时刻第i架僚机对目标q的距离量测值,θi,k,q表示k时刻第i架僚机对目标q的方位角量测值;
30、根据所述量测函数,建立量测模型为:
31、
32、其中,wi,k,q表示k时刻第i架僚机对目标q的量测值的量测噪声,服从均值为0,协方差为σi,k,q的高斯分布;
33、
34、
35、其中,表示k时刻第i架僚机对目标q的距离测量值的测量方差,表示k时刻第i架僚机对目标q的方位角测量值的测量方差,βi表示第i架僚机的雷达的发射信号带宽,bi分别表示第i架僚机的雷达的3db接收波束宽度,snri,k,m表示k时刻第i架僚机的雷达的回波信号信噪比。
36、在本发明的一个实施例中,所述步骤4包括:
37、根据所述量测模型和所述目标运动模型,得到目标q状态的归一化估计bcrlb为:
38、f(di,k)=tr(λ·(b-1(xt,q,k+1))4×4·λt);
39、其中,tr(·)表示求迹,4×4表示取其前4×4维目标状态估计的部分,λ为归一化矩阵,b-1(xt,q,k+1)表示滤波估计的方差下界;
40、对目标q状态的归一化估计bcrlb,加入威胁度系数,实现对跟踪任务的分级,得到加入威胁度系数的bcrlb为:
41、
42、其中,ωq表示目标q的威胁度系数;
43、对目标q状态的归一化估计bcrlb,加入衰减因子避免切飞现象,得到加入衰减因子的bcrlb为:
44、
45、其中,αi,q,k+1表示衰减因子,
46、根据加入威胁度系数或加入衰减因子的bcrlb确定资源分配模型为:
47、
48、在本发明的一个实施例中,所述步骤5包括:
49、使用遗传算法求解第k时刻的资源分配模型的最优解,得到第k时刻各僚机的机动控制变量最优值;
50、根据第k时刻的量测模型的测量值和第k时刻的资源分配模型的最优解,计算出目标q在第k+1时刻的预测状态和所述预测状态对应的预测协方差矩阵;
51、根据所述预测状态及所述预测协方差矩阵,利用拓展卡尔曼滤波算法进行状态递推估计,得到目标q在第k+1时刻的状态估计值及所述状态估计值对应的协方差矩阵;
52、令k=k+1,进行循环迭代,得到各时刻各僚机的机动控制变量最优值。
53、与现有技术相比,本发明的有益效果在于:
54、1.本发明的面向任务分级目标运动特性的跟踪轨迹优化方法,考虑到不同威胁度的目标,区分重点追踪目标和非重点追踪目标,对其分配不同的资源,使前者跟踪精度提高、后者跟踪精度降低以适应不同的工作场景;
55、2.本发明的面向任务分级目标运动特性的跟踪轨迹优化方法,考虑到目标与僚机出现切飞的情景。当出现切飞现象时,回波信号会湮灭在杂波中,严重影响目标跟踪性能。建立资源分配模型时加入衰减因子,能够合理规划僚机集群的追踪路径,从源头上避免切飞现象,使僚机集群能够高效的完成追踪任务;
56、3.本发明的面向任务分级目标运动特性的跟踪轨迹优化方法,在多雷达多目标系统的背景下,优化各僚机的平飞速度和转角速度,使在资源有限的条件下完成追踪的最大精度。
57、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!