一种基于backstepping的除草机器人轨迹跟踪方法
本发明涉及除草机器人,具体为一种基于backstepping的除草机器人轨迹跟踪方法。
背景技术:
1、割草机器人是智能移动机器人的重要分支,其灵感来自于智能吸尘机器人,而早在六十年代就开始了智能移动机器人的研究,对于智能移动机器人的深入研究涉及到各个方面,割草机器人是一个集动态检测、环境规划、行为指令控制与执行等多项技术于一体的智能系统,而近几年来,针对割草机器人的研究,提出了许多具有创新性和挑战性的智能技术原理,越来越多的专家、学者和工程技术人员对其愈发的关注,而当前的智能割草机器人的智能方面主要表现为避障能力,智能割草机器人的低等智能避障行为必须要有人为干预,中等智能避障行为则可以自主地识别障碍物并自行绕开障碍物;
2、如现有技术中基于backstepping方法的车式移动机器人轨迹追踪控制(陈胜)、基于backstepping方法的两轮移动机器人轨迹跟踪控制(陈滢)都公开了相关的技术方法,提出了改进的计算思路。
3、但是目前的除草机器人因其在实际除草工作过程中无法确定规定的行进路线轨迹来使除草机器人在确保覆盖所有工作区域的情况下进行除草作业,同时无法保证除草机器人在覆盖所用工作区域的情况下进行无死角的除草作业,因此,使得除草机器人在实际除草作业后,常会出现余下未进行作业的区域,而余下的未能完成的工作区域须由人工完成,从而增大了人工的成本,同时也制约了草坪机械行业的快速发展。
技术实现思路
1、本发明提供一种基于backstepping的除草机器人轨迹跟踪方法,可以有效解决上述背景技术中提出目前的除草机器人因其在实际除草工作过程中无法确定规定的行进路线轨迹来使除草机器人在确保覆盖所有工作区域的情况下进行除草作业,同时无法保证除草机器人在覆盖所用工作区域的情况下进行无死角的除草作业,因此,使得除草机器人在实际除草作业后,常会出现余下未进行作业的区域,而余下的未能完成的工作区域须由人工完成,从而增大了人工的成本,同时也制约了草坪机械行业的快速发展的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于backstepping的除草机器人轨迹跟踪方法,根据移动除草机器人的运动学模型,对移动除草机器人的轨迹跟踪控制,采用基于积分backstepping时变状态反馈方法,引入虚拟反馈量,设计机器人轨迹跟踪控制算法,利用lyapunov证明系统的稳定性和结果的有效性;
3、该轨迹跟踪方法具体包括如下步骤:
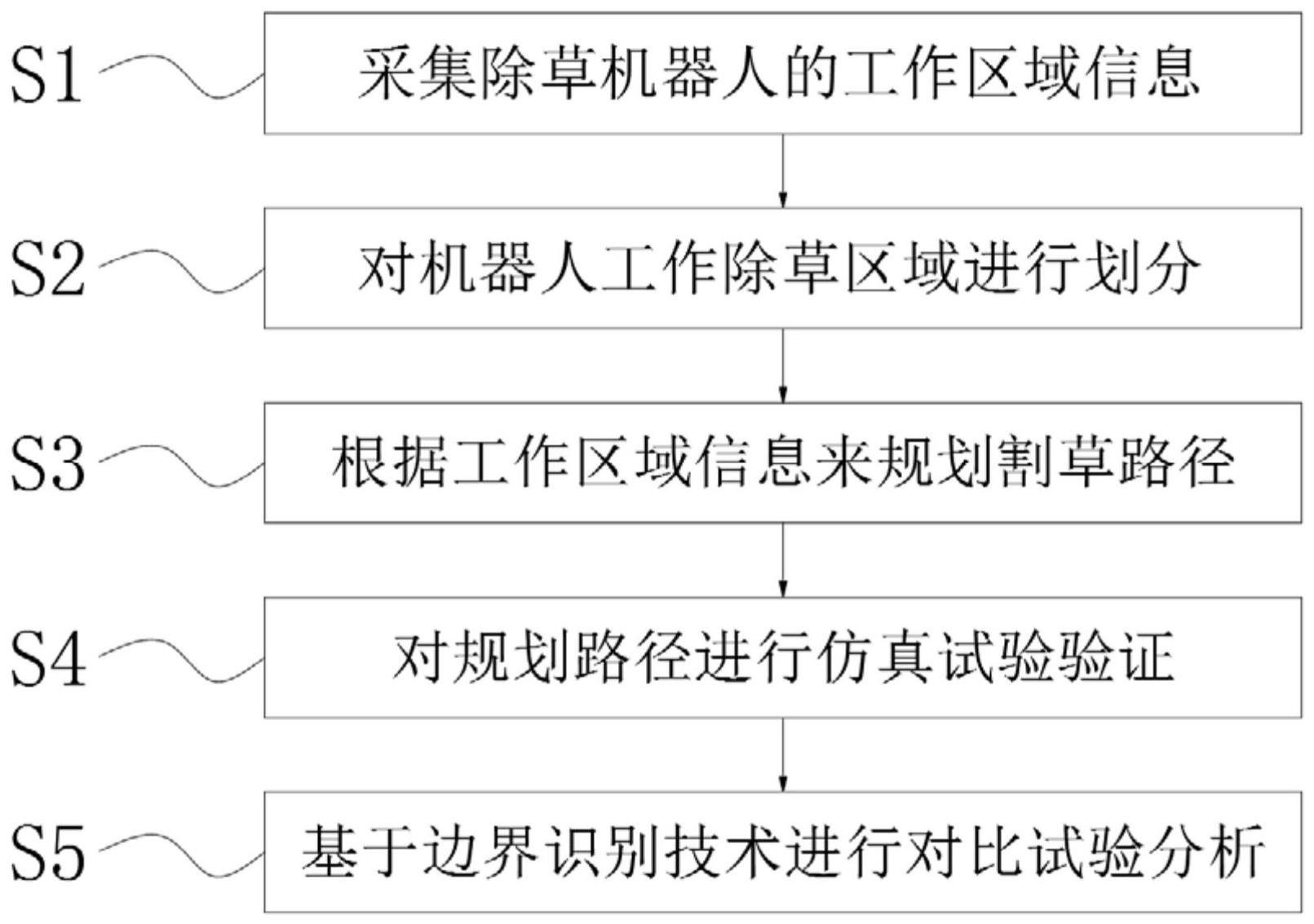
4、s1、采集除草机器人的工作区域信息;
5、s2、对机器人工作除草区域进行划分;
6、s3、根据工作区域信息来规划割草路径;
7、s4、对规划路径进行仿真试验验证;
8、s5、基于边界识别技术进行对比试验分析。
9、根据上述技术方案,所述s1中,采集除草机器人的工作区域信息主要是指通过采集设备来对除草机器人的实际除草工作区域进行信息采集;
10、在具体采集信息的过程中,采集设备主要选用全局相机或鱼眼相机,采集的工作区域主要为除草机器人的除草工作区域,其中采集的信息主要包括对工作区域内障碍物的位置信息和障碍物的边界信息,以及除草机器人工作区域的边界信息。
11、根据上述技术方案,所述s2中,对机器人工作除草区域进行划分主要是指在除草机器人的工作区域内,对该除草工作区域内的障碍物区域和除草机器人的除草区域进行分割划分。
12、根据上述技术方案,在s2中,具体划分的过程中主要通过建立平面坐标系的方式来将工作区域内整合到电子地图中,并在电子地图的基础上,结合平面直角坐标系标点的方式来将障碍物区域和除草区域进行标点划分,且在标点划分的过程中,对障碍物区域的边缘位置和除草区域的边缘位置预留50厘米的缓冲区域,即除草机器人在到达该缓冲区域后便停止继续移动切割除草。
13、根据上述技术方案,在s2中,在对该除草工作区域内的障碍物区域和除草机器人的除草区域进行分割划分时,需要要考虑到除草区域的边界形状和障碍物的分布形状,通过对除草区域的边界形状和障碍物的分布形状进行划定,使除草机器人更好的进行避障。
14、根据上述技术方案,所述s3中,根据工作区域信息来规划割草路径主要是指利用backstepping方法,结合步骤s2中对机器人工作除草区域进行划分的结果信息来构造四轮移动除草机器人追踪系统的lyapunov函数;
15、并且,通过使该lyapunov函数负定,来计算得到针对该四轮移动除草机器人的轨迹追踪控制器。
16、根据上述技术方案,在s3中,在得到该四轮移动除草机器人的轨迹追踪控制器后,需要验证该类型的四轮移动除草机器人在所得轨迹追踪控制器的作用下,能够实现对给定目标进行全局渐近追踪。
17、根据上述技术方案,所述s4中,对规划路径进行仿真试验验证主要是指在得到轨迹追踪控制器后,利用提出的轨迹追踪控制器,通过四轮移动机器人对直线运动和圆周运动2种轨迹追踪的仿真实验,从而通过仿真试验来验证该轨迹追踪控制器在四轮车式移动除草机器人轨迹追踪控制中的有效性。
18、根据上述技术方案,所述s5中,基于边界识别技术进行对比试验分析主要是指在对四轮车式移动除草机器人进行仿真试验的基础上,结合移动除草机器人的边界识别技术来使移动除草机器人在脱离轨迹追踪控制的作用下,使移动除草机器人在工作区域内进行移动除草工作;
19、基于移动除草机器人的边界识别技术,使移动除草机器人在到达工作区域的边界位置附近后进行识别并转向,重复以上指令来使移动除草机器人覆盖整个工作区域的割草目标,在前进的过程中发现障碍物,移动除草机器人则会立即执行避障指令。
20、根据上述技术方案,在s5中,在移动除草机器人通过边界识别技术进行移动除草后,对移动除草机器人的移动除草路径轨迹进行记载,并将移动除草机器人基于该边界识别技术实现的移动除草轨迹与基于轨迹追踪控制器所实现的移动除草轨迹进行对比,从而判断轨迹追踪控制器对移动除草机器人轨迹控制的有效性。
21、与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便:
22、1、通过对移动除草机器人进行轨迹跟踪控制,并采用backstepping方法,在两轮移动除草机器人追踪控制律设计过程的基础上,构造四轮移动机器人追踪系统的lyapunov函数,进而方便通过计算来得到针对四轮移动机器人轨迹追踪控制器,且通过该轨迹追踪控住器,使移动除草机器人在轨迹追踪控制器的作用下,能实现对给定目标的进行全局渐近追踪,从而便于移动除草机器人按照规定的控制轨迹进行除草作业,确保了移动除草机器人在覆盖所有除草工作区域的情况下能够进行全面有效的除草作业,避免除草后出现未进行除草作业的区域,使移动除草机器人的除草过程无需人工的参与,保证了移动除草机器人除草作业的效率。
23、2、通过对机器人工作除草区域进行划分,方便及时对该除草工作区域内的障碍物区域和除草机器人的除草区域进行分割划分,且在划分的过程中,通过对障碍物区域的边缘位置和除草区域的边缘位置预留缓冲区域,方便在除草机器人在到达该缓冲区域后便停止继续移动切割除草,从而实现了增加缓冲保护的手段,来防止除草机器人在除草作业过程中受损,也极大程度上提高了除草机器人的避障反应时间,同时通过对除草区域的边界形状和障碍物的分布形状进行划定,使除草机器人能够更好的进行避障,便于更有效的对其进行避障保护。
24、3、通过对移动除草机器人的规划路径进行仿真试验验证,实现了通过仿真试验的手段来验证该轨迹追踪控制器在四轮车式移动除草机器人轨迹追踪控制中的有效性,同时结合移动除草机器人的边界识别技术,方便将移动除草机器人基于该边界识别技术实现的移动除草轨迹与基于轨迹追踪控制器所实现的移动除草轨迹进行对比,便于进一步更准确的判断轨迹追踪控制器对移动除草机器人轨迹控制的有效性和精准性,以便后续在确保移动除草机器人安全的情况下进行除草作业。
- 还没有人留言评论。精彩留言会获得点赞!