一种基于多种控制方式的拍照机器人控制系统的制作方法
本技术涉及机器人控制,具体是一种基于多种控制方式的拍照机器人控制系统。
背景技术:
1、随着科技的进步,为了使拍照手段更加方便,拍照机器人诞生,为使用者进行自动拍照,目前现有的拍照机器人控制时控制方式较为死板,采用非拍照人员控制进行拍照,无法做到一次获得拍照人员满意的拍照效果,费时费力,且无法由拍照人员自己进行控制,导致无法获得满意拍照效果的问题,并且由于功能的增加,导致控制手段繁多,电量的损耗增加,错杂的控制指令容易导致机器人出现瘫痪的现象,因此有待改进。
技术实现思路
1、本实用新型实施例提供一种基于多种控制方式的拍照机器人控制系统,以解决上述背景技术中提出的问题。
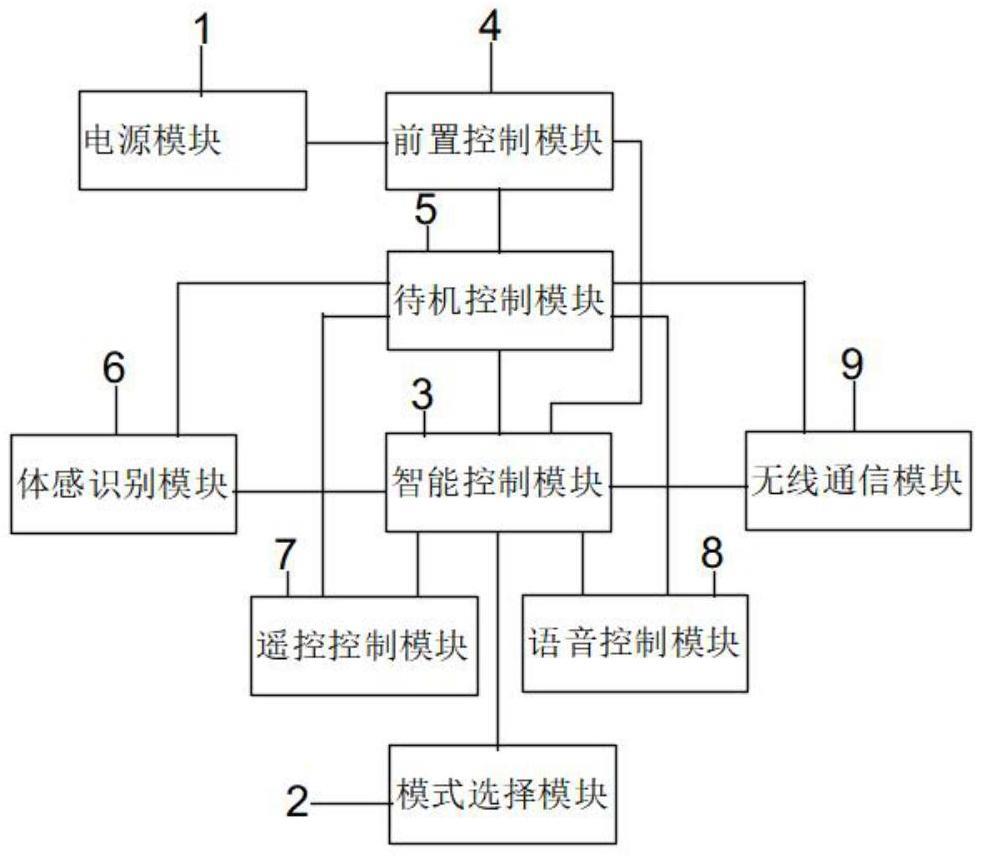
2、依据本实用新型实施例中,提供一种基于多种控制方式的拍照机器人控制系统,该基于多种控制方式的拍照机器人控制系统包括:电源模块,模式选择模块,智能控制模块,前置控制模块,待机控制模块,体感识别模块,遥控控制模块,语音控制模块,无线通信模块;
3、所述电源模块,用于提供所需电能;
4、所述模式选择模块,与所述电源模块连接,用于通过按键电路输出电平信号;
5、所述智能控制模块,用于接收电平信号,用于输出控制信号并控制各个模块的工作,用于建立数据通信通道;
6、所述前置控制模块,与所述智能控制模块和电源模块连接,用于接收所述控制信号并隔离控制功率管的导通,用于直接控制待机控制模块的工作;
7、所述待机控制模块,与所述前置控制模块和智能控制模块连接,用于接收所述智能控制模块输出的控制信号,用于根据控制信号对所述体感识别模块,遥控控制模块,语音控制模块和无线通信模块进行待机选择控制;
8、所述体感识别模块,与智能控制模块和待机控制模块连接,用于通过体感检测装置进行人体体感识别;
9、所述遥控控制模块,与智能控制模块和待机控制模块连接,用于通过遥控装置接收遥控控制指令;
10、所述语音控制模块,与智能控制模块和待机控制模块连接,用于通过语音识别装置接收语音控制指令;
11、所述无线通信模块,与智能控制模块和待机控制模块连接,用于通过无线通信芯片与所述智能控制模块建立无线通信网络。
12、与现有技术相比,本实用新型的有益效果是:本实用新型基于多种控制方式的拍照机器人控制系统采用体感识别控制、遥控控制、语音控制和无线控制,四种控制方式完成对拍照机器人的拍照控制,同时为了避免出现同时控制导致系统程序的错乱,通过待机控制模块可将不需要的控制手段进行待机控制,提高智能控制模块的控制优先级,提高程序的容错性,且降低该拍照机器人的电量损耗,并且该待机控制手段采用隔离控制,避免模块之间的干扰。
技术特征:
1.一种基于多种控制方式的拍照机器人控制系统,其特征在于,
2.根据权利要求1所述的一种基于多种控制方式的拍照机器人控制系统,其特征在于,所述前置控制模块包括第二电阻、第三电阻、第一光耦、第四电阻、第七电阻、第四电容、第一功率管、第一二极管和第五电容;所述智能控制模块包括第一控制器;
3.根据权利要求2所述的一种基于多种控制方式的拍照机器人控制系统,其特征在于,所述前置控制模块还包括第一开关、第一电阻;
4.根据权利要求2所述的一种基于多种控制方式的拍照机器人控制系统,其特征在于,所述待机控制模块包括第五电阻、第六电阻、第二光耦、第八电阻、第十三电阻、第二功率管;
5.根据权利要求4所述的一种基于多种控制方式的拍照机器人控制系统,其特征在于,所述待机控制模块还包括第三待机控制电路、第四待机控制电路和第二待机控制电路;
6.根据权利要求2所述的一种基于多种控制方式的拍照机器人控制系统,其特征在于,所述模式选择模块包括第一电源、第九电阻、第十电阻、第十一电阻、第十二电阻、第六电容、第一选择开关、第二选择开关、第三选择开关和第四选择开关;
技术总结
本技术公开了一种基于多种控制方式的拍照机器人控制系统,涉及机器人控制技术领域,包括电源模块,用于供电;模式选择模块,用于模式选择;智能控制模块,用于接收信号、控制模块工作和建立数据通信通道;前置控制模块,用于直接控制待机电源输入;待机控制模块,用于待机选择控制;体感识别模块,用于体感识别控制;遥控控制模块,用于遥控控制;语音控制模块,用于语音识别控制;无线通信模块,用于建立通信网络。本技术基于多种控制方式的拍照机器人控制系统采用体感识别控制、遥控控制、语音控制和无线控制拍照机器人,为了避免出现系统程序的错乱,通过待机控制模块可将不需要的控制手段进行待机控制,降低机器人的电量损耗。
技术研发人员:孟坤,辛星,石明岩,董建涛
受保护的技术使用者:济南鑫贝西生物技术有限公司
技术研发日:20220519
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!