信号采集电路的制作方法
1.本实用新型涉及信号采集技术领域,尤其涉及一种信号采集电路。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发水下的重要工具。水下机器人需要在控制台上的操纵设备的控制下才能在水下进行检测工作,控制台上的操纵设备的数据参数需要远传至远程终端,然而,当用于传输该数据参数的电路出现故障或其他问题时,水下机器人将无法继续进行正常的工作,使得水下机器人的工作效率降低。
技术实现要素:
3.基于此,有必要针对上述问题,提出了一种信号采集电路。
4.一种信号采集电路,应用于水下自机器人,包括:
5.信号传输电路,与主控电路连接,用于将所述控制台上的操纵设备的数据参数传输给所述主控电路,所述操纵设备用于控制所述水下机器人;
6.所述主控电路,与输出电路连接,用于将所述数据参数输出给所述输出电路;
7.所述输出电路,与远程终端连接,用于将所述数据参数转换成以太网信号并输出给所述远程终端;
8.所述复位电路,输入端与所述主控电路的输出端连接,输出端与所述输出电路的复位端连接,用于向所述输出电路输出所述主控电路发送的复位信号,并对所述输出电路进行复位。
9.在一个实施例中,所述的信号采集电路还包括:
10.指示电路,输入端与所述主控电路的输出端连接,输出端与指示元件连接,用于向所述指示元件输出所述主控电路发送的控制信号,并控制所述指示元件点亮或发声。
11.在一个实施例中,所述信号传输电路包括:
12.多个第一传输电路,输入端与所述控制台上的按钮连接,输出端与所述主控电路连接,用于将所述按钮的开关量信号传输给所述主控电路;
13.多个第二传输电路,输入端与电位器连接,输出端与所述主控电路连接,用于将所述电位器的电压信号传输给所述主控电路;
14.多个第三传输电路,输入端与所述控制台上用于控制水下机器人的的操纵杆连接,输出端与所述主控电路连接,用于将所述操纵杆的状态数据传输给所述主控电路。
15.在一个实施例中,所述主控电路包括:第一芯片、第二芯片、第一连接端子和第二连接端子;
16.所述第一芯片的第一通信输入端与所述第一连接端子的第一脚连接,所述第一芯片的第一通信输出端与所述第一连接端子的第二脚连接;所述第二芯片的第一通信输入端与所述第二连接端子的第一脚连接,所述第二芯片的第一通信输出端与所述第二连接端子
的第二脚连接;所述第一连接端子的第一脚、第二脚和第三脚分别与所述第二连接端子的第二脚、第一脚和第三脚连接;
17.所述第一芯片的信号输入端和所述第二芯片的信号输入端与所述信号传输电路的输出端连接;所述第一芯片的第二通信输入端和第二通信输出端分别与所述输出电路的通信端连接;所述第一芯片的复位输出端与所述复位电路的复位输入端连接。
18.在一个实施例中,所述输出电路包括:第三芯片和第四芯片;
19.所述第三芯片的第一通信输入端与所述第一芯片的第二通信输出端连接,所述第三芯片的第一通信输出端与所述第一芯片的第二通信输入端连接;所述第三芯片的第二通信输入端与所述第四芯片的第一通信输出端连接,所述第三芯片的第二通信输出端与所述第四芯片的第一通信输入端连接;所述第四芯片的复位端与所述复位电路的输出端连接。
20.在一个实施例中,所述复位电路40包括:第一光耦和三极管;
21.所述三极管的基极与所述第一芯片的复位输出端连接,所述三极管的发射极接地,所述三极管的集电极与所述第一光耦阴极连接;所述第一光耦的阳极与外部电源连接,所述第一光耦的发射极接地,所述第一光耦的集电极与所述第四芯片的复位端输入端连接。
22.在一个实施例中,所述指示电路包括:继电器、mos管和第一二极管;
23.所述继电器的线圈的一端与所述mos管的漏极连接;所述继电器的线圈的另一端与外部电源连接;所述继电器的第一公共端与所述指示元件连接;所述继电器的第二公共端悬空;所述第一二极管的阳极与所述mos管的漏极连接;所述第一二极管的阴极与所述继电器的线圈的另一端连接;所述mos管的源极接地,所述mos管的栅极与所述主控电路的输出端连接。
24.在一个实施例中,所述第一传输电路包括:第二二极管、第二光耦、发光二极管;
25.所述第二光耦的第一阴极与所述第二二极管的阳极连接,所述第二二极管的阴极接地;所述第二光耦的第一阳极与所述按钮连接;所述第二光耦的发射极接地,所述第二光耦的集电极与所述发光二极管的阴极及所述主控电路连接,所述发光二极管的阳极与外部电源连接。
26.在一个实施例中,所述第二传输电路包括:第三二极管、第一电阻、第二电阻、第三电阻和第四电阻;
27.所述第三二极管的一端接地,另一端与所述第一电阻的一端和所述电位器连接;所述第一电阻的另一端与所述第二电阻的一端连接,所述第二电阻的另一端与所述第三电阻的一端连接,所述第三电阻的另一端与所述第四电阻的一端和所述主控电路连接,所述第四电阻另一端接地。
28.在一个实施例中,所述第三传输电路包括:第五芯片;
29.所述第五芯片的第一通信输入端及第一通信输出端与所述操纵杆连接;所述第五芯片的第二通信输入端及第二通信输出端与所述主控电路连接。
30.实施本实用新型实施例,将具有如下有益效果:
31.本技术通过信号传输电路将数据参数传输给主控电路,再由主控电路将该数据参数传输给输出电路,输出电路将该数据参数传输至远程终端进行处理及显示,当输出电路出现故障时,主控电路向复位电路发送控制输出电路复位的复位信号,使输出电路重新启
动,进而使输出电路继续进行数据参数的传输,使水下机器人继续进行相应的工作,保证了水下机器人的工作效率。
附图说明
32.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
33.其中:
34.图1为一个实施例中信号采集电路的结构框图;
35.图2为另一个实施例中信号采集电路的结构框图;
36.图3为一个实施例中第一传输电路的电路图;
37.图4为一个实施例中第二传输电路的电路图;
38.图5为一个实施例中第三传输电路的电路图;
39.图6为一个实施例中第一芯片的电路图;
40.图7为一个实施例中第二芯片的电路图;
41.图8为一个实施例中第一连接端子和第二连接端子的电路图;
42.图9为一个实施例中第三芯片的电路图;
43.图10为一个实施例中第四芯片的电路图;
44.图11为一个实施例中复位电路的电路图;
45.图12为一个实施例中指示电路的电路图。
具体实施方式
46.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
47.图1为一个实施例中信号采集电路的结构框图。参照图1,信号采集电路应用于控制水下机器人的控制台上,包括:信号传输电路10、主控电路20、输出电路30和复位电路40;其中,所述信号传输电路10与主控电路20连接,用于将所述控制台上的操纵设备的数据参数传输给所述主控电路20,所述操纵设备用于控制所述水下机器人;所述主控电路20与输出电路30连接,用于将所述数据参数输出给所述输出电路30;所述输出电路30与远程终端连接,用于将所述数据参数转换成以太网信号并输出给所述远程终端;所述复位电路40的输入端与所述主控电路20的输出端连接,输出端与所述输出电路30的复位端连接,用于向所述输出电路30输出所述主控电路20发送的复位信号,并对所述输出电路30进行复位。本技术通过信号传输电路10将数据参数传输给主控电路20,再由主控电路20将该数据参数传输给输出电路30,输出电路30将该数据参数传输至远程终端进行处理及显示,当输出电路30出现故障时,主控电路20向复位电路发送控制输出电路30复位的复位信号,使输出电路30重新启动,进而使输出电路30继续进行数据参数的传输,使水下机器人继续进行相应的
工作,保证了水下机器人的工作效率。
48.在一个实施例中,如图2所示,所述的信号采集电路,还包括:指示电路50;其中,所述指示电路50的输入端与所述主控电路20的输出端连接,输出端与指示元件连接,用于向所述指示元件输出所述主控电路20发送的控制信号,并控制所述指示元件点亮或发声。在这里,如图12所示,所述指示电路50包括:继电器k1、mos管q2和第一二极管d99;所述继电器k1的线圈的一端2与所述mos管q2的漏极连接;所述继电器k1的线圈的另一端9与外部电源连接;所述继电器k1的第一公共端5与所述指示元件连接;所述继电器k1的第二公共端6悬空;所述第一二极管d99的阳极与所述mos管q2的漏极连接;所述第一二极管d99的阴极与所述继电器k1的线圈的另一端9连接;所述mos管q2的源极接地,所述mos管q2的栅极与所述主控电路20的输出端连接。这里的指示电路50连接的指示元件主要是用于显示某种工作模式,主控电路向指示电路发送控制连接的指示元件点亮或发声的控制信号,通过指示元件的不同状态向外界指示不同的作模式。
49.在一个实施例中,所述信号传输电路10包括:多个第一传输电路101、多个第二传输电路102和多个第三传输电路103;其中,所述多个第一传输电路101的输入端与所述控制台上的按钮连接,输出端与所述主控电路20连接,用于将所述按钮的开关量信号传输给所述主控电路20;所述多个第二传输电路102的输入端与电位器连接,输出端与所述主控电路20连接,用于将所述电位器的电压信号传输给所述主控电路20;所述多个第三传输电路103的输入端与所述控制台上用于控制水下机器人的操纵杆连接,输出端与所述主控电路20连接,用于将所述操纵杆的状态数据传输给所述主控电路20。
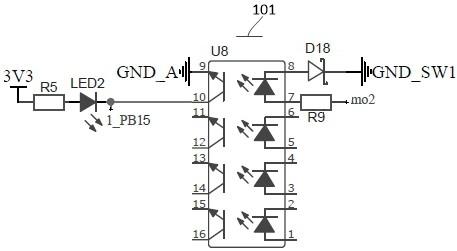
50.在上述实施例的基础上,如图3所示,所述第一传输电路101包括:第二二极管d18、第二光耦u8、发光二极管led2;其中,所述第二光耦u8的第一阴极与所述第二二极管d18的阳极连接,所述第二二极管d18的阴极接地;所述第二光耦u8的第一阳极与所述按钮连接;所述第二光耦u8的发射极接地,所述第二光耦u8的集电极与所述发光二极管led2的阴极及所述主控电路20连接,所述发光二极管led2的阳极与外部电源连接。
51.如图4所示,所述第二传输电路102包括:第三二极管d151、第一电阻r296、第二电阻r295、第三电阻r294和第四电阻r293;其中,所述第三二极管d151的一端接地,另一端与所述第一电阻r296的一端和所述电位器连接;所述第一电阻r296的另一端与所述第二电阻r295的一端连接,所述第二电阻r295的另一端与所述第三电阻r294的一端连接,所述第三电阻r294的另一端与所述第四电阻r293的一端和所述主控电路20连接,所述第四电阻r293另一端接地。
52.如图5所示,所述第三传输电路103包括:第五芯片u3;其中,所述第五芯片u3的第一通信输入端r1in及第一通信输出端t1out与所述操纵杆连接;所述第五芯片u3的第二通信输入端r1out及第二通信输出端t1in与所述主控电路20连接。
53.在一个实施例中,如图6-8所示,所述主控电路20包括:第一芯片u1、第二芯片u4、第一连接端子cn6和第二连接端子cn15;其中,所述第一芯片u1的第一通信输入端pc7与所述第一连接端子cn6的第一脚3连接,所述第一芯片u1的第一通信输出端pc6与所述第一连接端子cn6的第二脚2连接;所述第二芯片u4的第一通信输入端pc7与所述第二连接端子cn15的第一脚3连接,所述第二芯片u4的第一通信输出端pc6与所述第二连接端子cn15的第二脚2连接;所述第一连接端子cn6的第一脚3、第二脚2和第三脚1分别与所述第二连接端子
cn15的第二脚2、第一脚3和第三脚1连接;所述第一芯片u1的信号输入端和所述第二芯片u4的信号输入端与所述信号传输电路10的输出端连接;所述第一芯片u1的第二通信输入端pc11和第二通信输出端pc10分别与所述输出电路30的通信端连接;所述第一芯片u1的复位输出端pa15与所述复位电路40的复位输入端连接。
54.在一个实施例中,如图9和图10所示,所述输出电路30包括:第三芯片u40和第四芯片u28;其中,所述第三芯片u40的第一通信输入端voc与所述第一芯片u1的第二通信输出端pc11连接,所述第三芯片u40的第一通信输出端via与所述第一芯片u1的第二通信输入端pc10连接;所述第三芯片u40的第二通信输入端vic与所述第四芯片u28的第一通信输出端txd连接,所述第三芯片u40的第二通信输出端voa与所述第四芯片u28的第一通信输入端rxd连接;所述第四芯片u28的复位端rst与所述复位电路40 的输出端连接。
55.在一个实施例中,如图11所示,所述复位电路40包括:第一光耦u39和三极管q5;其中,所述三极管q5的基极与所述第一芯片u1的复位输出端pa15连接,所述三极管q5的发射极接地,所述三极管q5的集电极与所述第一光耦u39阴极连接;所述第一光耦u39的阳极与外部电源连接,所述第一光耦u39的发射极接地,所述第一光耦u39的集电极与所述第四芯片u28的复位端输入端rts连接。
56.以上所揭露的仅为本实用新型较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,仍属本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1