视日轨道追踪与四象限光电探测器结合的太阳能追踪系统的制作方法
1.本实用新型涉及光伏发电技术领域,具体为一种视日轨道追踪与四象限光电探测器结合的太阳能追踪系统。
背景技术:
2.现如今人类已经意识到太阳能的巨大潜力,并且认识到大力开发太阳能已经成为减少环境污染和应对能源问题的重要举措。全球都在积极开发新能源储能,太阳能的领用领域也越来越广泛。如太阳能房车、太阳能路灯等。但是大多数太阳能电池板只能固定一个方向照射太阳光,普遍存在着太阳能利用效率低,严重制约着太阳能的利用效率。不少追踪系统单单的利用四象限光电探测器对其采集到的信号进行放大,经过a/d转换器转换后传递给控制器,然后由控制器发出信号进行纠偏,然而这样捕捉太阳光的照射方位并不理想。
技术实现要素:
3.本实用新型的目的是提供一种视日轨道追踪与四象限光电探测器结合的太阳能追踪系统,可以有效解决背景技术中的问题。
4.实现上述目的的技术方案是:视日轨道追踪与四象限光电探测器结合的太阳能追踪系统,其特征在于:包括太阳能接收组件、储能单元、控制系统;
5.太阳能接收组件包括带有中空腔体的底座,底座内通过轴承转动安装有转轴,所述底座内还安装有步进电机,步进电机的输出端与转轴传动连接,转轴的上端向上伸出底座、并铰接有连杆,连杆外端固定连接太阳能电池板,太阳能电池板与转轴之间连接有电动推杆,电动推杆的尾端与转轴铰接、伸缩端与太阳能电池板的底部铰接;
6.所述控制系统包括gps定位模块、控制器、电压采样电路、电机驱动电路、四象限光电探测器,所述的gps定位模块与控制器连接进行串口通信,gps定位模块用于将位置数据发送至控制器,控制器根据获取位置数据和当前时间通过视日轨道追踪法计算出太阳高度角和方位角,计算出太阳偏差角度、并根据偏差角度控制步进电机对太阳能的位置进行调节;
7.所述四象限光电探测器安装在太阳能电池板的正面、并通过电压采样电路与控制器连接,所述控制器的信号输出端通过电机驱动电路连接步进电机和电动推杆,所述步进电机与驱动电路之间连接有步进电驱动器。
8.进一步地,所述控制器采用arm控制器。
9.进一步地,所述储能单元包括储能箱,储能箱内安装有蓄电池组、逆变器,所述储能箱外安装有太阳能控制器,蓄电池组通过太阳能控制器与太阳能电池板相连,所述的太阳能控制器对太阳能电池板和蓄电池组进行控制管理;所述的逆变器与蓄电池组连接,将直流电转换成交流电供交流负载使用。
10.本实用新型的有益效果:
11.与现有技术相比,本实用新型具有以下有益效果:本实用新型通过提供一种视日
轨道追踪法与四象限光电探测器相结合的太阳能追踪系统,该系统通过视日轨道追踪法计算出高度角和方位角,对太阳能电池板的角度进行一个粗调;然后arm微型控制器通过模数转换接收四象限光电探测器电路反馈电压值,并通过数模转换控制计算太阳偏差角度,实现系统精调,提高了太阳能的转换效率。
附图说明
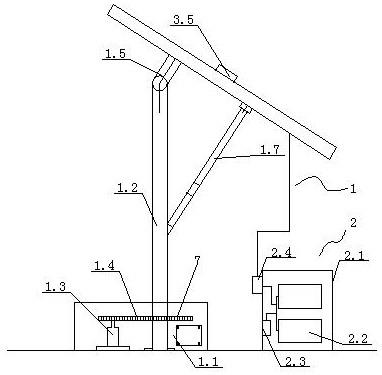
12.图1为本实用新型的结构示意图;
13.图2本实用新型的控制原理图;
14.图3为本实用新型的控制流程图。
具体实施方式
15.如图1、2所示,本实用新型包括太阳能接收组件1、储能单元2、控制系统3,太阳能接收组件1包括带有中空腔体的底座1.1,底座1.1内通过轴承转动安装有转轴1.2,所述底座1.1内还安装有步进电机1.3,步进电机1.3的输出端与转轴通过齿轮1.4传动连接,转轴1.2的上端向上伸出底座1.1、并铰接有连杆1.5,连杆1.5外端固定连接太阳能电池板1.6,太阳能电池板1.6与转轴1.2之间连接有电动推杆1.7,电动推杆1.7的尾端与转轴铰接、伸缩端与太阳能电池板1.6的底部铰接。
16.储能单元2包括储能箱2.1,储能箱2.1内安装有蓄电池组2.2、逆变器2.3,所述储能箱2.1外安装有太阳能控制器2.4,蓄电池组2.2通过太阳能控制器2.4与太阳能电池板1.6相连,所述太阳能控制器2.4对太阳能电池板1.6和蓄电池组2.2进行控制管理;所述的逆变器2.3与蓄电池组2.2连接、用于将直流电转换成交流电供交流负载使用。
17.所述控制系统3包括gps定位模块3.1、控制器3.2、电压采样电路3.3、电机驱动电路3.4、四象限光电探测器3.5,所述控制器3.2采用arm控制器,所述的gps定位模块3.1与控制器3.2连接进行串口通信,gps定位模块3.1用于将位置数据发送至控制器3.2,控制器3.2根据获取位置数据和当前时间通过视日轨道追踪法计算出太阳高度角和方位角,计算出太阳偏差角度、并根据偏差角度控制步进电机1.3对太阳能电池板1.6的位置进行调节。
18.所述四象限光电探测器3.5安装在太阳能电池板1.6的正面、并通过电压采样电路3.3与控制器3.2连接,所述控制器3.2的信号输出端通过电机驱动电路3.4连接步进电机1.3和电动推杆1.4,所述步进电机1.3与电机驱动电路3.4之间连接有步进电机驱动器3.6。
19.如图3所示,本实用新型的的工作原理如下:
20.通过gps定位模块3将采集的数据发送至arm控制器3.2,arm控制器3.2获取当前位置经纬度、当前时间,然后通过视日轨道追踪法计算出当前太阳高度角和方位角,并计算出脉冲数、分析步进电机1.3转动方向和使能信号,最终控制步进电机1.3驱动太阳能电池板1.6运行至指定位置,实现系统粗调。
21.arm控制器3.2通过电压采样电路3.3收四象限光电探测器电路3.5反馈电压值,再通过数内部模转换控制增益放大器的放大倍数,然后计算太阳偏差角度,控制电动推杆1.7的伸出,调节太阳能电池板1.6与水平面的角度,实现系统精调。
技术特征:
1.视日轨道追踪与四象限光电探测器结合的太阳能追踪系统,其特征在于:包括太阳能接收组件、储能单元、控制系统;太阳能接收组件包括带有中空腔体的底座,底座内通过轴承转动安装有转轴,所述底座内还安装有步进电机,步进电机的输出端与转轴传动连接,转轴的上端向上伸出底座、并铰接有连杆,连杆外端固定连接太阳能电池板,太阳能电池板与转轴之间连接有电动推杆,电动推杆的尾端与转轴铰接、伸缩端与太阳能电池板的底部铰接;所述控制系统包括gps定位模块、控制器、电压采样电路、电机驱动电路、四象限光电探测器,所述的gps定位模块与控制器连接进行串口通信,gps定位模块用于将位置数据发送至控制器,控制器根据获取位置数据和当前时间通过视日轨道追踪法计算出太阳高度角和方位角,计算出太阳偏差角度、并根据偏差角度控制步进电机对太阳能的位置进行调节;所述四象限光电探测器安装在太阳能电池板的正面、并通过电压采样电路与控制器连接,所述控制器的信号输出端通过电机驱动电路连接步进电机和电动推杆,所述步进电机与驱动电路之间连接有步进电驱动器。2.根据权利要求1所述的视日轨道追踪与四象限光电探测器结合的太阳能追踪系统,其特征在于:所述控制器采用arm控制器。3.根据权利要求1所述的视日轨道追踪与四象限光电探测器结合的太阳能追踪系统,其特征在于:所述储能单元包括储能箱,储能箱内安装有蓄电池组、逆变器,所述储能箱外安装有太阳能控制器,蓄电池组通过太阳能控制器与太阳能电池板相连,所述的太阳能控制器对太阳能电池板和蓄电池组进行控制管理;所述的逆变器与蓄电池组连接,将直流电转换成交流电供交流负载使用。
技术总结
视日轨道追踪与四象限光电探测器结合的太阳能追踪系统,涉及光伏发电技术领域。包括太阳能接收组件、储能单元、控制系统;太阳能接收组件包括底座,底座内转动安装有转轴,所述底座内还安装有驱动装置转动的步进电机,转轴的上端向上伸出底座、并铰接有连杆,连杆外端连接太阳能电池板,太阳能电池板与转轴之间连接有电动推杆。本实用新型通过提供一种视日轨道追踪法与四象限光电探测器相结合的太阳能追踪系统,系统通过视日轨道追踪法计算出高度角和方位角,对太阳能电池板的角度进行一个粗调;然后ARM微型控制器通过模数转换接收四象限光电探测器电路反馈电压值,并通过数模转换控制计算太阳偏差角度,实现系统精调,提高了太阳能的转换效率。太阳能的转换效率。太阳能的转换效率。
技术研发人员:曹德标 吉枳霖
受保护的技术使用者:江苏天楹资源回收有限公司
技术研发日:2022.07.31
技术公布日:2022/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1