一种墙面检测电路及移动机器人的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种墙面检测电路及移动机器人。
背景技术:
2.清洁机器人进入沿墙清洁模式时,需要与墙体保持一定沿墙距离,以便沿着墙体进行清洁。通常,清洁机器人向墙体发射沿墙检测信号,沿墙检测信号经由墙体反射回清洁机器人,根据反射的沿墙检测信号,调整自身姿态,以保证清洁机器人接收的沿墙检测信号的强度处于预设强度范围,如此来表示清洁机器人与墙体之间的距离达到期望要求。
3.墙体的墙面类型比较繁多,比如墙体的墙面可为白墙面、灰墙面或黑墙面,不同类型的墙面吸收沿墙检测信号的程度不同,导致反射回到清洁机器人的沿墙检测信号的强度也出现不同。由于现有清洁机器人无论面对何种类型的墙面,清洁机器人只能固定发射同一强度的沿墙检测信号进行检测。当清洁机器人沿着同一堵墙的不同墙面进行行走,并出现墙面类型变化时,清洁机器人为了寻求接收的沿墙检测信号的强度处于预设强度范围,需要不断地调整自身姿态,此举容易出现清洁机器人与墙体发生碰撞而损坏清洁机器人的情形,或者出现清洁机器人与墙体保持较宽的沿墙距离而降低清洁覆盖率的情形,如此会降低清洁机器人进行沿墙清洁的可靠性。
技术实现要素:
4.本实用新型实施例提供一种墙面检测电路及移动机器人,能够可靠检测墙面类型。
5.在第一方面,本实用新型实施例提供一种墙面检测电路,包括:
6.光电发射电路,包括多路挡位调节电路及光电发射管,多路所述挡位调节电路并联连接后,再在并联节点分别与所述光电发射管电连接;
7.控制器,与每路所述挡位调节电路电连接,用于选通目标挡位调节电路以驱动所述光电发射管发射墙面检测信号;
8.光电接收电路,与所述控制器电连接,用于根据所述墙面检测信号产生墙面采样信号,所述控制器根据所述墙面采样信号,确定所述墙面的类型。
9.可选的,所述控制器根据墙面类型检测顺序,在多路所述挡位调节电路中选择匹配当前墙面检测类型的挡位调节电路作为目标挡位调节电路,并控制目标挡位调节电路导通,及控制其余所述挡位调节电路断开,使得所述目标挡位调节电路与所述光电发射管形成驱动回路,以驱动所述光电发射管产生墙面检测信号。
10.可选的,当所述墙面采样信号小于所述墙面检测阈值时,所述控制器切换当前墙面检测类型,选择与切换后的当前墙面检测类型匹配的挡位调节电路作为新目标挡位调节电路,并控制所述新目标挡位调节电路导通,及控制其余所述挡位调节电路断开;
11.当所述墙面采样信号等于所述墙面检测阈值时,所述控制器确定所述墙面的类型为当前墙面检测类型;
12.当所述墙面采样信号大于墙面检测阈值时,所述控制器执行墙面远离操作,其中,所述墙面检测阈值与所述当前墙面检测类型对应。
13.可选的,每路所述挡位调节电路包括:
14.开关电路,与所述控制器电连接,用于受所述控制器的控制,可工作在导通状态或断开状态;
15.电流源电路,分别与所述开关电路和所述光电发射管电连接,当所述开关电路处于导通状态时,所述开关电路触发所述电流源电路工作,使得所述电流源电路与所述光电发射管形成驱动回路,以驱动所述光电发射管产生墙面检测信号。
16.可选的,所述开关电路包括:
17.第一电阻,所述第一电阻的一端与所述控制器电连接;
18.第二电阻,所述第二电阻的一端与所述第二电阻的另一端电连接,所述第二电阻的另一端接地;
19.第一npn型三极管,所述第一npn型三极管的基极分别与所述第一电阻的一端和所述第二电阻的一端电连接,所述第一npn型三极管的发射极接地;
20.第三电阻,所述第三电阻的一端与所述第一npn型三极管的集电极电连接,所述第三电阻的另一端与所述电流源电路电连接。
21.可选的,所述电流源电路包括:
22.第四电阻,所述第四电阻的一端用于与外部电源电连接;
23.第一pnp型三极管,所述第一pnp型三极管的发射极用于与外部电源电连接,所述第一pnp型三极管的基极与所述第一电阻的另一端电连接;
24.第二pnp型三极管,所述第二pnp型三极管的发射极与所述第一pnp 型三极管的基极电连接,所述第二pnp型三极管的基极分别与所述第一 pnp型三极管的集电极和所述开关电路电连接,所述第二pnp型三极管的集电极在所述并联节点与所述光电发射管电连接。
25.可选的,所述光电接收电路包括:
26.光电接收管,用于响应接收的墙面检测信号,产生墙面感测信号;
27.信号调理电路,分别与所述光电接收管和所述控制器电连接,用于对所述墙面感测信号进行信号调理以输出所述墙面采样信号,并将所述墙面采样信号传输给所述控制器。
28.可选的,所述信号调理电路包括信号放大电路,所述信号放大电路分别与所述光电接收管和所述控制器电连接,用于对所述墙面感测信号进行放大处理,得到所述墙面采样信号。
29.可选的,所述信号调理电路还包括稳压电路,所述稳压电路电连接在所述信号放大电路与所述控制器之间的信号输入节点,用于稳定所述信号输入节点的电压。
30.在第二方面,本实用新型实施例提供了一种移动机器人,包括如上所述的墙面检测电路。
31.本实用新型与现有技术相比至少具有以下有益效果:本实用新型实施例通过设置多路挡位调节电路,并通过选通目标挡位调节电路以驱动光电发射管发射不同档位的墙面检测信号,由于不同档位的墙面检测信号能够适应不同类型墙面的检测,因此,其能够在当前墙面类型发生切换时,可靠检测墙面类型。
附图说明
32.一个或多个实施例通过与之对应的附图中的图片仅作为示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
33.图1是本实用新型实施例提供的一种移动机器人的结构示意图;
34.图2本实用新型实施例提供的一种墙面检测电路的结构示意图;
35.图3本实用新型实施例提供的另一种墙面检测电路的结构示意图;
36.图4本实用新型实施例提供的一种墙面检测电路的检测原理示示意图;
37.图5a和5b是本实用新型实施例提供的一种墙面检测场景示意图;
38.图6a和6b是本实用新型实施例提供的另一种墙面检测场景示意图;
39.图7a和7b是本实用新型实施例提供的又一种墙面检测场景示意图;
40.图8是图1所示的挡位调节电路的结构示意图;
41.图9是图1所示的挡位调节电路的电路结构示意图;
42.图10是图1所示的光电接收电路的结构示意图。
具体实施方式
43.为了便于理解本技术,下面结合附图和具体实施方式,对本技术进行更详细的说明。需要说明的是,当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
44.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本说明书中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
45.本实用新型实施例提供的移动机器人可以任意的机器人,诸如清洁机器人、陪护机器人、送餐机器人、迎宾机器人、遥控摄像机器人、医疗机器人、军用机器人,助残机器人等等。在一些实施例中,本实用新型实施例提供的移动机器人为清洁机器人,清洁机器人可以应用于任何合适业务场景,诸如扫地、拖地、洗地或吸尘等业务场景,并且为了适应相应业务场景,清洁机器人可以被构成任意合适形状,诸如圆形、椭圆形、d字形等,清洁机器人亦可以被构造成任意合适功能,诸如路径规划功能、墙角清扫功能、贴边清扫功能、避障功能等,其中,清洁机器人包括但不限于扫地机器人、吸尘机器人、拖地机器人或洗地机器人。
46.请参阅图1,图1是本实用新型实施例提供的一种移动机器人的结构示意图。如图1所示,移动机器人100包括主控电路11、驱动组件 12、清洁组件13和墙面检测电路14。
47.主控电路11作为移动机器人100的控制核心,用于控制移动机器人100完成相关逻辑操作。
48.驱动组件12与主控电路11电连接,在本实施例中,驱动组件12 受主控电路11的控制,驱动移动机器人100前进或后退,以便完成清洁作业或回充作业等。在一些实施例中,驱动组件12包括左轮驱动单元和右轮驱动单元。以左轮驱动单元为例,左轮驱动单元包括电机、轮驱动机构和左轮,电机的转轴与轮驱动机构连接,左轮与轮驱动机构连接,电机与主
控电路11连接,电机接收主控电路11发送的控制指令而转动其转轴,并通过轮驱动机构将扭矩传输至左轮,从而实现左轮的转动。于是,在左轮驱动单元与右轮驱动单元的相互配合下,可驱动清洁机器人100前进或后退。
49.清洁组件13与主控电路11电连接,在本实施例中,清洁组件13 用于清洁地面,其可被配置成任意合适清洁结构,例如,在一些实施例中,清洁组件13包括清洁电机及辊刷,辊刷的表面设置有清洁部,辊刷通过驱动机构与清洁电机连接,清洁电机与主控电路11连接,主控电路11可以向清洁电机发送指令,控制清洁电机驱动辊刷转动,使得其清洁部能够有效地清洁地面。在一些实施例中,清洁组件13还包括集尘盒和吸尘风机,集尘盒与吸尘风机连通,且吸尘风机与主控电路11 电连接,吸尘风机接收主控电路11的控制指令而产生吸力,以便将辊刷转动时搅起的灰尘或垃圾吸入集尘盒内。
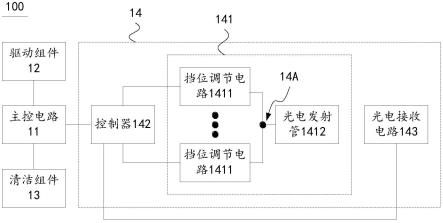
50.墙面检测电路14与主控电路11电连接,用于控制移动机器人100 实施墙面检测操作。请参阅图2,墙面检测电路14包括光电发射电路141、控制器142和光电接收电路143。
51.光电发射电路141用于发射墙面检测信号,其中,墙面检测信号可以为任意合适波形光线,例如,光线可包括可见光线和不可见光线,其中,可见光电可以为红外光线等光线。在本实施例中,如图4所示,光电发射电路141包括多路挡位调节电路1411及光电发射管1412,多路挡位调节电路1411并联连接后,再在并联节点14a分别与光电发射管 1412电连接。在本实施例中,每路挡位调节电路1411被选通时,可使得对应的驱动电流流经光电发射管1412,从而使得光电发射管1412发射对应的墙面检测信号。
52.控制器142与每路挡位调节电路1411电连接,控制器142可选通多路挡位调节电路1411中的其中一路或多路挡位调节电路1411作为目标挡位调节电路,以驱动光电发射管1412发射墙面检测信号。
53.可以理解的是,控制器142选通不同的挡位调节电路1411作为目标挡位调节电路时,流经光电发射管1412的驱动电流不同,进而,驱动光电发射管1412发射墙面检测信号的强度也不同。
54.举例而言,请参阅图3,多路挡位调节电路1411包括第一路挡位调节电路1411_1、第二路挡位调节电路1411_2和第三路挡位调节电路 1411_3。
55.当控制器142选通第一路挡位调节电路1411_1作为目标挡位调节电路时,可使得75ma的驱动电流流经光电发射管1412,从而驱动光电发射管1412发射最高强度的墙面检测信号;当控制器142选通第二路挡位调节电路1411_2作为目标挡位调节电路时,可使得50ma的驱动电流流经光电发射管1412,从而驱动光电发射管1412发射中等强度的墙面检测信号;当控制器142选通第三路挡位调节电路1411_3作为目标挡位调节电路时,可使得25ma的驱动电流流经光电发射管1412,从而驱动光电发射管1412发射最低强度的墙面检测信号。
56.光电接收电路143与控制器142电连接,光电接收电路143用于接收墙面检测信号并根据墙面检测信号产生墙面采样信号。其中,墙面采样信号包括任意模拟信号,例如电平信号、电压信号等。如前所述,光电发射电路141可发射任意合适波形光线作为墙面检测信号,则光电接收电路143可支持对应波形光线的接收,例如,当光电发射电路141向墙面发射红外光线时,光电接收电路143可接收经由墙面反射的红外光线,并根据接收到的红外光线产生墙面采样信号。
57.控制器142接收到光电接收电路143产生的墙面采样信号后,根据墙面采样信号,
确定墙面的类型。其中,墙面的类型可以为采用不同类型材质制作的墙面,诸如玻璃、木材、混凝土等,墙面的类型亦可以根据墙面的反射或吸光情况进行划分,诸如白墙、灰墙、黑墙等等。
58.以墙面的类型包括白墙、灰墙和黑墙为例,主控电路11控制移动机器人100沿墙行走或清扫的过程中,如前所述,控制器142可选通第一路挡位调节电路1411_1作为目标挡位调节电路,并接收光电接收电路143产生的墙面采样信号,根据墙面采样信号,判断墙体的类型是否为白墙,若不为白墙,则可能是灰墙或黑墙,此时,控制器142可选通第二路挡位调节电路1411_2作为目标挡位调节电路,并接收光电接收电路143产生的墙面采样信号,根据墙面采样信号,判断墙体的类型是否为灰墙,若不为灰墙,则可能是黑墙,此时,控制器142可选通第三路挡位调节电路1411_3作为目标挡位调节电路,并接收光电接收电路 143产生的墙面采样信号,根据墙面采样信号,判断墙体的类型是否为黑墙,从而可靠检测不同类型墙面。
59.总体而言,本实施例通过设置多路挡位调节电路1411,支持不同挡位调节电路1411的切换,以发射不同档位的墙面检测信号,能够适应不同类型墙面的检测,以便在当前墙面类型发生切换时,也能够可靠检测墙面类型,从而有利于移动机器人100沿着同一堵墙的不同墙面进行行走,并出现墙面类型变化时,均使得移动机器人100与墙体之间的距离满足期望要求,提高移动机器人100进行沿墙清洁的可靠性。
60.在一些实施例中,控制器142配置有墙面类型检测顺序,墙面类型检测顺序用于指示满足墙面类型检测的切换条件时,按照墙面类型检测顺序切换到另一墙面类型的检测。以墙面检测类型为白墙检测、灰墙检测和黑墙检测为例,墙面类型检测顺序可以为白墙检测-灰墙检测-黑墙检测,其中,墙面类型检测顺序可以根据实际需求进行自由设置。
61.在本实施例中,控制器142根据墙面类型检测顺序,在多路挡位调节电路1411中选择匹配当前墙面检测类型的挡位调节电路1411作为目标挡位调节电路,并控制目标挡位调节电路导通,及控制其余挡位调节电路1411断开,使得目标挡位调节电路与光电发射管1412形成驱动回路,以驱动光电发射管1412产生墙面检测信号。
62.举例而言,如前所述,假设匹配白墙检测的挡位调节电路1411为第一路挡位调节电路1411_1,匹配灰墙检测的挡位调节电路1411为第二路挡位调节电路1411_2,匹配黑墙检测的挡位调节电路1411为第三路挡位调节电路1411_3,墙面类型检测顺序为白墙检测-灰墙检测-黑墙检测,并且当前墙面类型为黑墙。
63.首先,控制器142选择第一路挡位调节电路1411_1作为目标挡位调节电路,并控制第一路挡位调节电路1411_1导通、第二路挡位调节电路1411_2和第三路挡位调节电路1411_3断开,使得第一路挡位调节电路1411_1与光电发射管1412形成驱动回路,以驱动光电发射管1412 产生最高强度的墙面检测信号,从而进入白墙检测阶段,此时,控制器 142接收光电接收电路143产生的墙面采样信号,并根据墙面采样信号确定满足墙面检测类型的切换条件。
64.接着,控制器142选择第二路挡位调节电路1411_2作为目标挡位调节电路,并控制第二路挡位调节电路1411_2导通、第一路挡位调节电路1411_1和第三路挡位调节电路1411_3断开,使得第二路挡位调节电路1411_2与光电发射管1412形成驱动回路,以驱动光电发射管1412 产生中等强度的墙面检测信号,从而进入灰墙检测阶段,此时,控制器 142
接收光电接收电路143产生的墙面采样信号,并根据墙面采样信号确定满足墙面检测类型的切换条件。
65.最后,控制器142选择第三路挡位调节电路1411_3作为目标挡位调节电路,并控制第三路挡位调节电路1411_3导通、第一路挡位调节电路1411_1和第二路挡位调节电路1411_2断开,使得第三路挡位调节电路1411_3与光电发射管1412形成驱动回路,以驱动光电发射管1412 产生最低强度的墙面检测信号,从而进入黑墙检测阶段,此时,控制器 142接收光电接收电路143产生的墙面采样信号,并根据墙面采样信号确定墙面类型为黑墙。
66.总体而言,本实施例通过配置墙面类型检测顺序,在当前墙面检测类型无法确定墙面类型时,可以切换至当前墙面检测类型在墙面类型检测顺序中的下一个墙面检测类型,以便可靠确定当前墙面类型。
67.在一些实施例中,控制器142配置有与当前墙面检测类型对应的墙面检测阈值,在每种墙面检测类型下,控制器142根据光电接收电路143 产生的墙面采样信号与对应的墙面检测类型,执行对应操作。
68.当墙面采样信号小于当前墙面检测类型对应的墙面检测阈值时,控制器142切换当前墙面检测类型,选择与切换后的当前墙面检测类型匹配的挡位调节电路作为新目标挡位调节电路,并控制新目标挡位调节电路导通,及控制其余挡位调节电路断开。
69.当墙面采样信号等于当前墙面检测类型对应的墙面检测阈值时,控制器142确定墙面的类型为当前墙面检测类型。
70.当墙面采样信号大于当前墙面检测类型对应的墙面检测阈值时,控制器142执行墙面远离操作。
71.举例而言,如前所述,墙面检测类型包括白墙检测、灰墙检测和黑墙检测,假设白墙检测对应的墙面检测阈值为w1,灰墙检测对应的墙面检测阈值为g1,黑墙检测对应的墙面检测阈值为b1,并且,在当前墙面检测类型为白墙检测时,对应的电压采样信号为a,在当前墙面检测类型为灰墙检测时,对应的电压采样信号为b,在当前墙面检测类型为黑墙检测时,对应的电压采样信号为c。
72.请参阅图4,在当前墙面检测类型为白墙检测且移动机器人100距离墙面较近的情况下,控制器142控制第一路挡位调节电路1411_1导通,以及第二路挡位调节电路1411_2和第三路挡位调节电路1411_3断开,若a大于w1,说明该墙面的类型为白墙且移动机器人100与该墙面的距离比标定的距离短,于是,控制器142执行远离操作,控制器142 反馈对应信号至主控电路11,以使主控电路11控制移动机器人100远离该墙面,直至在移动机器人100远离该墙面的过程中,a等于w1为止。
73.在当前墙面检测类型为白墙检测且移动机器人100距离墙面较近的情况下,若a等于w1,说明该墙面的类型为白墙且移动机器人100与该墙面的距离等于标定的距离,于是,控制器142执行直线沿墙操作,控制器142反馈对应信号至主控电路11,以使主控电路11控制移动机器人100按照当前的沿墙距离直线沿墙行走。
74.在当前墙面检测类型为白墙检测且移动机器人100距离墙面较近的情况下,若a小于w1,说明该墙体的类型不为白墙,此时,控制器142 将白墙检测切换至灰墙检测,即,控制第二路挡位调节电路1411_2导通,第一路挡位调节电路1411_1和第三路挡位调节电路1411_3断开。
75.由于灰墙检测、黑墙检测的过程与白墙检测类似,因此,此处不再对灰墙检测、黑墙检测的过程进行赘述。
76.请参阅图5a和图5b,假设现有清洁机器人只能发射一个档位的墙面检测信号,那么,若接收到的墙面采样信号处于预设范围,则清洁机器人可执行直线沿墙操作,然而,当当前墙面类型发生切换时,例如由白墙切换至黑墙时,接收到的墙面采样信号小于预设范围,清洁机器人为了寻求墙面采样信号处于预设范围,会执行靠近操作,进而会导致其出现撞击墙面的情况。
77.请参阅图6a和图6b,假设现有清洁机器人只能发射一个档位的墙面检测信号,那么,若接收到的墙面采样信号处于预设范围,则清洁机器人可执行直线沿墙操作,然而,当当前墙面类型发生切换时,例如由黑墙切换至白墙时,接收到的墙面采样信号大于预设范围,清洁机器人为了寻求墙面采样信号处于预设范围,会执行远离操作,进而会导致其与墙面的距离过大而降低清洁覆盖率。
78.请参阅图7a和图7b,由于移动机器人100可切换地发射不同档位的墙面检测信号,如前所示,假设当前墙面检测类型为白墙检测,并且接收到墙面采样信号刚好等于白墙检测对应的墙面检测阈值,则移动机器人可执行直线沿墙操作,当当前墙面类型发生切换时,例如由白墙切换至黑墙时,由于接收到的墙面采样信号小于白墙检测对应的墙面检测阈值,于是,移动机器人100切换当前墙面检测类型为灰墙检测,此时接收到墙面采样信号小于灰墙检测对应的墙面检测阈值,则移动机器人 100再切换当前墙面检测类型为黑墙检测,若接收到的墙面采样信号刚好等于黑墙检测对应的墙面检测阈值,则移动机器人100执行直线沿墙操作。
79.总体而言,本实施例能够在当前墙面检测类型下,根据墙面采样信号与当前墙面检测类型对应的墙面检测阈值,执行对应的操作,确保移动机器人100进行沿墙行走时,遇到各种类型墙面均能够与当前类型墙面保持标定的距离继续沿墙行走,避免移动机器人100在墙面类型切换时,出现撞击墙面或离墙面较远的情况。
80.在一些实施例中,请参阅图8,每路挡位调节电路1411包括开关电路14111和电流源电路14112。
81.开关电路14111与控制器142电连接,开关电路14111受控制器142 的控制,可工作在导通状态或断开状态。在本实施例中,开关电路14111 可以采用任意合适开关器件或电子开关,诸如按键开关、三极管等。
82.电流源电路14112分别与开关电路14111和光电发射管1412电连接,当开关电路14111处于导通状态时,开关电路14111可触发电流源电路14112工作,使得电流源电路14112与光电发射管1412形成驱动回路,以驱动光电发射管1412产生墙面检测信号。在本实施例中,电流源电路14112工作时,可使得流经光电发射管1412的驱动电流是恒定的,从而驱动光电发射管1412可靠产生墙面检测信号,其中,电流源电路14112包括由任意电路拓扑构造而成的电流源电路,诸如镜像电流源、比例电流源、微电流源等。
83.在一些实施例中,开关电路14111包括第一电阻、第二电阻、第三电阻和第一npn型三极管,第一电阻的一端与控制器142电连接,第一电阻的另一端分别与第二电阻的一端和第一npn型三极管的基极电连接,第二电阻的另一端接地,第一npn型三极管的发射极接地,第一npn型三极管的集电极与电流源电路14112电连接。
84.请参阅图9,以多路挡位调节电路1411包括第一路挡位调节电路1411_1、第二路挡位调节电路1411_2和第三路挡位调节电路1411_3为例,对于第一路挡位调节电路1411_1的开关电路14111,第一电阻、第二电阻、第三电阻和第一npn型三极管分别对应电阻r1、电阻r2、电阻r3和三极管q1,对于第二路挡位调节电路1411_2的开关电路 14111,第一电阻、第二电阻、第三电阻和第一npn型三极管分别对应电阻r4、电阻r5、电阻r6和三极管q2,对于第三路挡位调节电路1411_3 的开关电路14111,第一电阻、第二电阻、第三电阻和第一npn型三极管分别对应电阻r7、电阻r8、电阻r9和三极管q3。
85.在一些实施例中,电流源电路14112包括第四电阻、第一pnp型三极管和第二pnp型三极管,第四电阻的一端分别与外部电源vcc和第一 pnp型三极管的发射极电连接,第四电阻的另一端分别与第一pnp型三极管的基极和第二pnp型三极管的发射极电连接,第一pnp型三极管的集电极分别与第二pnp型三极管的基极和开关电路14111电连接,第二 pnp型三极管的集电极与光电发射管1412电连接。
86.如图9所示,以多路挡位调节电路1411包括第一路挡位调节电路 1411_1、第二路挡位调节电路1411_2和第三路挡位调节电路1411_3为例,对于第一路挡位调节电路1411_1的电流源电路14112,第四电阻、第一pnp型三极管和第二pnp型三极管分别对应电阻r10、三极管q4和三极管q5,对于第二路挡位调节电路1411_2的电流源电路14112,第四电阻、第一pnp型三极管和第二pnp型三极管分别对应电阻r11、三极管q6和三极管q7,对于第三路挡位调节电路1411_3的电流源电路 14112,第四电阻、第一pnp型三极管和第二pnp型三极管分别对应电阻r12、三极管q8和三极管q9。
87.下面结合图9对每路挡位调节电路1411的工作原理进行阐述。以第一路挡位调节电路1411_1为例,当控制器142选通第一路挡位调节电路1411_1时,控制器142输出一个高电平信号,使得三极管q1导通,三极管q1导通后,三极管q3的发射极与基极形成压降,从而三极管q3 也导通,三极管q3导通后,三极管q2与随即导通,从而,电阻r4、三极管q2和三极管q3构成一个恒流源,使得恒定的驱动电流流经光电发射管1412。可以理解的是,在外部电源vcc的电压一定时,通过设置电阻r4的阻值,可设定驱动电流的大小。
88.因此,通过合理设置电阻r10、电阻r11和r12的阻值,当任一挡位调节电路1411被选通时,会有对应恒定的驱动电流流经光电发射管 1412,从而驱动光电发射管1412发射对应强度的墙面检测信号。
89.在一些实施例中,请参阅图10,光电接收电路143包括光电接收管1431和信号调理电路1432。
90.光电接收管1431可响应接收到的墙面检测信号,产生墙面感测信号。在本实施例中,光电接收管1431用于光电转换,即将接收到的光信号转换成电信号。
91.信号调理电路1432分别与光电接收管1431和控制器142电连接,信号调理电路1432可对墙面感测信号进行信号调理以输出墙面采样信号,并将墙面采样信号传输给控制器142,以便控制器142根据墙面采样信号,确定墙面的类型。在一些实施例中,光电接收管1431可以为任意可光信号转换成电信号的光电传感器件,例如光电二极管、光电三极管等等。
92.在本实施例中,由于控制器142不便于处理光电接收管1431产生的墙面感测信号,因此,通过对墙面感测信号进行调理,能够方便控制器142进行相关信号处理。
93.在一些实施例中,请参阅图10,信号调理电路1432包括信号放大电路14321,信号放大电路14321分别与光电接收管1431和控制器142 电连接,用于对墙面感测信号进行放大处理,得到墙面采样信号。
94.具体的,信号放大电路14321包括电阻r13、电阻r14和运算放大器u1,电阻r13的一端分别与运算放大器u1的第一输入端和电阻r14 的一端电连接,电阻r13的另一端接地,运算放大器u1的第二输入端与光电接收管1431电连接,运算放大器u1的输出端分别与控制器142 和电阻r14的另一端电连接。在一些实施例中,运算放大器u1的第一输入端为反相输入端,运算放大器u1的第二输入端为同相输入端。
95.在一些实施例中,请再次参阅图10,信号调理电路1432还包括第一滤波电路14322,第一滤波电路14322分别与运算放大器u1的第一输入端与运算放大器u1的输出端电连接。
96.具体的,第一滤波电路14322包括电容c1,电容c1的一端与运算放大器u1的第一输入端电连接,电容c1的另一端与运算放大器u1的输出端电连接。
97.在一些实施例中,请再次参阅图10,信号调理电路1432还包括第一限流电路14323,第一限流电路14323分别与光电接收管1431和运算放大器u1的第二输入端电连接,第一限流电路14323用于限制从光电接收管1431流入运算放大器u1的第二输入端的电流。
98.具体的,第一限流电路14323包括电阻r15,电阻r15的一端与光电接收管1431电连接,电阻r15的另一端与运算放大器u1的第二输入端电连接。
99.在一些实施例中,请再次参阅图10,信号调理电路1432还包括稳压电路14324,稳压电路14324连接在信号放大电路14321与控制器142 之间的信号输入节点,用于稳定信号输入节点的电压。
100.具体的,稳压电路14324包括稳压二极管d1,稳压二极管d1的阳极连接于信号输入节点,稳压二极管d1的阴极与外部电源电连接。
101.在一些实施例中,请再次参阅图10,信号调理电路1432还包括第二限流电路14325,第二限流电路14325分别与信号放大电路14321和控制器142电连接,第二限流电路14325用于限制从信号放大电路14321 流入控制器142的电流。
102.具体的,第二限流电路14325包括电阻r16,电阻r16的一端与信号放大电路14321电连接,电阻r16的另一端与控制器142电连接。
103.在一些实施例中,请再次参阅图10,信号调理电路1432还包括第二滤波电路14326,第二滤波电路14326连接在信号放大电路14321与控制器142之间的信号输入节点,用于对信号输入节点的电压进行滤波。
104.具体的,第二滤波电路14326包括电容c2,电容c2的一端连接于信号输入节点,电容c2的另一端接地。
105.最后要说明的是,本实用新型可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本实用新型内容的额外限制,提供这些实施方式的目的是使对本实用新型的公开内容的理解更加透彻全面。并且在本实用新型的思路下,上述各技术特征继续相互组合,并存在如上所述的本实用新型不同方面的许多其它变化,均视为本实用新型说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护
范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1