用于自动驾驶开发的域控制器套件的制作方法
1.本实用新型涉及汽车电子技术领域,具体涉及一种用于自动驾驶开发的域控制器套件。
背景技术:
2.随着汽车电子化程度越来越高,车上的ecu数量也越来越多,甚至一些车上的ecu数量已经超过一百个。如此多的ecu,它们之间还要相互通信,让这么多ecu在整车上有条不紊地协调工作,有非常大的挑战。传统的做法是车上需要增加一个新的功能时就需要增加一个ecu,比如驾驶辅助系统就包括前向碰撞预警ecu、交通识别ecu、辅助泊车ecu等。加入一个新的ecu势必会打破整车原有的网络拓扑结构,也会给整车线束布置带来新的挑战。
3.引入域控制器后,可以大量减少ecu的数量。域控制器,简单来说就是把功能相近的多个传统ecu,集中到一个算力和资源都很强大的控制器里,这个控制器被称为域控制器,所以这里的域指的是功能域。该控制器需要包含多个传统ecu的功能,每个传统ecu对应域控制器里的一个或多个应用程序,而控制执行器的底层驱动由域控制器统一管理。域控制器之间通过can fd,flexray或者车载以太网等高速率总线进行通信,如此可以降低整车网络拓扑的复杂性,同时也能减少整车线束数量。而且域控制器具有良好的扩展性,需要引入新功能时只需要在现有的域控制器上开发即可,ota空中下载功能,也让车载软件更新更加便捷。
4.在实现本实用新型创造的过程中,发明人发现现有技术中至少存在如下问题:
5.在一些汽车自动驾驶项目开发初期阶段,由于没有完整的域控制器,需要大量的线束将相关的mcu(microcontroller unit,单片机)开发板和soc(system on chip,系统级芯片,或称片上系统)开发板连接并分别进行供电。同时,域控制器的运算需要多路环境数据信息输入。其中,传统汽车电子can信号收发功能均在mcu实现,域控制器发展过程中,有些can信号(例如时间敏感can信号)需要传递到soc。现有市场方案一般是先将can信号传递到mcu,再通过mcu传给soc,信号的延时较长。同时,传统以太网无法满足汽车自动驾驶对时间确定性的要求。上述问题都会加大域控制器开发阶段的工作量和难度。
6.因此需要一种用于自动驾驶开发的域控制器套件,以至少部分地解决上述技术问题。
技术实现要素:
7.为了至少解决现有技术中的问题之一,本技术提出了一种用于自动驾驶开发的域控制器套件。
8.在根据本实用新型的一种用于自动驾驶开发的域控制器套件的具体实施方式中,其包括:mcu及与所述mcu信号连接的soc,所述mcu可接收外部的can信号;所述套件还包括:can收发电路,所述can收发电路将至少部分的外部can信号可直接传输至所述soc;和tsn交换机,所述tsn交换机的一端信号连接至所述mcu,所述tsn交换机的另一端信号连接至所述
soc。
9.根据本实用新型的用于自动驾驶开发的域控制器套件,正常情况下,外部的can信号可以全部传输至mcu。其中一些can信号(例如时间敏感can信号)可以通过can收发电路直接传输给soc,相比于现有的通过mcu传输给soc的方式,减少了传输时间。tsn交换机,即支持实时tsn(time-sensitive network,时间敏感网络)以太网的交换机,用来实现mcu和soc之间的实时数据传输,满足汽车自动驾驶对时间确定性的要求。
10.可选地,所述can收发电路包括:
11.滤波电路,用于对所述can信号进行滤波;
12.can收发器,用于对经滤波后的所述can信号转换为ttl电平信号并传输至所述soc。
13.可选地,所述套件还包括电源管理电路,所述电源管理电路用于向所述mcu、所述soc和所述tsn交换机供电。
14.可选地,所述套件还包括至少一个解串芯片,所述解串芯片用于对4路摄像头数据信号直接进行解串并传输至所述soc。
15.可选地,所述套件还包括:
16.一印刷线路板,所述印刷线路板用于固设所述mcu、所述soc、所述can收发电路、所述电源管理电路和所述解串芯片。或者多块可拆卸连接的印刷线路板,用于分别固设所述mcu、所述soc、所述can收发电路、所述电源管理电路和所述解串芯片。
17.可选地,所述套件还包括一外壳,所述外壳用于容纳并固定所述mcu、所述soc、所述can收发电路、所述电源管理电路、所述解串芯片和所述印刷线路板。
18.可选地,所述外壳的表面还设置有用于所述soc进行散热的开口。和/或所述外壳还预留有type-c/usb-a/视频输出端口。和/或所述外壳还预留有交换机以太网接口。
19.可选地,所述can收发器采用tja1462atk收发器。
20.可选地,所述解串芯片解串后的信号通过fakra接插件传输至所述soc。和/或所述解串芯片采用max96712芯片。
21.可选地,所述mcu采用tc397。和/或所述soc采用xavier芯片。
22.通过利用根据本实用新型实施例的技术方案,可以获得的有益效果至少在于:
23.1、can收发电路使soc也能直接接收can信号,可以减少can信号传输至soc的时长;
24.2、集成了支持实时tsn以太网的tsn交换机,用于实现mcu和soc的实时通信,可以满足汽车自动驾驶对时间确定性的要求;
25.3、使用了可直接解串4路摄像头数据信号的解串芯片,提高了解串和输入环境数据信息的能力;
26.4、外壳具有增强散热的功能,同时预留了充足的扩展接口,方便后续开发功能的拓展。
27.应当理解,前述大体的描述和后续详尽的描述均为示例性说明和解释,并不应当用作对本实用新型所要求保护内容的限制。
附图说明
28.参考随附的附图,本实用新型更多的目的、功能和优点将通过本实用新型实施方
式的如下描述得以阐明,其中:
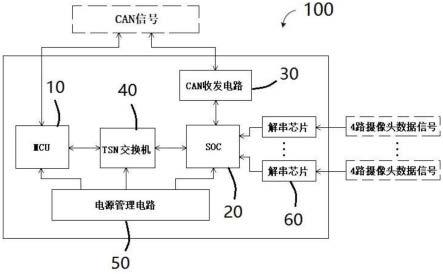
29.图1是根据本实用新型的一种优选实施方式的用于自动驾驶开发的域控制器套件的示意框图;
30.图2是根据本实用新型的一种优选实施方式的用于自动驾驶开发的域控制器套件中的can收发电路的电路原理图;以及
31.图3是根据本实用新型的一种优选实施方式的用于自动驾驶开发的域控制器套件中的外壳的示意图。
32.附图标记说明:
33.100:套件;
34.10:mcu;
35.20:soc;
36.30:can收发电路;
37.31:滤波电路;
38.32:can收发器;
39.40:tsn交换机;
40.50:电源管理电路;
41.60:解串芯片;
42.70:外壳;
43.71:开口;
44.72:type-c/usb-a/视频输出端口;
45.73:交换机以太网接口。
具体实施方式
46.通过参考示范性实施例,本实用新型的目的和功能以及用于实现这些目的和功能的方法将得以阐明。然而,本实用新型并不受限于以下所公开的示范性实施例;可以通过不同形式来对其加以实现。说明书的实质仅仅是帮助相关领域技术人员综合理解本实用新型的具体细节。
47.应予以注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
48.本实用新型中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其他含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。
49.需要说明的是,本文中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的,并非限制。
50.本实用新型提供一种用于自动驾驶开发的域控制器套件100。本实用新型提供的套件100例如可以应用在汽车开发领域,比如用于自动驾驶开发的域控制器,可以减少can
信号传输至soc的时长,满足汽车自动驾驶对时间确定性的要求。
51.在优选的实施方式中,如图1所示,套件100包括mcu10、soc20、can收发电路30和tsn交换机40。mcu10和soc20作为套件100内的计算处理单元,用于对各自接收的信号(包括can信号)进行处理,例如mcu可以采用tc397芯片,soc可以采用xavier芯片。can收发电路30用于将至少部分的can信号直接传输至soc20。tsn交换机40用来实现mcu10和soc20之间的实时数据传输。
52.具体地,如图1所示,套件100包括mcu10及与mcu10信号连接的soc20。mcu10可接收外部的can信号。套件100还包括can收发电路30。can收发电路30将至少部分的外部can信号(例如时间敏感can信号)可直接传输至soc20。套件100还包括tsn交换机40。tsn交换机40的一端信号连接至mcu10,tsn交换机40的另一端信号连接至soc20。
53.为了可以对整个套件100内部的电源域进行统一管理,套件100可以包括电源管理电路50。电源管理电路50用于向mcu10、soc20和tsn交换机40供电。其中对电源管理电路50不做限制,可以采用现有电路。
54.根据本实用新型的用于自动驾驶开发的域控制器套件100,首先外部的can信号可以全部传输至mcu10。其中一些can信号(例如时间敏感can信号)可以通过can收发电路30直接传输给soc20,相比于现有的通过mcu10传输给soc20的方式,减少了传输时间。tsn交换机40,即支持实时tsn(time-sensitive network,时间敏感网络)以太网的交换机,用来实现mcu10和soc20之间的实时数据传输,满足汽车自动驾驶对时间确定性的要求。
55.参考图2,在图示实施方式中,为了提供一种可实施的can收发电路30,can收发电路30可以包括:滤波电路31,滤波电路31用于对can信号进行滤波。can收发器32,can收发器32用于对经滤波后的can信号转换为ttl电平信号并传输至soc20。
56.本实施例的can收发电路30整体线路较简单,易于制造。其中,滤波电路31和can收发器32可以是现有的电路或元器件。当soc20接收其它节点的can信号时,can总线上的差分信号经过滤波电路31后被can收发器32接收,can收发器32内部的高速比较器将滤波后的信号转换为ttl电平信号,最终soc20内部的can控制器读取ttl电平信号并解析报文信息。
57.可以理解,本实施例中仅说明了can收发电路30可用于将can信号传输至soc20,在电子电路领域,往往电路具有双向传输信号特性。本实施例中的can收发电路30也可用于soc20向其他节点传输can信号,其过程与上述描述过程相反。当soc20向其它节点发送can信号时,soc20内部的can控制器发送ttl电平信号,ttl电平信号在can收发器32内部经过time-out定时器、信号斜率控制及驱动转换为差分信号,最终经过滤波电路31发送到can总线上。can收发器32的功能是可以实现ttl电平信号和差分信号之间的互相转换。
58.更进一步地,在本实用新型的一些实施例中,参考图2,can收发电路30的具体内容可以为:图中左侧的can_txd和can_rxd是soc上的can控制器引脚,传输的是ttl电平信号。右侧的can_h和can_l是can总线的两条差分信号线。can收发器(例如可以采用tja1462atk收发器)gnd引脚接地,vcc引脚接5v电平为收发器供电,vio引脚接3.3v电平。stb引脚连接到soc的io引脚并添加下拉电路,用于控制can收发器状态。组成共模滤波器的两个电感l1、l2一端对应分别连接can_h、can_l,另一端对应分别连接can收发器的canh引脚、canl引脚,用来虑除can双绞线的共模干扰。电阻r2和电容c3串联,组成一个rc滤波电路,用来虑除can_l线路的干扰。电阻r1和电容c3串联,组成一个rc滤波电路,用来虑除can_h线路的干
扰。接地电容c2并联在can_l线路,接地电容c1并联在can_h线路。两个d1(静电保护二极管)中一个的一端接在can_h上,另一个的一端接在can_l上,剩下的另一端共同接地,用来将可能出现的高能脉冲引向接地。
59.由于域控制器的开发需要涉及很多算法运算,特别是用于自动驾驶开发的域控制器,这就需要大量的环境数据信息,例如路况信息、行人信息和天气信息等。而目前环境数据信息一般是通过各种传感器获取,比如摄像头。现有的摄像头解串转接板都是使用max9296芯片,单颗芯片仅能解串2路摄像头数据,解串数据能力较弱,显然不能满足自动驾驶的要求。目前要获取尽量多的环境数据就需要布置很多摄像头解串转接板,这就导致电路板布局及布线非常繁琐。
60.参考图1,在图示实施方式中,为了解决上述问题,套件100还包括至少一个解串芯片60,解串芯片60用于对4路摄像头数据信号直接进行解串并传输至soc20。优选地,解串芯片60可以采用max96712。另外,解串芯片60解串后的信号可以通过fakra接插件(未示出,其为现有设备)传输至soc20。其中,本实施例中解串芯片60的数量不做限制。根据需要,解串芯片60可以是一个、两个或是多个。
61.在电子电路领域,各种电路及元器件一般是固化在印刷线路板中。因此套件100还可以包括多块可拆卸连接的印刷线路板(未示出),用于分别固设mcu10、soc20、can收发电路30、电源管理电路50和解串芯片60。这样方便制造、拆装、维保及更换。其中对于mcu10、soc20、can收发电路30、电源管理电路50和解串芯片60的具体安排可以不做限制。mcu10、soc20、can收发电路30、电源管理电路50和解串芯片60可以分别设置在一印刷线路板上,也可以各自进行随机组合然后分别设置在印刷线路板上。例如,mcu10单独设置在一印刷线路板,soc20单独设置在一印刷线路板,解串芯片60也单独设置在一印刷线路板,can收发电路30和电源管理电路50设置在一印刷线路板。
62.可以理解,从逻辑上来说,套件也可以仅设置一块印刷线路板。mcu10、soc20、can收发电路30、电源管理电路50和解串芯片60均固设在该印刷线路板上。
63.参考图3,本实用新型实施例的套件100还可以包括一外壳70。外壳70用于容纳并固定mcu10、soc20、can收发电路30、电源管理电路50、解串芯片60和印刷线路板。其中外壳70的形状不做限制,其可以为方体、圆柱体或其他形状。外壳70的材质也不做限制,可是采用金属、塑料或其他材质。
64.我们知道,soc20由于是高算力性能芯片,其计算数据量快速,导致其产生热量往往较多,故外壳70的表面还可以设置用于soc20进行散热的开口71。其中开口71优先选择位于soc20的正上方,其形状不做限制,可以为圆形、方形或者其他形状。
65.继续参考图3,根据本实用新型的用于自动驾驶开发的域控制器套件100,外壳70还可以预留type-c/usb-a/视频输出端口72和交换机以太网接口73。这样的话预留了充足的通信接口,以方便跟不同通信接口的设备进行通信,同时外壳70在交换机以太网接口处也做了开口,可以方便扩展以太网设备,进行联调。虽在图示中显示外壳70同时预留type-c/usb-a/视频输出端口72和交换机以太网接口73,在图未示的实施方案中,外壳70也可以仅预留type-c/usb-a/视频输出端口72,或者仅预留交换机以太网接口73。
66.根据本实用新型的用于自动驾驶开发的域控制器套件100,一些can信号(例如时间敏感can信号)可以通过can收发电路30直接传输给soc20,相比于现有的通过mcu10传输
给soc20的方式,减少了传输时间。tsn交换机40用来实现mcu10和soc20之间的实时数据传输,满足汽车自动驾驶对时间确定性的要求。这样可以帮助开发者快速进入实车验证阶段,加速自动驾驶研发进程,降低自动驾驶研发的资金投入和技术门槛。同时,使用新型解串芯片60,单颗芯片可同时直接解串4路摄像头数据,提高了获取环境数据信息的能力。并且,设计的外壳70散热效果好,还预留了充足的扩展接口,方便后续开发功能的拓展。
67.如图2所示,本实用新型还可以提供一种用于自动驾驶开发的域控制器的can收发电路,can收发电路将至少部分的can信号可直接传输至soc。该can收发电路可以减少can信号(例如时间敏感can信号)传输至soc的时间。
68.参考图2,can收发电路可以包括:滤波电路,滤波电路用于对can信号进行滤波。can收发器,can收发器用于对经滤波后的can信号转换为ttl电平信号并传输至soc。
69.结合这里披露的本实用新型的说明和实践,本实用新型的其他实施例对于本领域技术人员都是易于想到和理解的。说明和实施例仅被认为是示例性的,本实用新型的真正范围和主旨均由权利要求所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1