手持式无人机搜寻仪的制作方法
1.本技术涉及无人机遥控设备的技术领域,尤其涉及手持式无人机搜寻仪。
背景技术:
2.无人机是一种有动力、可控制、能携带多种设备、执行多种任务并能重复使用的飞行器。实际使用过程,无人机通常因大风、碰撞、电量不足及失控等原因而坠落,需要尽快将其寻回。
3.现有的无人机为了保障响应速度,射频大多数为2.4ghz,遥控距离近;在飞远后遥控设备收不到无人机的位置信息。另外,由于飞行过程中无人机的电机耗电严重,一旦电池缺电,无人机返航失败后会直接降落或摔落;从而导致无人机不能正常的返回位置信息。
4.虽然部分遥控器能够显示位置信息,然而,位置信息数值化,不形象,搜救人员使用不方便。
技术实现要素:
5.为了能够解决上述技术问题,本技术的技术方案提供了一种手持式无人机搜寻仪。技术方案如下:
6.本技术提供了一种手持式无人机搜寻仪,包括至少两个搜寻装置,两个搜寻装置分别设定为手持搜寻部和飞机搜寻部;所述搜寻装置包括gps单元、射频单元、声光报警单元、以及mcu单元,所述 mcu单元与所述gps单元、射频单元、声光报警单元电连接;所述手持搜寻部还包括与所述mcu单元电连接的oled单元,所述oled单元包括oled显示屏,所述oled显示屏用于显示飞机搜寻部坐标、手持搜寻部坐标、方向罗盘、以及目标距离,其中,所述目标距离为手持搜寻部与飞机搜寻部之间的直线距离。
7.具体的,所述oled显示屏还用于显示飞机搜寻部电池电压、手持搜寻部电池电压、以及声光报警状态。
8.进一步地,所述搜寻装置还包括电连接于所述mcu单元的按键单元,所述搜寻装置通过接收按键单元的指令,选定为手持搜寻部或飞机搜寻部。
9.具体的,还包括一键上下电单元,所述一键上下电单元包括一键上下电电路,所述按键单元包括开关按钮,所述开关按钮通过一键上下电电路连接于所述mcu单元。
10.特别地,所述手持搜寻部通过按键单元的按键发送声光报警指令,所述飞机搜寻部通过射频单元接收指令后开启或者关闭声光报警单元。
11.进一步地,所述mcu单元采用内核为cortex-m3的stm32f1系列 32位arm微控制器。
12.具体的,所述射频单元采用433mhz频率。
13.特别地,所述oled显示屏与所述飞机搜寻部插接配合。
14.本技术与现有技术相比所具有的有益效果是:搜寻人员携带手持搜寻部,按照oled单元,根据飞机搜寻部和手持搜寻部的坐标信息、目标距离以及方向罗盘的指示,朝向飞机搜寻部前进并进行搜寻,在目标距离3米左右或者人耳或人眼可视听的范围内,搜寻人
员通过按键单元发送声光报警指令,飞机搜寻部的声光报警单元进行报警,从而可以快速、准确地找到无人机。
附图说明
15.此处的附图被并入说明书中并构成说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理,其中:
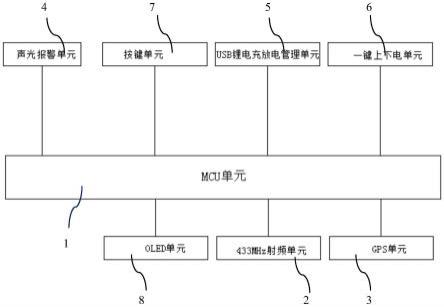
16.图1为本技术中体现搜寻装置的电路结构框图;
17.图2为本技术实施例中手持搜寻部oled显示屏的示意图。
18.附图标记:1、mcu单元;2、射频单元;3、gps单元;4、声光报警单元;5、usb锂电充放电管理单元;6、一键上下电单元;7、按键单元;8、oled单元。
具体实施方式
19.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和 /或设置之间的关系。
20.无人机是一种有动力、可控制、能携带多种设备、执行多种任务并能重复使用的飞行器。实际使用过程,无人机通常因大风、碰撞、电量不足及失控等原因而坠落,需要尽快将其寻回。
21.现有的无人机为了保障响应速度,射频大多数为2.4ghz,遥控距离近;导致飞远后收不到无人机的位置信息;再加上飞行中的无人机的电机耗电严重,一旦电池缺电,引起返航失败后直接降落或摔落;导致无人机不能正常的返回位置信息。虽然部分遥控器能够显示位置信息,然而,位置信息数值化,不形象,搜救人员使用不方便。
22.为了能够解决上述技术问题,本技术的技术方案提供了一种手持式无人机搜寻仪。技术方案如下:
23.下面根据图1至图2对本技术做进一步详细说明。
24.如图1所示,本技术提供了一种手持式无人机搜寻仪,包括至少两个搜寻装置,两个搜寻装置分别设定为手持搜寻部和飞机搜寻部,以配套使用。配套使用时,可以一对一配套使用,也可以多个手持搜寻部对一个飞机搜寻部配套使用。
25.如图1所示,搜寻装置包括mcu单元1、射频单元2、gps单元3、声光报警单元4、usb锂电充放电管理单元5、一键上下电单元6以及按键单元7。其中,mcu单元1分别与射频单元2、gps单元3、声光报警单元4、usb锂电充放电管理单元5、一键上下电单元6以及按键单元7电连接。
26.由于手持搜寻部和飞机搜寻部的物理结构和电路完全一样,软件兼容,搜寻装置通过按键单元7进行选择,按键单元7通过设定按钮进入相关功能,搜寻装置被设定为手持搜寻部或者是飞机搜寻部。实际使用时,飞机搜寻部装载在无人机上,手持搜寻部由搜寻人员握持。
27.如图1所示,进一步地,飞机搜寻部上还安装有oled单元8,oled单元8与mcu单元1
电连接,mcu处理的相关信息通过oled单元8显示为搜寻人员提供信息,方便搜寻人员查看。
28.如图2所示,oled单元8包括oled显示屏,oled显示屏与飞机搜寻部插接配合,以实现可拆卸连接。oled显示屏显示有飞机搜寻部坐标、手持搜寻部坐标、飞机搜寻部电池电压、手持搜寻部电池电压、方向罗盘、目标距离、以及声光报警状态。
29.如图1所示,其中,飞机搜寻部坐标是显示飞机的经纬度信息,实际使用过程中,根据数据可以在其他工具,例如百度地图、高德地图等显示飞机搜寻部的位置,来判断无人机坠落的大概位置和场合,进而确定是否有寻找的必要。手持搜寻部坐标是显示手持搜寻部的经纬度信息,在gps单元3的配合下,手持搜寻部坐标跟随搜寻人员的移动实时更新。
30.如图1所示,使用前,根据飞机搜寻部电池电压和手持搜寻部电池电压来判断是否需要充电,以保证搜寻装置可以正常使用。另外,显示屏上方向罗盘的垂直指向与手持搜寻部搜寻装置的物理本体一致,箭头方向与垂直指向之间的夹角为飞机搜寻部与手持搜寻部之间的角度,搜寻人员只需朝着箭头的指向寻找即可。
31.如图1所示,目标距离显示手持搜寻部与飞机搜寻部之间的距离数值,随着使用人员不断改变方位寻找无人机,此数值不断变化;当目标距离的数值越来越小时,说明搜寻人员正在靠近无人机,反之说明搜寻人员正在远离无人机。
32.如图1所示,进一步地,搜寻人员可以在手持搜寻部通过按键单元7向飞机搜寻部发送声光报警指令,令飞机搜寻部打开或者关闭声光报警功能。同时,oled显示屏上的声光报警状态显示飞机搜寻部是否开启声光报警,为防止飞机搜寻部一直报警从而引起他人注意误拿飞机,搜寻人员一般在靠近飞机搜寻部时打开声光报警以便于寻找。
33.如图1所示,mcu单元1选择stm32f1系列32位arm微控制器,内核是cortex-m3,最高72mhz工作频率,在存储器的0等待周期访问时可达1.25dmips/mhz(dhrystone2.1)。该控制器具有spi以满足oled单元8的需要、adc以满足电池电压采集功能的需要、usb2.0 全速接口满足usb锂电充放电管理单元5通信功能的需要;还具有 usart满足gps单元3的通信需要;同时他具有dma功能,外设工作不影响其他程序运行。
34.如图1所示,gps单元3和mcu单元1的usart进行数据交互,并且接收卫星信号得到飞机搜寻部和手持搜寻部的坐标位置。mcu单元1规定如果例如3秒内没有收到gps单元3更新的数据,即发动一次保存数据,如果两次收到的数据相同,在已经保存的情况下,则不保存;此保存的数据断电后不丢失;减少保存有效减少了mcu单元1 的flash擦写次数同时提高了程序的运行速度。
35.如图1所示,射频单元2实现手持搜寻部和飞机搜寻部的互相通讯,本实施例中,采用射频单元2433mhz频率。为了进一步通信数据的准确率和成功率,采取了降低带宽bw和提高扩频因子sf,并采用 lora方式以提高通信距离。
36.如图1所示,射频单元2还具有一对多和转发的功能,即存在寻找同一个飞机搜寻部的多个手持搜寻部时,在搜寻无人机的过程中,只要有一个手持搜寻部收到飞机搜寻部的信号,就会将接收到的信号转发出去,增加其他搜寻人员手中的搜寻装置的接收成功率。并且,由离无人机更近的搜寻人员进行找寻。
37.如图1所示,其中,usb锂电充放电管理单元5用于连接外部充电装置,对搜寻计内的电池进行充电,usb锂电充放电管理单元5还可以与mcu单元1进行数据的交互,包括参数设定、功能选择、地址和通讯频道设置以及固件刷新等。
38.如图1所示,按键单元7通过设定按钮进入相关功能,例如设置通讯地址和通讯信道功能。另外,按键单元7包括开关按钮,开关按钮通过一键上下电电路连接于mcu单元1,从而提高机械开关的使用寿命。
39.如图1所示,在手持搜寻部的mcu单元1中,除了根据外部信号进行上下电以外,还进行必要的能耗处理,在一段时间没有按键单元 7对射频单元2发送指令时,手持搜寻部进入睡眠模式,更长的时间没有操作则断电关机。
40.本技术的实施原理为:搜寻人员携带手持搜寻部,按照oled单元8,根据飞机搜寻部和手持搜寻部的坐标信息、目标距离以及方向罗盘的指示,朝向飞机搜寻部前进并进行搜寻,在目标距离三米左右或者人耳或人眼可视听的范围内,搜寻人员通过按键单元7发送声光报警指令,飞机搜寻部的声光报警单元4进行报警,位置信息数值化,从而可以快速、准确地找到无人机。
41.本领域技术人员在考虑说明书及实践这里发明的发明后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由权利要求指出。
42.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1