一种排水机器人控制系统及排水机器人的制作方法
本申请涉及排水设备,尤其涉及一种排水机器人控制系统及排水机器人。
背景技术:
1、目前常用的排水机器人只能通过无线遥控方式控制,当遥控系统出现故障时,机器人将无法动作。排水机器人需要面对各种现场情况,遥控器故障之后,非常麻烦。另外,在危险环境下,无法靠近救援现场查看施工现场情况,对救援造成不便,若操作者靠近机器人,对操作者人身安全存在威胁。
技术实现思路
1、本申请所要解决的技术问题在于,针对现有技术的上述不足,提出一种排水机器人控制系统及排水机器人。
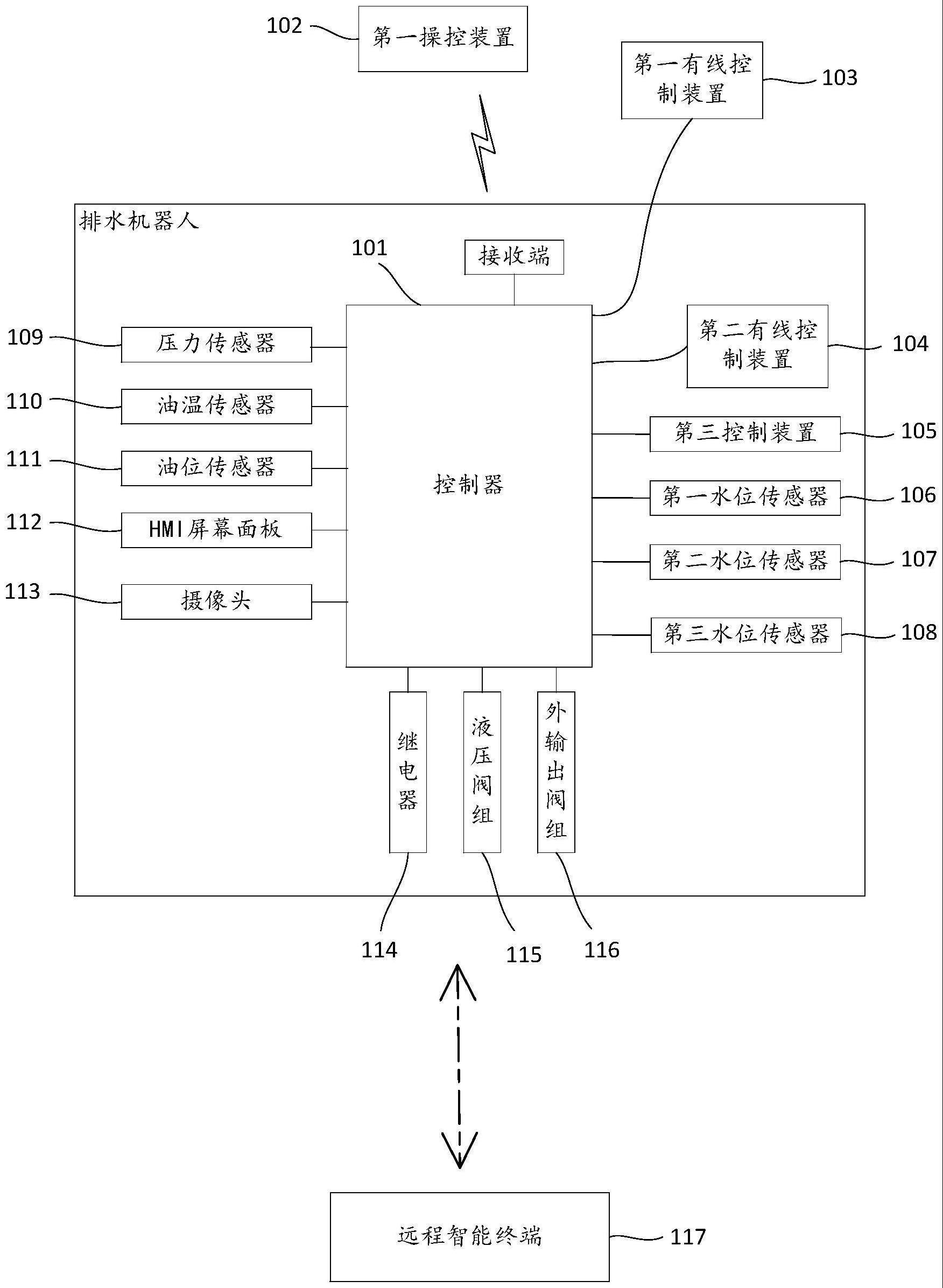
2、一种排水机器人控制系统,包括:用于控制排水机器人运行的控制器、以及用于所述控制器发送控制指令的第一操控装置、第二控制装置、第三控制装置;
3、其中,所述第一操控装置为无线控制器,与排水机器人之间无线连接;所述第二控制装置为有线控制器,通过连接线连接到排水机器人;所述第三控制装置安装在排水机器人上,并与所述控制器连接。
4、在一技术方案中,所述第二控制装置包括:第一有线控制装置和第二有线控制装置;第一有线控制装置与排水机器人之间通过第一线缆连接;所述第二有线控制装置与排水机器人之间通过第二线缆连接;其中,第一线缆的长度大于20米,第二线缆的长度小于5米。
5、在一技术方案中,所述排水机器人控制系统还包括安装在排水机器人上且与控制器相连的第一水位传感器、第二水位传感器、第三水位传感器;其中,所述第一水位传感器设置在水泵的高度位置,用于检测水泵所在的水位;所述第二水位传感器设置在发动机舱内;所述第三水位传感器设置在排水机器人上预定高度。
6、在一技术方案中,所述第三水位传感器具有两个,其中一个设置在排水机器人的前端,另一个设置在排水机器人的后端。
7、在一技术方案中,所述排水机器人控制系统还包括安装在排水机器人上的摄像头;所述摄像头与控制器相连。
8、在一技术方案中,所述排水机器人控制系统还包括用于排水机器人液压系统的压力传感器、油温传感器、油位传感器。
9、在一技术方案中,所述排水机器人控制系统连接有用于交互的hmi屏幕面板。
10、在一技术方案中,在第一操控装置、第二控制装置、第三控制装置三个遥控装置中至少一个遥控装置上设置有用于显示的运行状态的显示器。
11、在一技术方案中,所述排水机器人控制系统还包括有能够与所述控制器远程通信交互的远程智能终端。
12、另一方面,本申请提供了一种排水机器人,包括:以上部分所提供的排水机器人控制系统。
13、本申请提供了一种排水机器人控制系统,用于控制排水机器人运行。操作者可通过无线遥控方式控制机器人动作,当特殊环境下无线信号收到干扰时,可通过有线遥控方式控制机器人动作,当有线控制器出现故障时,还可以直接操作设置在排水机器人上的第三控制装置控制机器人动作,通过多种控制模式冗余设计,提高了设备的可靠性,确保救援工作顺利进行。
技术特征:
1.一种排水机器人控制系统,其特征在于,包括:用于控制排水机器人运行的控制器、以及用于所述控制器发送控制指令的第一操控装置、第二控制装置、第三控制装置;
2.根据权利要求1所述的排水机器人控制系统,其特征在于,所述第二控制装置包括:第一有线控制装置和第二有线控制装置;第一有线控制装置与排水机器人之间通过第一线缆连接;所述第二有线控制装置与排水机器人之间通过第二线缆连接;其中,第一线缆的长度大于20米,第二线缆的长度小于5米。
3.根据权利要求1所述的排水机器人控制系统,其特征在于,所述排水机器人控制系统还包括安装在排水机器人上且与控制器相连的第一水位传感器、第二水位传感器、第三水位传感器;其中,所述第一水位传感器设置在水泵的高度位置,用于检测水泵所在的水位;所述第二水位传感器设置在发动机舱内;所述第三水位传感器设置在排水机器人上预定高度。
4.根据权利要求3所述的排水机器人控制系统,其特征在于,所述第三水位传感器具有两个,其中一个设置在排水机器人的前端,另一个设置在排水机器人的后端。
5.根据权利要求1所述的排水机器人控制系统,其特征在于,所述排水机器人控制系统还包括安装在排水机器人上的摄像头;所述摄像头与控制器相连。
6.根据权利要求1所述的排水机器人控制系统,其特征在于,所述排水机器人控制系统还包括用于排水机器人液压系统的压力传感器、油温传感器、油位传感器。
7.根据权利要求1所述的排水机器人控制系统,其特征在于,所述排水机器人控制系统连接有用于交互的hmi屏幕面板。
8.根据权利要求1所述的排水机器人控制系统,其特征在于,在第一操控装置、第二控制装置、第三控制装置三个遥控装置中至少一个遥控装置上设置有用于显示的运行状态的显示器。
9.根据权利要求5所述的排水机器人控制系统,其特征在于,所述排水机器人控制系统还包括有能够与所述控制器远程通信交互的远程智能终端。
10.一种排水机器人,其特征在于,包括:如权利要求1-9任一项所述的排水机器人控制系统。
技术总结
本技术提供了一种排水机器人控制系统及排水机器人,涉及排水设备技术领域,包括:用于控制排水机器人运行的控制器、以及用于所述控制器发送控制指令的第一操控装置、第二控制装置、第三控制装置;其中,所述第一操控装置为无线控制器,与所述排水机器人之间无线连接;所述第二控制装置为有线控制器,通过连接线连接到排水机器人;所述第三控制装置安装在排水机器人上,并与所述控制器连接。本申请通过多种控制模式冗余设计,提高了设备的可靠性,确保救援工作顺利进行。
技术研发人员:周恭维,沈华龙,胡江平
受保护的技术使用者:长沙中达智能科技有限公司
技术研发日:20220926
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!