基于片上系统的EtherCAT总线型多轴驱控一体机的制作方法
基于片上系统的ethercat总线型多轴驱控一体机
【技术领域】
1.本实用新型涉及伺服驱动控制技术领域,尤其涉及一种基于片上系统的ethercat总线型多轴驱控一体机。
背景技术:
2.当前的自动化运动控制设备,如自动化流水线、数控加工机床、机器人、机械臂、机器狗、无人机等需要多个伺服、步进、直流无刷等驱动器协同工作。多个驱动器关节坐标之间需要同步实时控制,需要传输大量的数据。
3.传统的主站控制器和从站驱动器是分离的,主站控制器采用性能好的cpu性能,从站驱动器采用引脚资源紧张的mcu。由于主站控制器的cpu性能好,使用的时候没有充分利用主站控制器的性能,而从站驱动器的mcu引脚资源紧张,软件指令周期处理时间长轮询速度慢,电机算法精度不高,稳定性不好,造成主站控制器和从站驱动器没有做到有效资源分配。且主站控制器和从站驱动器之间的数据传输是采用传统的脉冲加方向io控制方式和can、485、232、422、ethernet总线。从站驱动器只能驱动一台电机,不支持一台从站驱动器的多轴控制,如果要驱动6轴或者4轴电机,则需要6个或者4个从站驱动器。这种数据传输方式已经无法满足高性能的应用场合需求。由于控制器和驱动器是分离的,调试时需要单独编程运动控制代码和配置驱动器的电机参数,电气连线时需要检查控制器和驱动器之间是否网线通讯异常;且主站控制器和从站驱动器之间因为需要通讯,还需要为了通讯设计专用的硬件驱动芯片,增加bom(bill of material,物料清单)成本。
技术实现要素:
4.本实用新型实施例旨在提供一种基于片上系统的ethercat总线型多轴驱控一体机,旨在解决目前伺服驱动控制系统的主站控制器和从站驱动器无法做到有效资源分配且支持一台从站驱动器的多轴控制的问题。
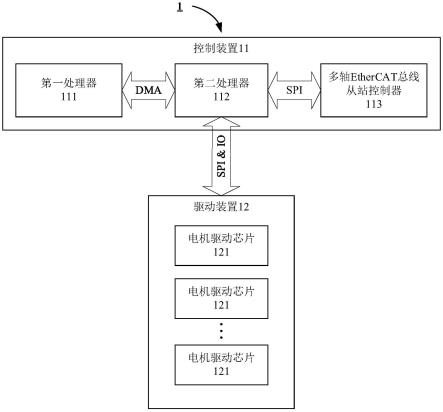
5.为解决上述技术问题,本实用新型实施例提供一种基于片上系统的ethercat总线型多轴驱控一体机,其特征在于,所述ethercat总线型多轴驱控一体机包括控制装置和驱动装置;其中:
6.所述控制装置包括第一处理器、第二处理器和多轴ethercat总线从站控制器;所述第一处理器与所述第二处理器通过直接内存访问方式交互数据,所述第二处理器与所述多轴ethercat总线从站控制器通过串行外设接口交互数据;
7.所述驱动装置包括若干电机驱动芯片,每个所述电机驱动芯片驱动一个电机;
8.所述第二处理器控制若干所述电机驱动芯片,通过串行外设接口与若干所述电机驱动芯片交互数据。
9.可选地,所述第一处理器包括媒体介入控制层接口、可变静态存储控制器接口、串行外设接口、控制器局域网络/通用异步收发传输器/串行外设接口和模数/数模/输入输出接口;
10.所述第一处理器通过串行外设接口和第三物理层芯片与上位机交互数据;
11.所述第一处理器通过所述控制器局域网络/通用异步收发传输器/串行外设接口与外部的驱动芯片实现数据交互;
12.所述第一处理器通过所述模数/数模/输入输出接口与外部的运算放大器实现信号的采集和驱动。
13.可选地,所述第二处理器包括flash存储器、实时时钟、温度传感器、集成电路总线接口、通用串行总线接口、串行外设接口和输入输出接口;其中:
14.所述flash存储器,用于存储固化数据,保存电机驱动芯片驱动电机的外围配置信息;
15.所述实时时钟,用于实时计时;
16.所述温度传感器,用于检测所述控制装置所在板卡的温度;
17.所述集成电路总线接口,与外部的eeprom存储器电性连接;所述第二处理器通过所述集成电路总线接口访问eeprom存储器;
18.所述通用串行总线接口,与外部的通用串行总线设备电性连接;
19.所述串行外设接口,与所述多轴ethercat总线从站控制器电性连接;所述第二处理器通过所述串行外设接口与所述多轴ethercat总线从站控制器交互数据;
20.所述第二处理器通过所述串行外设接口和所述输入输出接口与所述驱动装置进行数据交互。
21.可选地,所述控制装置还包括ethercat主网卡和ethercat副网卡;
22.所述ethercat主网卡通过第一物理层芯片连接所述第一处理器的媒体介入控制层接口;
23.所述ethercat副网卡通过第二物理层芯片连接所述第一处理器的可变静态存储控制器接口。
24.可选地,所述电机驱动芯片内部集成脉宽调制器、模数转换器和编码器;
25.所述脉宽调制器,用于根据所述第二处理器输出的信号控制所述驱动装置的每个电机驱动芯片驱动与其电性连接的电机轴的驱动电源和电机轴的使能抱闸信号;
26.所述模数转换器,用于采集驱动的相电流;
27.所述编码器,用于采集电机的光栅编码器反馈的abz信号。
28.可选地,所述ethercat总线型多轴驱控一体机还包括电源装置,所述电源装置分别与所述控制装置和所述驱动装置电性连接,用于将交流电源转换成直流电源,输出给所述控制装置和所述驱动装置。
29.可选地,所述ethercat总线型多轴驱控一体机还包括人机交互装置,所述人机交互装置与所述控制装置和所述电源装置电性连接。
30.可选地,所述人机交互装置包括指示灯、急停按钮、蜂鸣器和示教器;其中:
31.所述指示灯包括多组三色led指示灯,用于显示所述ethercat总线型多轴驱控一体机的整机状态;
32.所述急停按钮,用于在所述ethercat总线型多轴驱控一体机出现紧急状态时触发安全保护;
33.所述蜂鸣器,用于指示所述ethercat总线型多轴驱控一体机的初始化和报警状
态;
34.所述示教器,用于进行拖动示教和可编程控制器的逻辑编程。
35.可选地,所述示教器包括触屏显示屏和按键,所述按键用于在所述触屏显示屏进行配置和编写代码。
36.可选地,所述ethercat总线型多轴驱控一体机还包括外围接口组件,所述外围接口组件与所述控制装置、所述驱动装置、所述电源装置和所述人机交互装置电性连接。
37.与现有技术相比较,本实用新型实施例提供的一种基于片上系统的ethercat总线型多轴驱控一体机,通过提供一种基于片上系统的ethercat总线型多轴驱控一体机,所述ethercat总线型多轴驱控一体机包括控制装置和驱动装置;其中:所述控制装置包括第一处理器、第二处理器和多轴ethercat总线从站控制器,所述第一处理器与所述第二处理器通过直接内存访问方式交互数据,所述第二处理器与所述多轴ethercat总线从站控制器通过串行外设接口交互数据;所述驱动装置包括若干电机驱动芯片,每个所述电机驱动芯片驱动一个电机;所述第二处理器控制若干所述电机驱动芯片,通过串行外设接口与若干所述电机驱动芯片交互数据;从而将控制装置和驱动装置合二为一,结构紧凑,集成化紧凑设计,做到驱动和控制一体化设计,可以充分利用控制装置的强大高频性能和丰富的外设资源接口,使控制装置和驱动装置可以做到有效资源分配,控制装置和驱动装置之间通过pcb板级串行外设接口进行通讯,省去控制装置和驱动装置的之间物理通讯插件和端子连线,简化外部线材连接,降低安装调试故障率,且将控制装置和驱动装置从结构上合二为一,共用一个散热铝型材,节约成本。从而避免驱动装置的结构尺寸空间大小受限,需要与散热铝型材在外部堆叠累加使用造成结构不紧凑而制约设备的集成化紧凑型设计,造成结构成本高,安装调试麻烦,故障率高的问题。并且采用多轴ethercat总线从站控制器,通过所述第二处理器控制驱动装置的多个电机驱动芯片,实现多个ethercat总线型运动控制轴共用一个多轴ethercat总线从站控制器,降低成本,且多轴的同步性基于硬件实现同步,同步性能好,从而避免出现从站驱动器只能驱动一台电机而无法支持一台从站驱动器的多轴控制的问题。
【附图说明】
38.图1是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机的结构示意图;
39.图2是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机中第一处理器与外部设备进行交互的示意图;
40.图3是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机中第二处理器与外部设备进行交互的示意图;
41.图4是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机作为多轴从站驱动器使用时升级固件s的示意图;
42.图5是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机作为主站运动控制器使用时处于冗余模式下的示意图;
43.图6是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机中驱动装置的结构示意图;
44.图7是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机的另一结构示意图;
45.图8是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机中电源装置进行电源转换的示意图;
46.图9是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机中人机交互装置的结构示意图;
47.图10是本实用新型提供的一种基于片上系统的ethercat总线型多轴驱控一体机中外围接口组件的结构示意图。
【具体实施方式】
48.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“电连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“内”、“外”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
49.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
50.此外,下面所描述的本实用新型不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
51.在一个实施例中,如图1所示,本实用新型提供一种基于片上系统(system on chip,soc)的ethercat总线型多轴驱控一体机,所述ethercat总线型多轴驱控一体机1包括:控制装置11和驱动装置12;其中:
52.所述控制装置11包括第一处理器111、第二处理器112和多轴ethercat总线从站控制器113;所述第一处理器111与所述第二处理器112通过直接内存访问(direct memory access,dma)方式交互数据,所述第二处理器112与所述多轴ethercat总线从站控制器113通过串行外设接口(serial peripheral interface,spi)交互数据;
53.所述驱动装置12包括若干电机驱动芯片121,每个所述电机驱动芯片121驱动一个电机;
54.所述第二处理器112控制若干所述电机驱动芯片121,通过串行外设接口与若干所述电机驱动芯片121交互数据。
55.在本实施例中,通过提供一种基于片上系统的ethercat总线型多轴驱控一体机,所述ethercat总线型多轴驱控一体机包括控制装置和驱动装置;其中:所述控制装置包括第一处理器、第二处理器和多轴ethercat总线从站控制器,所述第一处理器与所述第二处
理器通过直接内存访问方式交互数据,所述第二处理器与所述多轴ethercat总线从站控制器通过串行外设接口交互数据;所述驱动装置包括若干电机驱动芯片,每个所述电机驱动芯片驱动一个电机;所述第二处理器控制若干所述电机驱动芯片,通过串行外设接口与若干所述电机驱动芯片交互数据;从而将控制装置和驱动装置合二为一,结构紧凑,集成化紧凑设计,做到驱动和控制一体化设计,可以充分利用控制装置的强大高频性能和丰富的外设资源接口,使控制装置和驱动装置可以做到有效资源分配,控制装置和驱动装置之间通过pcb板级串行外设接口进行通讯,省去控制装置和驱动装置的之间物理通讯插件和端子连线,简化外部线材连接,降低安装调试故障率,且将控制装置和驱动装置从结构上合二为一,共用一个散热铝型材,节约成本。从而避免驱动装置的结构尺寸空间大小受限,需要与散热铝型材在外部堆叠累加使用造成结构不紧凑而制约设备的集成化紧凑型设计,造成结构成本高,安装调试麻烦,故障率高的问题。并且采用多轴ethercat总线从站控制器,通过所述第二处理器控制驱动装置的多个电机驱动芯片,实现多个ethercat总线型运动控制轴共用一个多轴ethercat总线从站控制器,降低成本,且多轴的同步性基于硬件实现同步,同步性能好,从而避免出现从站驱动器只能驱动一台电机而无法支持一台从站驱动器的多轴控制的问题。
56.在一个实施例中,所述控制装置11包括第一处理器111、第二处理器112和多轴ethercat总线从站控制器113,所述第一处理器111与所述第二处理器112通过直接内存访问方式交互数据,所述第二处理器112与所述多轴ethercat总线从站控制器113通过串行外设接口交互数据。
57.具体地,所述第一处理器111运行实时freertos系统,用于处理ethercat总线主站的协议栈数据交互、运动控制算法路径的规划和下载接收保存可编程控制器(programmable logic controller,plc)程序指令任务。
58.如图2所示,所述第一处理器111包括媒体介入控制层(media access control,mac)接口、可变静态存储控制器(flexible static memory controller,fsmc)接口、spi接口、控制器局域网络(controller area network,can)/通用异步收发传输器(universal asynchronous receiver/transmitter,urat)/spi接口和模数(analog to digital,ad)/数模(digital to analog,da)/输入输出(input output,io)接口。
59.所述第一处理器111通过spi接口和第三物理层芯片phy3与上位机交互数据,完成与上位机的通讯。其中,所述第三物理层芯片phy3内部集成tcp/ip的协议栈。
60.所述can/urat/spi接口可以实现连接外部的自定义通讯接口、基于can总线的canopen协议栈、基于485的modbus协议指令和自定义的高速spi接口。
61.所述第一处理器111可以通过所述can/urat/spi接口与外部的驱动芯片实现数据交互。
62.所述ad/da/io接口实现外围的高速电子探针,兼容npn和pnp型输入输出的io,模拟量电压型0-10v输入和输出,电流型0-40ma的信号采集和驱动。
63.所述第一处理器111通过所述ad/da/io接口与外部的运算放大器实现信号的采集和驱动。
64.所述第二处理器112用于完成多轴ethercat总线从站控制器113的协议栈数据交互和所述驱动装置12的若干电机驱动芯片121的控制,并实时采集与所述电机驱动芯片121
电性连接的电机的运行状态和参数。
65.具体地,如图3所示,所述第二处理器112包括flash存储器、rtc(real time clock,实时时钟)、温度传感器、iic(inter-integrated circuit,集成电路总线)接口、usb(universal serial bus,通用串行总线)接口、串行外设接口和io接口;其中:
66.所述flash存储器,用于存储固化数据,保存电机驱动芯片驱动电机的外围配置信息。
67.所述rtc,用于实时计时。
68.所述温度传感器,用于检测所述控制装置11所在板卡的温度。
69.所述iic接口,与外部的eeprom存储器电性连接;所述第二处理器112通过所述iic接口访问eeprom存储器,在擦除flash存储器的情况下依然可以保存驱控电机驱动芯片的配置信息。
70.所述usb接口,与外部的usb设备电性连接;所述第二处理器112通过所述usb接口升级固件,并且可以调用上位机的usb界面调试电机,观测电机的动态响应图表。
71.所述串行外设接口,与所述多轴ethercat总线从站控制器113电性连接;所述第二处理器112通过所述串行外设接口与所述多轴ethercat总线从站控制器113交互数据。
72.所述第二处理器112通过所述串行外设接口和所述io接口与所述驱动装置12进行数据交互。
73.在本实施例中,在将控制装置11和驱动装置12合二为一,做到驱动和控制一体化设计,可以充分利用控制装置11的强大高频性能和丰富的外设资源接口,使控制装置11和驱动装置12可以做到有效资源分配;并且,所述控制装置11还设置用于升级固件的usb接口,通过所述usb接口,可以为通过ethercat总线的foe协议连接的所述第二处理器112和所述驱动装置12的多个电机驱动芯片提供固件升级,从而通过ethercat总线的foe协议实现驱动装置12的多轴电机驱动芯片121的固件代码同步升级,提升烧录速度和操作便利性,固件升级效率高。从而避免现有的多轴电机驱动芯片升级固件时,需要单个电机驱动芯片逐个连接烧录工作进行烧录造成多轴电机驱动芯片固件升级麻烦,且客户现场没有烧录工作时就无法完成固件升级更新的问题。
74.在一个实施例中,所述控制装置11包括多轴ethercat总线从站控制器113,所述多轴ethercat总线从站控制器113与所述第二处理器112通过串行外设接口交互数据,所述第二处理器112控制若干所述电机驱动芯片121,通过串行外设接口与若干所述电机驱动芯片121交互数据。
75.所述多轴ethercat总线从站控制器113可以实现通过所述第二处理器112控制多个所述电机驱动芯片121,实现一拖二/一拖三/一拖四/一拖六,多个电机驱动芯片121共同一个所述多轴ethercat总线从站控制器113,降低生产成本;且多轴的同步性基于所述多轴ethercat总线从站控制器113的硬件实现同步,同步性能好;插补控制与电机的foc矢量控制算法可以在所述ethercat总线型多轴驱控一体机1的所述多轴ethercat总线从站控制器113上面实现。
76.foc(field-oriented control)为磁场导向控制,又称为矢量控制(vector control),磁场导向控制算法又称为foc矢量控制算法,是一种利用变频器控制三相电机的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制电机的输出。
77.如图4所示,所述ethercat总线型多轴驱控一体机1在作为多轴从站驱动器使用时,当客户现场控制器需要升级固件时,所述ethercat总线型多轴驱控一体机1的从站ethercat_in网口连接客户主站上位机系统,在boot模式下,导入控制器固件,通过ethercat总线的foe通讯协议将固件传输到从站,将固件复制到待拷贝区域,然后触发bootloader引导程序,将固件复制到应用区域,完成固件升级。
78.烧录从站的xml设备描述文件时,切换ethercat总线状态机在init状态,烧录xml文件,待保存到从站的eeprom里面后,重启从站,完成描述文件的升级。
79.所述ethercat总线型多轴驱控一体机1在作为多轴从站驱动器使用时,客户主站上位机系统扫描从站时,根据xml设备描述文件模块里面设定的sdo和pdo配置规则,对象字典的地址自增加,多个轴驱动信息在一个从站控制器里面完成同步交互,通过对象字典独立控制和读取状态,多个轴共用一个ethercat通讯状态机,但是402轴的状态机是独立的。
80.所述ethercat总线型多轴驱控一体机1的ethercat总线cia402协议栈驱动多轴设计如下:
81.rxpdo(0x1c12)对象字典映射分配:
82.子索引1对应轴1 0x1601
83.子索引2对应轴2 0x1611
84.子索引3对应轴3 0x1621
85.子索引4对应轴4 0x1631
86....
87.pdo对象字典分配(增加一个轴对象字典地址增加0x800):
88.6000h to 67ffh对应轴1
89.6800h to 6fffh对应轴2
90.7000h to 77ffh对应轴3
91.7800h to 7fffh对应轴4
92....
93.txpdo(0x1c13)对象字典映射分配:
94.子索引1对应轴1 0x1a01
95.子索引2对应轴2 0x1a11
96.子索引3对应轴3 0x1a21
97.子索引4对应轴4 0x1a31
98....
99.sdo对象字典分配(增加一个轴对象字典地址增加0x800):
100.6000h to 67ffh对应轴1
101.6800h to 6fffh对应轴2
102.7000h to 77ffh对应轴3
103.7800h to 7fffh对应轴4
104....
105.cia402运行模式对应对象字典分配:(增加一个轴对象字典地址增加0x10)
106.pp/csp模式:0x1601 0x6040控制字0x607a目标位置
107.0x1a01 0x6041状态字0x6064实际位置
108.csv模式:0x1602 0x6040控制字0x60ff目标速度
109.0x1a02 0x6041状态字0x606c实际速度
110.cst模式:0x1603 0x6040控制字0x6071目标力矩
111.0x1a03 0x6041状态字0x6077实际力矩0x6064实际位置
112.homing模式:0x6898回零模式0x6899回零速度0x689a回零加速度
113.sdo名称合对应对象字典分配(增加一个轴对象字典地址增加0x800):
114.电机命令字:0x2001
115.电机控制字:0x3001
116.电机状态字:0x4001
117.电机报警字:0x5001
118.数字输入:0x60fd
119.数字输出:0x60fe
120.错误代码:0x603f
121.运行模式:0x6060
122.模式显示:0x6061
123.位置窗口:0x6067
124.位置窗口时间:0x6068
125.软件限位:0x607d
126.最大速度:0x607f
127.最大加速度:0x6083
128.最大减速度:0x6084
129.急停减速度:0x6085
130.位置因数:0x6093
131.速度因数:0x6094
132.在本实施例中,所述ethercat总线型多轴驱控一体机1在作为多轴从站驱动器使用时,所述ethercat总线型多轴驱控一体机1具备固件升级功能,通过ethercat总线的foe协议实现多轴的驱动器固件代码同步升级,提升烧录速度和操作便利性。
133.在一个实施例中,如图2所示,所述控制装置11还包括ethercat主网卡114和ethercat副网卡115。
134.所述ethercat主网卡114通过第一物理层芯片(physical layer,phy)phy1连接所述第一处理器111的mac接口,驱动连接所述第一处理器111的mac外设。
135.所述ethercat副网卡115通过第二物理层芯片phy2连接所述第一处理器111的fsmc接口和中断信号接口。
136.如图5所示,所述ethercat总线型多轴驱控一体机1在作为主站运动控制器使用时,所述ethercat主网卡和所述ethercat副网卡可以工作在冗余模式。在冗余模式下,所述ethercat主网卡使用网线依次连接从站,最后一个从站使用网线连接所述ethercat副网卡。上电时,首先所述ethercat主/所述ethercat副网卡完成初始化工作,扫描从站设备,记录从站设备的信息保存在所述第一处理器111内。默认选取所述ethercat主网口通讯,所述
ethercat副网卡与所述ethercat主网卡数据共享。所述第一处理器111做动态监测,其中有任意一个网口通讯异常时,自动切换为冗余通道工作。从站设备如果有掉线、断电或通讯异常,ethercat总线触发回环机制,数据帧安全返回,由所述ethercat副网卡发出数据帧,保证各个从站的数据报文完整。
137.在本实施例中,通过所述ethercat主网卡114和ethercat副网卡115组成冗余通道,可以使所述ethercat总线型多轴驱控一体机1可以工作在冗余模式,即使出现有一个网口失效或者从站故障,也不会导致其他设备工作异常。从而可以解决目前ethercat总线只能处于单网口的通讯方式,不支持多网口冗余的通讯方式,一旦有一个网口失效或者从站故障导致其他设备工作异常的问题。
138.在一个实施例中,如图6所示,所述驱动装置12包括若干电机驱动芯片121,每个所述电机驱动芯片121驱动一个电机,其中,所述电机包括永磁同步电机、步进电机、直流无刷电机或直流电机。
139.具体地,所述电机驱动芯片121与所述控制装置11之间通过所述串行外设接口和所述io接口进行数据交互;具体地,所述电机驱动芯片121与所述控制装置11的第二处理器112之间通过所述串行外设接口spi和所述io接口进行数据交互。
140.具体地,所述电机驱动芯片121通过io接口将配置给与其电性连接的电机的驱动电机的外围配置信息,以及给电机提供驱动侧电源和使能信息传输给所述第二处理器112。也即所述第二处理器112通过io接口来读取所述电机驱动芯片121配置给与其电性连接的电机的驱动电机的外围配置信息,以及给电机提供驱动侧电源和使能。
141.所述电机驱动芯片121通过串行外设接口spi将其内部寄存器设置电机的运行参数、电机的运行状态、报警信息和位置信息,以及通过编码器的反馈位置信息计算出电机运行的实际速度加速度传输给所述第二处理器112。也即所述第二处理器112通过串行外设接口spi读写所述电机驱动芯片121内部寄存器设置电机的运行参数、电机的运行状态、报警信息和位置信息,以及通过编码器的反馈位置信息计算出电机运行的实际速度加速度。
142.如图6所示,所述电机驱动芯片121内部硬件集成脉宽调制器(pulse width modulation,pwm)、模数转换器(analog to digital converter,adc)和编码器(encoder);所述电机驱动芯片121内部集成foc矢量控制算法和pid算法,采用pid算法输出svpwm(space vector pulse width modulation,空间矢量脉宽调制),采集驱动的相电流和电机的光栅编码器反馈的abz信号,进行电流环、速度环和位置环的计算,驱动电机运行在位置、速度、力矩、回零模式。
143.pid即proportional(比例)、integral(积分)、differential(微分)的缩写,pid控制算法是结合比例、积分和微分三种环节于一体的控制算法,是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出。
144.所述脉宽调制器,用于根据所述第二处理器112通过io接口输出的信号控制所述驱动装置12的每个电机驱动芯片121驱动与其电性连接的电机轴的驱动电源和电机轴的使能抱闸信号。
145.所述模数转换器,用于采集驱动的相电流,具体是采集各个电机驱动电路的母线电压、电流做动态监测。
146.所述编码器,用于采集电机的光栅编码器反馈的abz信号,进行电流环、速度环和
位置环的计算,驱动电机运行在位置、速度、力矩、回零模式。
147.在一个实施例中,如图7所示,所述ethercat总线型多轴驱控一体机还包括电源装置13,所述电源装置13分别与所述控制装置11和所述驱动装置12电性连接,用于将交流电源转换成直流电源,输出给所述控制装置11和所述驱动装置12,为所述控制装置11和所述驱动装置12供电。
148.具体地,所述电源装置13用于保障驱动一体机的电源供给,支持380v和220v电压的交流电源供电。
149.如图8所示,所述电源装置13通过接触器空开开关,连接到emc滤波器,通过延迟启动降压滤波电路输出48v/24v的直流电源(dc48v/24v)。
150.所述电源装置13通过接触器空开开关,连接到emc滤波器,通过隔离稳定电路输出直流电源给所述驱动装置,以使所述驱动装置给电机供电。
151.所述电源装置13通过隔离降压滤波电路将交流电源转换为直流电源,提供给所述控制装置和所述驱动装置,所述直流电源包括dc24v/12v5v/3.3v/1.2v。
152.所述电源装置13与所述控制装置11电性连接,以使所述控制装置11采集所述电源装置13的电压运行电流,以使所述控制装置13做漏电检测和过压过流检测。
153.在一个实施例中,如图7所示,所述ethercat总线型多轴驱控一体机1还包括人机交互装置14,所述人机交互装置14与所述控制装置11和所述电源装置13电性连接。所述电源装置13还为所述人机交到装置14供电。
154.具体地,如图9所示,所述人机交互装置14包括指示灯、急停按钮、蜂鸣器和示教器;其中:
155.所述指示灯包括多组三色led指示灯,用于显示所述ethercat总线型多轴驱控一体机1的整机状态,根据指示灯的闪烁频率和亮灯颜色,对应状态码和故障码。
156.所述急停按钮,用于在所述ethercat总线型多轴驱控一体机1出现紧急状态时触发安全保护。
157.所述蜂鸣器,用于指示所述ethercat总线型多轴驱控一体机1的初始化和报警状态。
158.所述示教器,用于进行拖动示教和plc的逻辑编程;所述示教器包括触屏显示屏和按键,所述按键用于在所述触屏显示屏进行配置和编写代码。
159.在一个实施例中,如图7所示,所述ethercat总线型多轴驱控一体机1还包括外围接口组件15,所述外围接口组件15与所述控制装置11、所述驱动装置12、所述电源装置13和所述人机交互装置14电性连接。
160.具体地,如图10所示,所述外围接口组件15包括ac电源输入端子、电源总开关、支持多组模拟量采集和模拟量输出的模拟量接口、支持npn和pnp型输出和输入的外部io接口、外部多轴电机的增量式abz编码器接口、满足用户的非标需求为预留用户的can/485/spi接口、连接所述ethercat总线型多轴驱控一体机的plc上位机的ide编程界面的网络通讯接口、满足伺服和步进电机的需求的多组电机动力线接口、插拔线材的示教器接口。
161.在本实施例中,通过提供外围接口组件,可以所述ethercat总线型多轴驱控一体机1支持特殊的非标应用需求,使得其他的传感器和网关数据可以通过对应的接口接入到所述ethercat总线型多轴驱控一体机1,使得接入成本低,开发难度小。从而可以避免出现
系统由于只预留有ethercat总线和其他工业现场总线接口,造成系统不支持特殊的非标应用需求,使得其他的传感器和网关数据只能通过单独的总线设备形式接入到系统,接入成本高,开发难度大。
162.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
163.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1