一种自动化组网集群式多旋翼无人机的制作方法
本技术涉及多旋翼无人机相关,尤其涉及一种自动化组网集群式多旋翼无人机。
背景技术:
1、多旋翼无人机是指三个或者三个以上旋翼的直升机,称为多旋翼无人机也可称多轴无人机,其中旋翼是指提供动力的螺旋桨,轴是指供动力的旋翼的旋转轴,旋翼的总距固定,而不像一般直升机那样可变,通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹故此,且多旋翼的操控简单,不需要跑道便可以垂直起降,起飞后可在空中悬停,使用的元件容易替换,特别需要一种自动化组网集群式多旋翼无人机。
2、但是现有的多旋翼无人机,在使用该装置时,由于通过手柄进行人工操作单个控制,只能简单的按照规定路线进行规范巡逻,只能实现点对点的单个无人机控制,工作效率低,工作效果差,无法一起调节多个多旋翼无人机,使多个多旋翼无人机进行配合工作,使其形成集群式多旋翼无人机的效果。
技术实现思路
1、本实用新型的目的在于提供一种自动化组网集群式多旋翼无人机,以解决上述背景技术中提出在使用该装置时,由于由于通过手柄进行人工操作单个控制,只能简单的按照规定路线进行规范巡逻,只能实现点对点的单个无人机控制,工作效率低,工作效果差,无法一起调节多个多旋翼无人机,使多个多旋翼无人机进行配合工作,使其形成集群式多旋翼无人机的效果的问题。
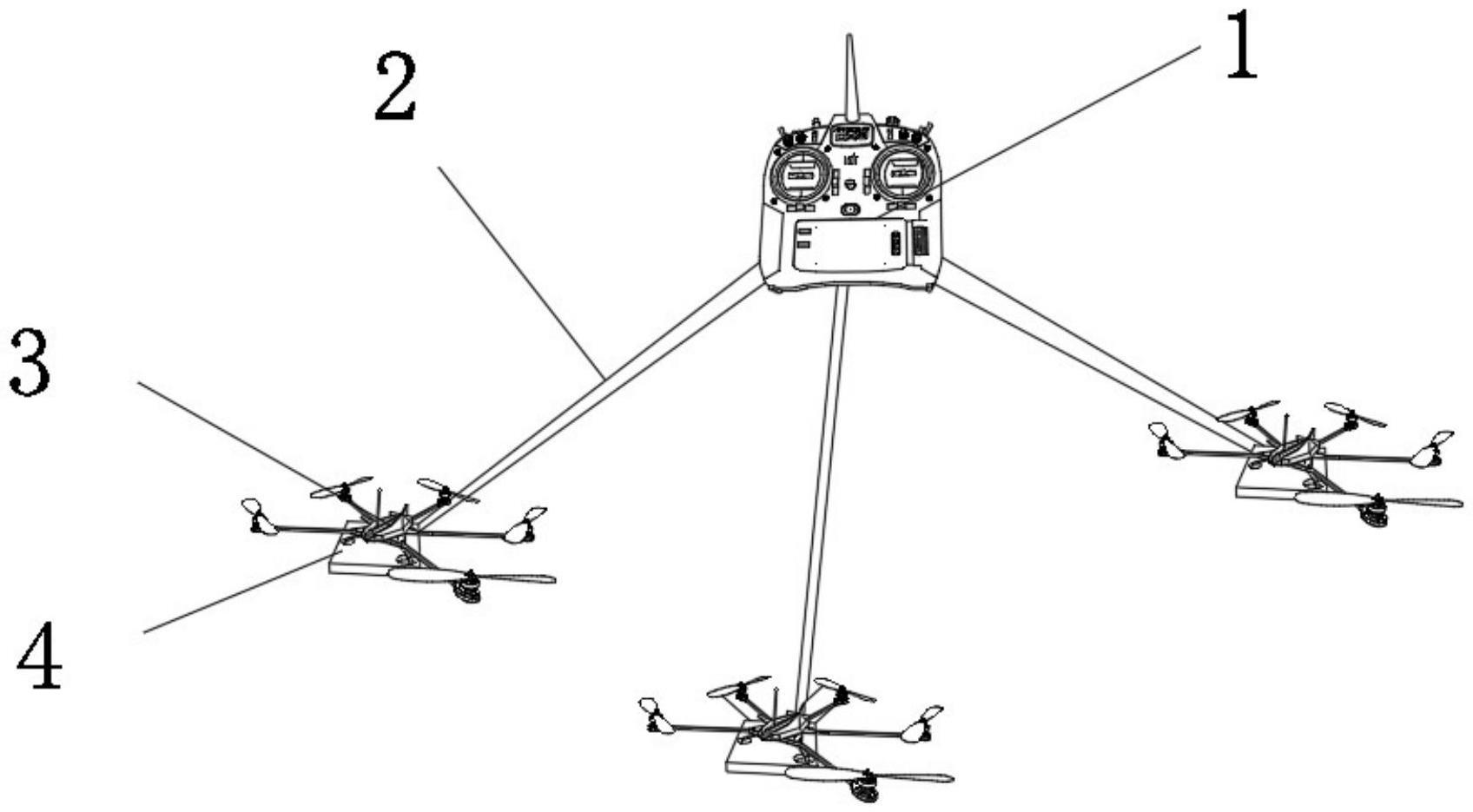
2、为实现上述目的,本实用新型提供如下技术方案:一种自动化组网集群式多旋翼无人机,包括自组网中继基站和多旋翼无人机智能巡航机构,多旋翼无人机智能巡航机构包括多旋翼无人机外壳、无线收发装置、数据收集器、雷达监测设备、温度传感器、风速传感器和摄像头,所述自组网中继基站的前端连接有连接线,所述连接线的一端连接有自组网通讯模块,所述自组网通讯模块的顶端设置有连接块,所述连接块的顶端设置有多旋翼无人机智能巡航机构。
3、优选的,所述自组网通讯模块包括可编辑控制器、蓄电池、太阳能充电板、固定凹槽和无人机连接扣,所述连接线的一端连接有可编辑控制器,所述可编辑控制器的底端设置有蓄电池,所述蓄电池的侧面电线连接有太阳能充电板,所述可编辑控制器的顶端设置有固定凹槽,所述固定凹槽的外侧设置有无人机连接扣。
4、优选的,所述蓄电池与太阳能充电板之间为电性连接,所述蓄电池与太阳能充电板紧密贴合。
5、优选的,所述可编辑控制器与自组网中继基站之间为电性连接,所述可编辑控制器在自组网中继基站的侧面设置有3组。
6、优选的,所述多旋翼无人机智能巡航机构包括多旋翼无人机外壳、无线收发装置、数据收集器、雷达监测设备、温度传感器、风速传感器和摄像头,所述连接块的顶端设置有多旋翼无人机智能巡航机构,所述多旋翼无人机智能巡航机构的内部设置有无线收发装置,所述无线收发装置的顶端电性连接有数据收集器,所述数据收集器的一端连接有雷达监测设备,所述数据收集器的左侧连接有温度传感器,所述数据收集器的右侧连接有风速传感器,所述数据收集器的前端连接有风速传感器。
7、优选的,所述数据收集器与无线收发装置为电性连接,所述数据收集器与无线收发装置尺寸相匹配。
8、优选的,所述温度传感器与自组网中继基站为螺钉连接,所述温度传感器与自组网中继基站紧密贴合。
9、与现有技术相比,本实用新型的有益效果是:该多旋翼无人机智能巡航机构,通过多旋翼无人机外壳、无线收发装置、数据收集器、雷达监测设备、温度传感器、风速传感器和摄像头的设置,自组网中继基站接受到操作台的命令时,自组网中继基站通过自组网通讯模块控制多个多旋翼无人机进行数据采集,每一个多旋翼无人机智能巡航机构,通过温度传感器和风速传感器,对需要检测对象的环境进行数据采集,再通过雷达监测设备和摄像头,对地形和地貌进行采集,最后通过数据收集器将数据收集,并通过无线收发装置将数据传输至控制台,由于多旋翼无人机智能巡航机构设置有3组,因此操作简单,工作效率高。
技术特征:
1.一种自动化组网集群式多旋翼无人机,包括自组网中继基站(1)和多旋翼无人机智能巡航机构(5),多旋翼无人机智能巡航机构(5)包括多旋翼无人机外壳(501)、无线收发装置(502)、数据收集器(503)、雷达监测设备(504)、温度传感器(505)、风速传感器(506)和摄像头(507),其特征在于:所述自组网中继基站(1)的前端连接有连接线(2),所述连接线(2)的一端连接有自组网通讯模块(3),所述自组网通讯模块(3)的顶端设置有连接块(4),所述连接块(4)的顶端设置有多旋翼无人机智能巡航机构(5)。
2.根据权利要求1所述的一种自动化组网集群式多旋翼无人机,其特征在于,所述自组网通讯模块(3)包括可编辑控制器(301)、蓄电池(302)、太阳能充电板(303)、固定凹槽(304)和无人机连接扣(305),所述连接线(2)的一端连接有可编辑控制器(301),所述可编辑控制器(301)的底端设置有蓄电池(302),所述蓄电池(302)的侧面电线连接有太阳能充电板(303),所述可编辑控制器(301)的顶端设置有固定凹槽(304),所述固定凹槽(304)的外侧设置有无人机连接扣(305)。
3.根据权利要求2所述的一种自动化组网集群式多旋翼无人机,其特征在于,所述蓄电池(302)与太阳能充电板(303)紧密贴合。
4.根据权利要求2所述的一种自动化组网集群式多旋翼无人机,其特征在于,所述可编辑控制器(301)与自组网中继基站(1)之间为电性连接,所述可编辑控制器(301)在自组网中继基站(1)的侧面设置有3组。
5.根据权利要求1所述的一种自动化组网集群式多旋翼无人机,其特征在于,所述多旋翼无人机智能巡航机构(501)的内部设置有无线收发装置(502),所述无线收发装置(502)的顶端电性连接有数据收集器(503),所述数据收集器(503)的一端连接有雷达监测设备(504),所述数据收集器(503)的左侧连接有温度传感器(505),所述数据收集器(503)的右侧连接有风速传感器(506),所述数据收集器(503)的前端连接有风速传感器(507)。
6.根据权利要求5所述的一种自动化组网集群式多旋翼无人机,其特征在于,所述数据收集器(503)与无线收发装置(502)为电性连接,所述数据收集器(503)与无线收发装置(502)尺寸相匹配。
7.根据权利要求5所述的一种自动化组网集群式多旋翼无人机,其特征在于,所述温度传感器(505)与自组网中继基站(1)为螺钉连接,所述温度传感器(505)与自组网中继基站(1)紧密贴合。
技术总结
本技术提供一种自动化组网集群式多旋翼无人机,所述自组网中继基站的前端连接有连接线,所述连接线的一端连接有自组网通讯模块,所述连接块的顶端设置有多旋翼无人机智能巡航机构。该多旋翼无人机智能巡航机构,自组网中继基站接受到操作台的命令时,自组网中继基站通过自组网通讯模块控制多个多旋翼无人机进行数据采集,每一个多旋翼无人机智能巡航机构,通过温度传感器和风速传感器,对需要检测对象的环境进行数据采集,再通过雷达监测设备和摄像头,对地形和地貌进行采集,最后通过数据收集器将数据收集,并通过无线收发装置将数据传输至控制台,由于多旋翼无人机智能巡航机构设置有3组,因此操作简单,工作效率高。
技术研发人员:李巧巧,李子玉,陶乐进,毛安南
受保护的技术使用者:雷震子(苏州)科技有限公司
技术研发日:20221104
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!