动态环境中导航的定向探索的制作方法
本公开总体上涉及移动机器人的导航。
背景技术:
1、机器人是一种可重新编程的且多功能的操纵器,被设计用于通过可变编程运动(motions)移动材料、零件、工具或专用设备,为了任务的执行。机器人可以是被物理上锚定的操纵器(例如,工业机械臂)、在环境中移动的移动机器人(例如,腿、轮子或基于牵引的机构)、或者操纵器和移动机器人的某种组合。机器人被利用于各种行业,包括例如制造、运输、危险环境、勘探和医疗保健。因此,机器人穿越有障碍的环境的能力为这些行业提供了附加的好处。
技术实现思路
1、本公开的一个方面提供了一种计算机实施的方法,当由数据处理硬件执行时,使得数据处理硬件执行操作。所述操作包括接收包括路点集合的导航路线,所述路点集合包括第一路点和第二路点,基于由移动机器人捕获的传感器数据生成局部障碍地图,确定移动机器人由于障碍阻碍路径而不能沿着第一路点和第二路点之间的路径执行移动指令,基于局部障碍地图识别第三路点,以及生成替代路径以将移动机器人导航到第三路点以避开障碍。
2、本公开的另一方面提供了一种移动机器人,包括运动结构和导航系统,所述导航系统被配置为控制运动结构以协调移动机器人的移动。所述导航系统包括数据处理硬件和与数据处理硬件通信的存储器硬件。存储器硬件存储指令,当在数据处理硬件上执行指令时,使得数据处理硬件执行操作。所述操作包括接收包括路点集合的导航路线,所述路点集合包括第一路点和第二路点,基于由移动机器人捕获的传感器数据生成局部障碍地图,确定移动机器人由于障碍阻碍路径而不能沿着第一路点和第二路点之间的路径执行移动指令,基于局部障碍地图识别第三路点,生成替代路径以将移动机器人导航到第三路点以避开障碍。
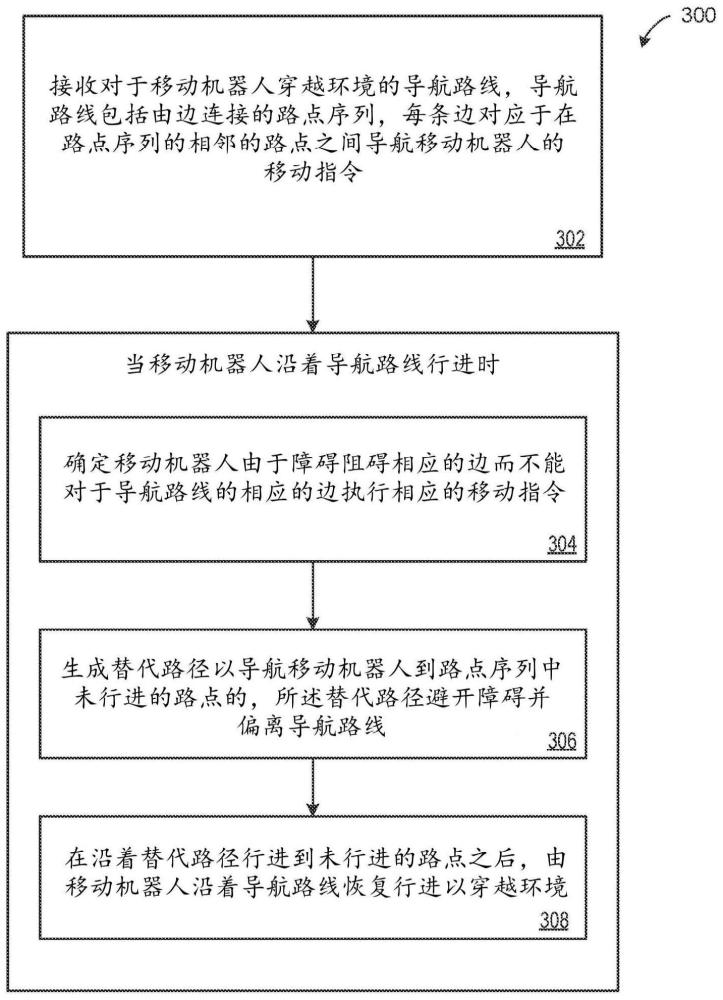
3、本公开的另一方面提供了一种计算机实施的方法,当由数据处理硬件执行时,使得数据处理硬件执行操作。所述操作包括接收对于移动机器人的导航路线,所述导航路线包括由边连接的路点序列。每条边对应于在路点序列的路点之间导航移动机器人的移动指令。当移动机器人沿着导航路线行进时,所述操作包括确定移动机器人由于障碍阻碍相应的边而不能对于导航路线的相应的边执行相应的移动指令,生成替代路径以将移动机器人导航到路点序列中未行进的路点,以及由移动机器人沿着导航路线恢复行进。替代路径避开了障碍。
4、在一些实施方式中,生成到路点序列中未行进的路点的替代路径包括确定未行进的路点存在于从由移动机器人的传感器系统捕获的当前传感器数据生成的局部障碍地图内。当前传感器数据表示移动机器人周围的区域。在进一步的实施方式中,局部障碍地图包括占用栅格,其指定是否占用栅格中的每个单元包括对于移动机器人的相应的障碍。在其他进一步的实施方式中,确定未行进的路点存在于局部障碍地图内包括,对于路点序列中的每个未行进的路点,识别是否相应的未行进的路点存在于局部障碍地图内。当相应的未行进的路点存在于局部障碍地图内时,生成替代路径包括生成从移动机器人的当前位置到相应的未行进的路点的替代路径。在更进一步的实施方式中,当相应的未行进的路点不存在于局部障碍地图内时,操作还包括将移动机器人移向相应的未行进的路点的位置,同时避开障碍,直到相应的未行进的路点存在于局部障碍地图内。
5、在一些实施例中,由移动机器人沿着导航路线恢复行进包括执行从未行进的路点开始连接导航路线的路点序列的未行进的部分的边的移动指令。在一些示例中,导航路线是从将环境表示为由相应的边互连的多个路点的拓扑地图中导出的。在进一步的示例中,拓扑地图对应于环境的高级地图,该高级地图被抽象以移除未能对应于路点和边的度量细节。在其他进一步的示例中,确定移动机器人不能执行相应的边的相应的移动指令包括确定拓扑地图未能提供避开阻碍相应的边的障碍的避开路径。
6、在一些实施方式中,所述操作还包括通过使用最初的映射过程对于环境建立拓扑地图,所述最初的映射过程导航移动机器人通过环境,生成对应于环境的特征的多个路点,并使用拓扑地图生成导航路线。在一些实施例中,替代路径形成导航路线中之前未连接的两个路点之间的相应的路径。
7、在一些示例中,路点序列中的每个路点之前在环境的最初的映射期间被记录,并且阻碍相应的边的障碍之前在环境的最初的映射期间未被发现。在一些实施方式中,避开障碍的替代路径偏离导航路线。
8、本公开的另一方面提供了一种移动机器人。所述移动机器人包括主体、耦合到主体的两条或多条腿、以及被配置为协调两条或多条腿的移动的导航系统。所述导航系统包括数据处理硬件和与数据处理硬件通信的存储器硬件。存储器硬件存储指令,当在数据处理硬件上执行所述指令时,使得数据处理硬件执行操作。所述操作包括接收对于移动机器人的导航路线。所述导航路线包括由边连接的路点序列。每条边对应于在路点序列的路点之间导航移动机器人的移动指令。当移动机器人沿着导航路线行进时,所述操作包括确定移动机器人由于障碍阻碍相应的边而不能对于导航路线的相应的边执行相应的移动指令,生成替代路径以将移动机器人导航到路点序列中未行进的路点,以及由移动机器人沿着导航路线恢复行进。替代路径避开了障碍。
9、在一些实施方式中,生成到路点序列中未行进的路点的替代路径包括确定未行进的路点存在于从由移动机器人的传感器系统捕获的当前传感器数据生成的局部障碍地图内。当前传感器数据表示移动机器人周围的区域。在进一步的实施方式中,局部障碍地图包括占用栅格,其指定是否占用栅格中的每个单元包括对于移动机器人的相应的障碍。在其他进一步的实施方式中,确定未行进的路点存在于局部障碍地图内包括,对于路点序列中的每个未行进的路点,识别是否相应的未行进的路点存在于局部障碍地图内。当相应的未行进的路点存在于局部障碍地图内时,生成替代路径包括生成从移动机器人的当前位置到相应的未行进的路点的替代路径。在更进一步的实施方式中,当相应的未行进的路点不存在于局部障碍地图内时,操作还包括将移动机器人移向相应的未行进的路点的位置,同时避开障碍,直到相应的未行进的路点存在于局部障碍地图内。
10、在一些实施例中,由移动机器人沿着导航路线恢复行进包括执行从未行进的路点开始连接导航路线的路点序列的未行进的部分的边的移动指令。在一些示例中,导航路线是从将环境表示为由相应的边互连的多个路点的拓扑地图中导出的。在进一步的示例中,拓扑地图对应于环境的高级地图,该高级地图被抽象以移除未能对应于路点和边的度量细节。在其他进一步的示例中,确定移动机器人不能执行相应的边的相应的移动指令包括确定拓扑地图未能提供避开阻碍相应的边的障碍的避开路径。
11、在一些实施方式中,所述操作还包括通过使用最初的映射过程对于环境建立拓扑地图,所述最初的映射过程导航移动机器人通过环境,生成对应于环境的特征的多个路点,并使用拓扑地图生成导航路线。在一些实施例中,替代路径形成导航路线中之前未连接的两个路点之间的相应的路径。
12、在一些示例中,路点序列中的每个路点之前在环境的最初的映射期间被记录,并且阻碍相应的边的障碍之前在环境的最初的映射期间未被发现。在一些实施方式中,避开障碍的替代路径偏离导航路线。
13、本公开的一个或多个实施方式的细节在以下附图和说明中阐述。根据说明书和附图并且根据权利要求书,其他方面、特征和优点将变得显而易见。
- 还没有人留言评论。精彩留言会获得点赞!