一种用于电子导向胶轮车的自动驾驶系统的制作方法
本发明涉及自动驾驶,特别涉及一种用于电子导向胶轮车的自动驾驶系统。
背景技术:
1、近年来,自动驾驶技术依托电子信息技术的飞速发展。在轨道交通领域,列车自动驾驶系统(automatic train operation,简称ato)是轨道车辆自动驾驶领域的关键技术,它能够实现精确停车、自动行驶、列车自动运行调整与无人折返等功能,能够降低列车的运营成本并提高列车的效率。轨道车辆由于有物理钢轨道的约束,故列车控制系统无需对车辆横向姿态进行主动控制。而电子导向胶轮系统作为一种新型的交通制式,就是利用虚拟轨道导向代替钢轮钢轨导向,故传统的自动驾驶技术已经不再完全适用于电子导向胶轮系统,并且现有专利中并没有针对电子导向胶轮系统的自动驾驶架构设计,本发明针对这一问题,设计了一种用于电子导向胶轮系统的自动驾驶系统。
技术实现思路
1、本发明提供一种用于电子导向胶轮车的自动驾驶系统,可以解决背景技术中所指出的问题。
2、一种用于电子导向胶轮车的自动驾驶系统,包括:
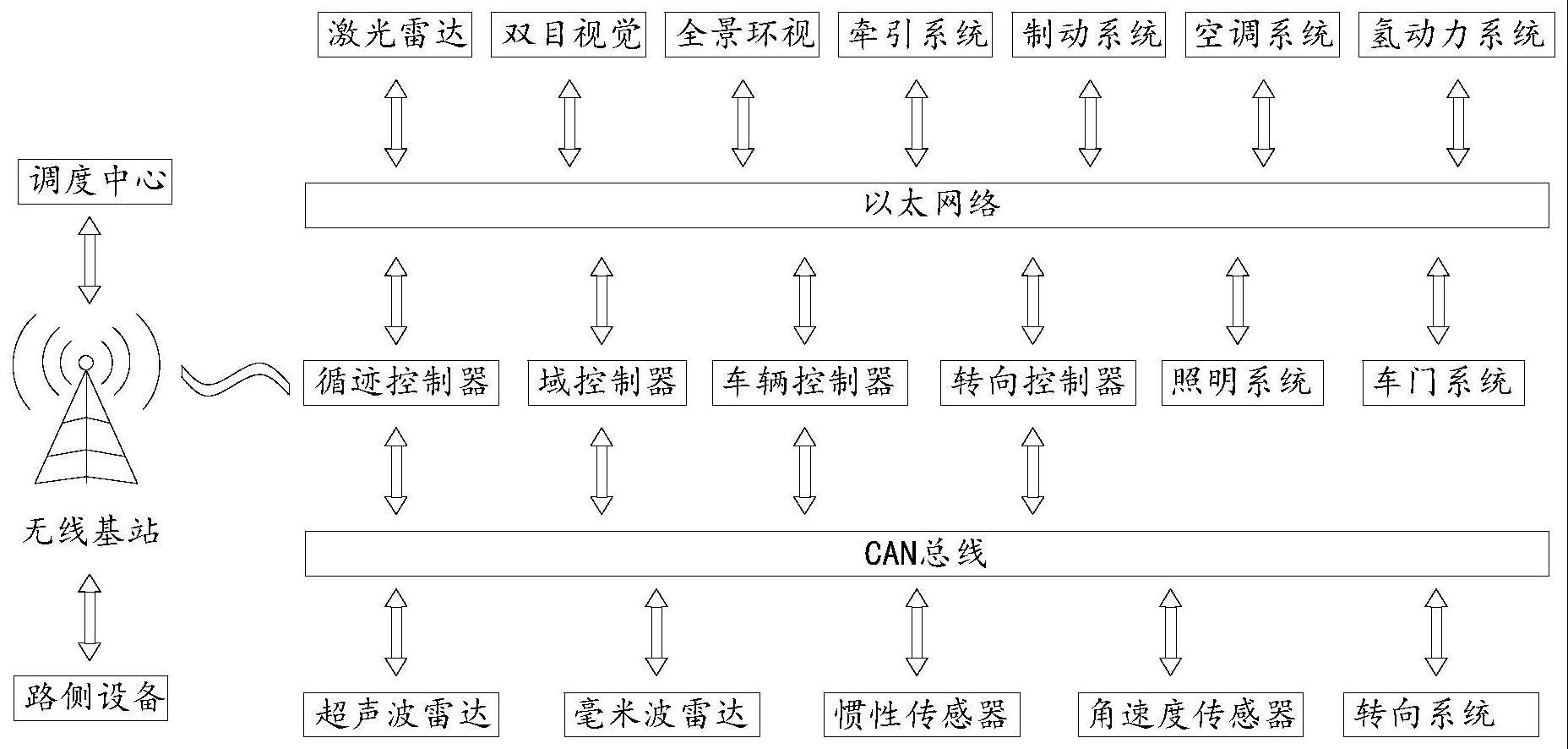
3、感知模块,包括路侧设备和车侧设备,路侧设备用于获取道路信息,车侧设备用于获取车身周边环境信息以及车辆在轨条件,并对周围障碍物进行检测,感知模块将获取到的各类信息输出至决策模块;
4、决策模块,接收感知模块提供的各类信息并进行融合处理,并基于车辆在轨条件输出决策信息至控制模块;
5、控制模块,接收决策模块提供的决策信息并以决策信息中的速度指令为控制目标值,通过转向控制器进行车辆纵向控制;
6、所述路侧设备用于检测并跟踪交通参与者,并根据车辆速度、车辆位置判断是否会相撞,并给出建议车速以及碰撞预警,提供交通参与者数量、位置、速度、置信度信息与局部建议车速、置信度信息;
7、所述车侧设备至少包括激光雷达、双目视觉传感器、超声波雷达、惯导传感器以及毫米波雷达中的一个;
8、所述激光雷达用于实时反馈雷达点云数据,通过深度学习算法,识别车辆、行人及路障,获取障碍物相对于车辆的位置、车速、碰撞时间与置信度信息;
9、双目视觉传感器用于识别车道线以及障碍物的类别,通过检测标线辅助车辆进行循迹控制,获取障碍物相对于车辆的位置、车速、碰撞时间与置信度信息;
10、超声波雷达以及毫米波雷达用于获取车身周边障碍物距离信息,对危险距离障碍物提供预警信息;
11、惯导传感器用于获取偏航角数据、横摆角速度数据以及加速度数据;
12、所述决策模块还包括循迹控制器、域控制器、车辆控制器以及转向控制器;
13、循迹控制器用于提供数字轨道地图以及车辆横纵向精准定位,并且通过磁传感器检测横向偏差,计算第一轴循迹控制转向指令,同时依据曲率信息,提供最高限速、道路状况建议车速、置信度信息;
14、域控制器根据汽车电子部件功能将整车划分为动力总成域,智能座舱域和自动驾驶域,并利用多核cpu/gpu芯片控制每个域;
15、车辆控制器通过采集驾驶员操控信息,车辆行使信息、发动机、电机、电池、变速箱数据及各个子系统的反馈信息,经过计算向各个子系统发送控制命令,从而实现车辆控制器对整车的控制;
16、转向控制器是控制电机动作的模块,用于汽车的各种外围电路与接口电路的连接控制;
17、决策模块还包括车辆计算平台以及信号计算平台;
18、信号计算平台与感知模块、调度系统通讯连接,获取感知模块获取的各类信息以及车辆调度信息,并采集磁钉、接收4g数据以实现车辆定位、授时、调度通讯功能;
19、车辆计算平台用于处理感知模块获取的各类信息并输出自动驾驶的控制信息至控制模块;
20、所述车辆计算平台处理感知模块获取的各类信息的方式如下:
21、车辆计算平台记录并通过双目视觉图像信息进行车道线、障碍物识别与位置计算;
22、车辆计算平台通过超声波雷达以及毫米波雷达获取的信息,结合踏板开度与驾驶员操作信息,进行人机交互设计与车速反馈控制;
23、车辆计算平台输出的自动驾驶控制信息为控制车辆纵向运行的牵引与制动的线控信号;
24、所述控制模块接收决策模块提供的决策信息后,结合车辆属性建立满足数字轨道胶轮电车动力学模型,以达到对车辆纵向速度的平稳控制;
25、控制模块依据信号系统提供的道路信息中列车位置信息、站点信息、开门侧信息、到站信息,结合车辆速度,进行自动开门以及自动报站功能的控制;控制模块依据信号系统提供的道路信息中转弯信息,实现自动转向灯的控制。
26、优选的,所述自动驾驶系统具有三种驾驶模式:人工驾驶模式、横向自动驾驶模式以及全自动驾驶模式;
27、在驾驶模式由人工驾驶模式切换至横向自动驾驶模式时,控制系统对车辆在轨条件进行判断,若车辆在轨条件满足则车辆进入横向自动驾驶模式,车辆根据传感器的参数进行横向自动控制,若车辆在轨条件不满足则继续保持人工驾驶模式,并提示驾驶员不满足切换条件;
28、在驾驶模式由横向自动驾驶模式切换至全自动驾驶模式时,控制系统判断车辆的车速与方向盘扭矩是否满足阈值条件,若满足阈值条件则车辆进入全自动驾驶模式,若不满足阈值条件则车辆继续保持横向自动驾驶模式。
29、优选的,所述自动驾驶系统的局部路径的规划方法如下:
30、将车辆、行人或障碍物在车辆行驶轨迹内的存在形式设定为消失或存在;
31、当车辆、行人或障碍物的存在形式为消失时,则车辆正常运行;
32、当行人的存在形式为存在时,则车辆采取制动措施;
33、当障碍物、车辆的存在形式为存在时,若障碍物、车辆位于警戒范围内,则车辆采取制动措施,反之则正常运行。
34、优选的,所述自动驾驶系统的纵向牵引制动控制方法如下:
35、车辆通过多铰接车动力学仿真模型,进行牵引、制动力分配研究,在车辆纵向动力学模型中,将牵引力制动力比例参数化,以提高车辆横向稳定性和循迹控制精度为目标,建立列车的横-纵向耦合动力学模型,优化牵引/制动力的配比关系;
36、决策模块根据激光雷达与视觉传感器反馈的障碍物信息,进行如下场景区分:
37、当感知模块检测不到障碍物时,车辆进行自适应速度续航;
38、当感知模块检测到前方车辆/行人/障碍物时,车辆进行固定距离跟车行驶;
39、当纵向牵引制动控制为纵向速度控制时,车辆通过数字轨道地图获取建议车速,将建议车速作为纵向控制系统的目标车速输入,同时结合当前车速,利用pi控制算法进行目标加速度解算;
40、当纵向加速度计算模式为跟车距离控制时,车辆通过车侧设备获取前方障碍物相对于车辆的位置,同时,根据目标种类确定不同的跟车距离,并将跟车距离作为目标距离,对相对距离进行pd控制;
41、当纵向控制系统的模式位于踏板模式时,域控制器将根据纵向控制所需的加速度,计算油门踏板开度与制动踏板开度,通过总线将纵向控制的虚拟踏板指令发送给车辆控制器执行;
42、当车辆位于力矩模式时,纵向控制系统将计算出的加速度与力矩线性转化为踏板开度;
43、为了实现纵向自动控制的力矩分配的目的,当纵向自动控制的模式位于力矩模式时,首先需根据加目标加速度的符号确定此时车辆需要牵引力还是需要制动力,如果车辆处于牵引状态,那么将由电机提供所有的牵引力;如果车辆处于制动状态,那么将由电机提供电制动、液压系统提供液压制动;
44、当纵向控制系统需要电机提供牵引力或者制动力时,将根据所需电机扭矩的大小和电机的能力值大小进行区间判断,当纵向控制系统在力矩模式下制动时,将根据车速进行区间判断,当车速大于一定阈值时,将制动力的需求值和电制动的能力值进行对比,若制动力的需求值比电制动的能力值大,那么需要电制动+液压制动同时工作,若制动力的需求值比电制动的能力值小,那么只需电制动提供制动力即可;当车速小于一定阈值时,无论液压制动是否参与工作,随着车速的降低,电制动与液压制动将逐步切换;当电制动反馈的实际力矩小于请求力矩时,为了确保车辆的行驶安全,液压制动也需参与工作。
45、优选的,所述自动驾驶系统的人机交互设计方法如下:
46、车辆在全自动驾驶状态下,按照数字地图计算的基于用于曲率的循迹车速行驶,车辆在路口默认停车,驾驶员踩下油门踏板后继续行驶;
47、若驾驶员踩下踏板,且绝对值比巡航建议值大,则进入人工接管状态;
48、若驾驶员松开踏板,则回到自动驾驶状态;在自动驾驶状态下,利用巡航速度与实际车速之间的车速差做反馈控制,控制加速度变化率、加速时间。
49、与现有技术相比,本发明的有益效果是:本发明基于车载雷达、视觉传感器等设备,对道路前方以及视野盲区内一定距离内的车辆、行人等障碍物进行探测,使车辆能够及时感知危险工况,并通过减速、紧急制动规避事故风险;本发明采集雷达点云数据,进行离线数据分析,研究障碍物特征提取方法,结合三维点云数据,准确标注障碍物类别及距离;本发明基于视差原理,对双目相机左右视图进行像素匹配,获得图像深度图,实现基于视觉的障碍物测距;
50、本发明通过多传感器融合数据处理,综合获取前方障碍物方位与距离,进行动态轨迹预测,结合车辆动力学模型进行纵向加减速控制;本发明结合车辆实际运行线路与数字轨道地图提供的道路曲率、交通基础设施等信息,对道路行驶车速进行规划与设计;
51、本发明基于电子导向胶轮车专有路权的特性,进行局部路径规划,对车辆进行牵引控制,从而更加安全。
- 还没有人留言评论。精彩留言会获得点赞!