无人机飞行控制方法、装置、设备及存储介质与流程
本发明涉及无人机,尤其涉及一种无人机飞行控制方法、装置、设备及存储介质。
背景技术:
1、无人飞行器能够较好的实现其自主飞行控制,很大程度上依赖于是能否较好的感知自身的姿态、位置,这个对无人飞行器来说还是比较重要的。无人飞行器是由多传感器组成的,一般有全球定位系统(gps)、惯性导航系统以及摄像机等。对于无人飞行器的定位来说,目前来说全球定位系统是一种主流的定位方法。
2、gps信号容易受到电磁等干扰影响,在很多情况下gps信号无法获取,比如某些室内、一些矿井内、山洞内,另外gps信号非常不稳定。惯性导航系统虽然具有很多优点,但是它也有测量误差,把偏差带给控制系统,而且惯导系统的价格一般比较昂贵,高精度的陀螺仪的价格更是让人无法接受。激光和雷达虽然有比较高的测量精度、抗噪声的干扰能力也比较好,但是其整体硬件的设备太重,尤其是相对于小型的无人飞行器而言。
技术实现思路
1、本发明的主要目的在于提供一种无人机飞行控制方法、装置、设备及存储介质,旨在解决现有技术中如何低成本、高精度的无人机飞行姿态控制的技术问题。
2、为实现上述目的,本发明提供了一种无人机飞行控制方法,所述无人机飞行控制方法应用于无人机,所述无人机上设有视觉传感器,所述无人机飞行控制方法包括:
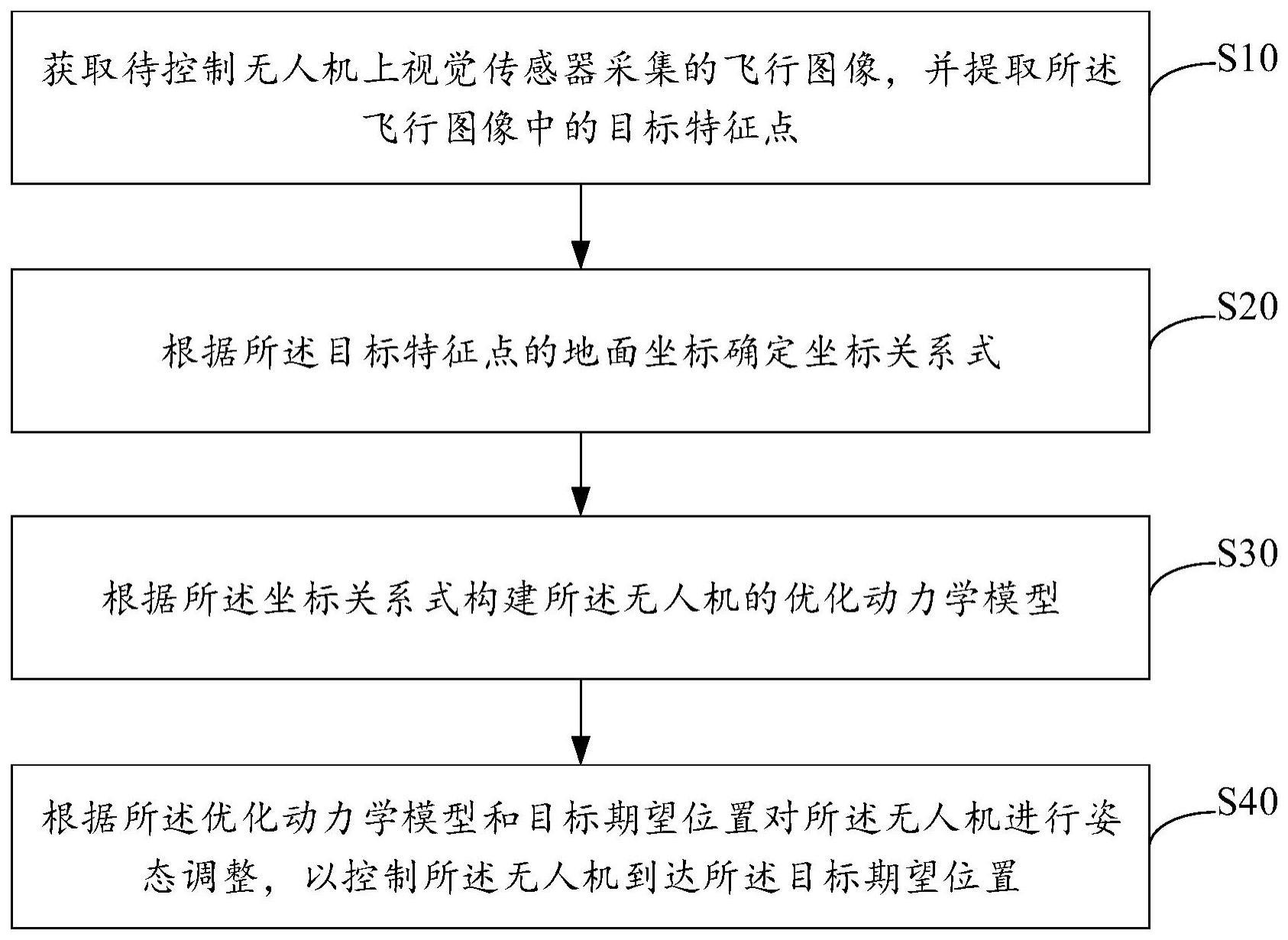
3、获取无人机上视觉传感器采集的飞行图像,并提取所述飞行图像中的目标特征点;
4、根据所述目标特征点的地面坐标确定坐标关系式;
5、根据所述坐标关系式构建所述无人机的优化动力学模型;
6、根据所述优化动力学模型和目标期望位置对所述无人机进行姿态调整,以控制所述无人机到达所述目标期望位置。
7、可选地,所述根据所述目标特征点的地面坐标确定坐标关系式,包括:
8、根据所述地面坐标和所述无人机的当前线速度确定所述目标特征点的图像坐标;
9、根据所述图像坐标确定机体焦距;
10、根据所述机体焦距和所述图像坐标确定坐标关系式。
11、可选地,所述根据所述机体焦距和所述图像坐标确定坐标关系式,包括:
12、获取所述无人机的当前角速度和所述目标特征点的当前机体速度;
13、根据所述图像坐标确定投影坐标和投影矩阵;
14、根据所述当前角速度、所述当前机体速度、所述投影坐标、所述投影矩阵以及所述机体焦距确定坐标关系式。
15、可选地,所述根据所述坐标关系式构建所述无人机的优化动力学模型,包括:
16、根据所述目标特征点的投影坐标进行质心定义,确定所述目标特征点的质心;
17、获取期望目标矢量;
18、根据所述期望目标矢量、所述质心以及所述坐标关系式构建所述无人机的优化动力学模型。
19、可选地,所述根据所述期望目标矢量、所述质心以及所述坐标关系式构建所述无人机的优化动力学模型,包括:
20、根据所述质心和所述期望目标矢量确定所述目标特征点的测量差异;
21、根据所述测量差异和所述坐标关系式确定所述目标特征点的导数;
22、获取所述无人机的初始动力学模型;
23、根据所述初始动力学模型和所述导数构建所述无人机的优化动力学模型。
24、可选地,所述根据所述优化动力学模型和目标期望位置对所述无人机进行姿态调整,包括:
25、根据所述优化动力学模型进行误差定义,确定速度误差、姿态误差以及综合误差;
26、根据所述速度误差、所述姿态误差、所述综合误差以及所述优化动力学模型构建矢量控制器;
27、根据所述矢量控制器和所述目标期望位置对所述无人机进行姿态调整。
28、可选地,所述根据所述矢量控制器和所述目标期望位置对所述无人机进行姿态调整,包括:
29、根据所述矢量控制器、速度误差、所述姿态误差以及所述综合误差构建飞行控制律;
30、获取所述无人机的当前位置、当前速度以及当前角度;
31、根据所述飞行控制律、所述目标期望位置、所述当前位置、所述当前速度以及所述当前角度确定目标飞行速度、目标飞行姿态以及目标飞行位置;
32、根据所述目标飞行速度、所述目标飞行姿态以及所述目标飞行位置对所述无人机进行姿态调整。
33、此外,为实现上述目的,本发明还提出一种无人机飞行控制装置,所述无人机飞行控制装置包括:
34、获取模块,用于获取无人机上视觉传感器采集的飞行图像,并提取所述飞行图像中的目标特征点;
35、确定模块,用于根据所述目标特征点的地面坐标确定坐标关系式;
36、构建模块,用于根据所述坐标关系式构建所述无人机的优化动力学模型;
37、调整模块,用于根据所述优化动力学模型和目标期望位置对所述无人机进行姿态调整,以控制所述无人机到达所述目标期望位置。
38、此外,为实现上述目的,本发明还提出一种无人机飞行控制设备,所述无人机飞行控制设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人机飞行控制程序,所述无人机飞行控制程序配置为实现如上文所述的无人机飞行控制方法。
39、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有无人机飞行控制程序,所述无人机飞行控制程序被处理器执行时实现如上文所述的无人机飞行控制方法。
40、本发明的无人机飞行控制方法应用于无人机,所述无人机上设有视觉传感器,通过获取无人机上视觉传感器采集的飞行图像,并提取所述飞行图像中的目标特征点;根据所述目标特征点的地面坐标确定坐标关系式;根据所述坐标关系式构建所述无人机的优化动力学模型;根据所述优化动力学模型和目标期望位置对所述无人机进行姿态调整,以控制所述控制无人机到达所述目标期望位置。通过上述方式,根据视觉传感器采集的飞行图像确定目标特征点,根据目标特征点的地面坐标确定坐标关系式,从而构建优化动力学模型,最终基于优化动力学模型和目标期望位置对无人机进行姿态调整,以控制无人机到达目标期望位置,实现了基于飞行图像来辅助无人机的姿态控制,降低了无人机在对gps的依赖性,弥补了无人机在定位时的缺陷,提高了无人机的控制精度并改善了无人机的控制性能,同时降低了姿态控制时的硬件成本。
技术特征:
1.一种无人机飞行控制方法,其特征在于,所述无人机飞行控制方法应用于无人机,所述无人机上设有视觉传感器,所述无人机飞行控制方法包括:
2.如权利要求1所述的无人机飞行控制方法,其特征在于,所述根据所述目标特征点的地面坐标确定坐标关系式,包括:
3.如权利要求2所述的无人机飞行控制方法,其特征在于,所述根据所述机体焦距和所述图像坐标确定坐标关系式,包括:
4.如权利要求1所述的无人机飞行控制方法,其特征在于,所述根据所述坐标关系式构建所述无人机的优化动力学模型,包括:
5.如权利要求4所述的无人机飞行控制方法,其特征在于,所述根据所述期望目标矢量、所述质心以及所述坐标关系式构建所述无人机的优化动力学模型,包括:
6.如权利要求1所述的无人机飞行控制方法,其特征在于,所述根据所述优化动力学模型和目标期望位置对所述无人机进行姿态调整,包括:
7.如权利要求6所述的无人机飞行控制方法,其特征在于,所述根据所述矢量控制器和所述目标期望位置对所述无人机进行姿态调整,包括:
8.一种无人机飞行控制装置,其特征在于,所述无人机飞行控制装置包括:
9.一种无人机飞行控制设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人机飞行控制程序,所述无人机飞行控制程序配置为实现如权利要求1至7中任一项所述的无人机飞行控制方法。
10.一种存储介质,其特征在于,所述存储介质上存储有无人机飞行控制程序,所述无人机飞行控制程序被处理器执行时实现如权利要求1至7任一项所述的无人机飞行控制方法。
技术总结
本发明属于无人机技术领域,公开了一种无人机飞行控制方法、装置、设备及存储介质。所述无人机飞行控制方法应用于无人机,所述无人机上设有视觉传感器,该方法包括:获取无人机上视觉传感器采集的飞行图像,并提取飞行图像中的目标特征点;根据目标特征点的地面坐标确定坐标关系式;根据坐标关系式构建无人机的优化动力学模型;根据优化动力学模型和目标期望位置对无人机进行姿态调整,以控制无人机到达目标期望位置。通过上述方式,实现了基于飞行图像来辅助无人机的姿态控制,降低了无人机在对GPS的依赖性,弥补了无人机在定位时的缺陷,提高了无人机的控制精度,同时降低了姿态控制时的硬件成本。
技术研发人员:张丽
受保护的技术使用者:歌尔股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!