一种基于全回转推进器的AUV水平面控制方法与流程
本发明涉及auv航行控制,特别涉及一种基于全回转推进器的auv水平面控制方法。
背景技术:
1、自主式水下航行器(auv)作为人类探索和开发海洋的重要工具,其在军事和民用领域都有着很大的发展前景。
2、水下航行器的操纵性是一项重要的指标,随着auv执行任务的多样性与环境的复杂程度不断提高,对auv在水下航行的控制精度的要求也越来越迫切,而在执行任务时如果处于低微速的初始状态下,舵面的操纵能力大幅下降,难以实现auv的水平面控制,当存在水流速度干扰时,难以保持既定航向不变,且由于低微速航行工况下需要较大的回转半径才能实现航向的改变。
3、因此,如何实现auv低微速水平面控制,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提出了至少解决上述部分技术问题的一种基于全回转推进器的auv水平面控制方法,该方法基于全回转推进器实现了auv低微速水平面控制,有效解决了狭窄环境、低微速航行工况下auv操纵控制性能不足的问题。
2、为实现上述目的,本发明采取的技术方案为:
3、本发明实施例提供一种基于全回转推进器的auv水平面控制方法,包括以下步骤:
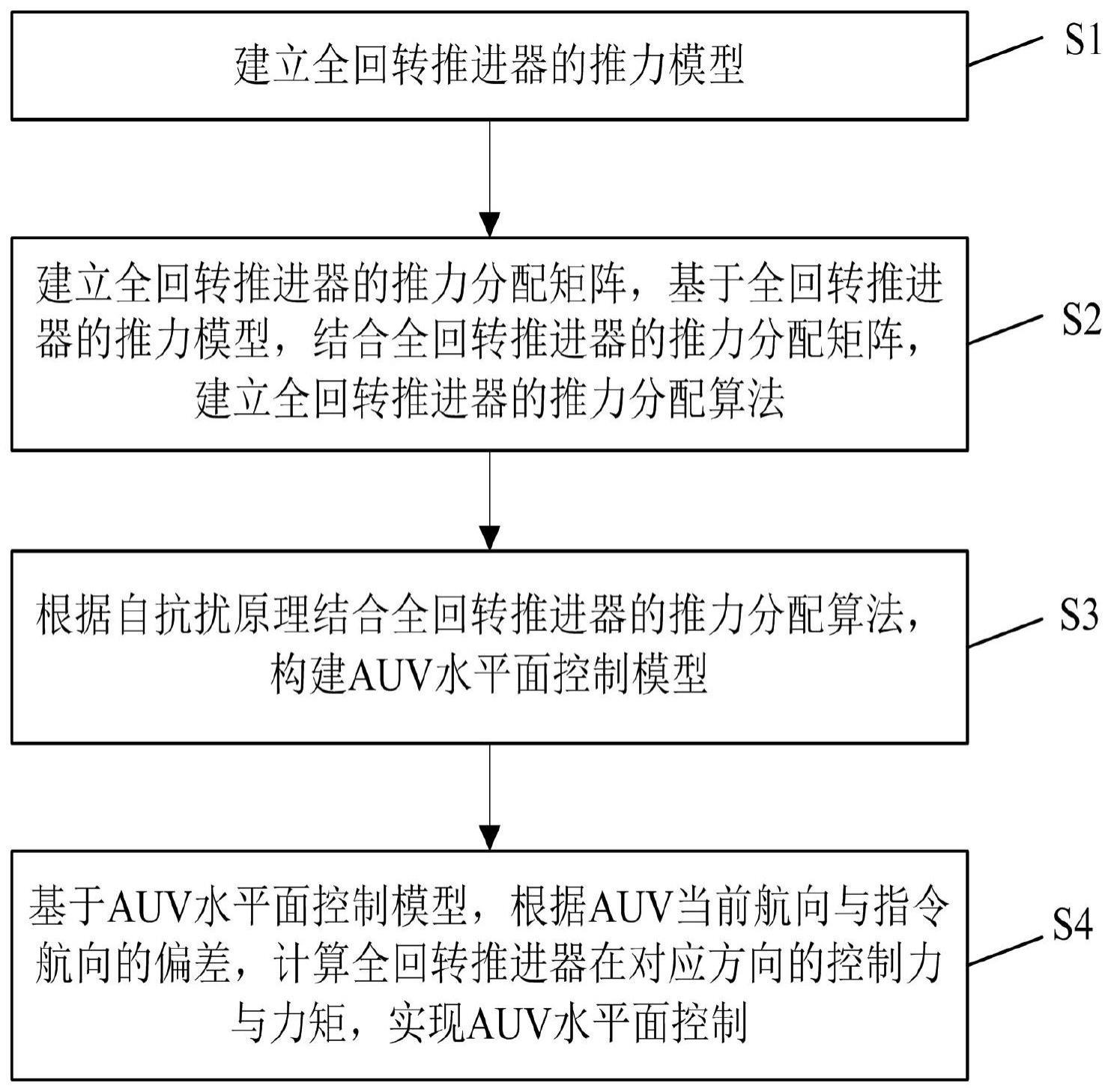
4、s1、建立全回转推进器的推力模型;
5、s2、建立全回转推进器的推力分配矩阵,基于所述全回转推进器的推力模型,结合所述全回转推进器的推力分配矩阵,建立全回转推进器的推力分配算法;
6、s3、根据自抗扰原理结合所述全回转推进器的推力分配算法,构建auv水平面控制模型;
7、s4、基于所述auv水平面控制模型,根据auv当前航向与指令航向的偏差,计算所述全回转推进器在对应方向的控制力与力矩,实现auv水平面控制。
8、进一步地,所述全回转推进器布置安装在auv本体的艏部和艉部。
9、进一步地,所述步骤s1中,所述全回转推进器的推力模型为:
10、
11、式中,ρ为水的密度;n为螺旋桨转速,dp为螺旋桨直径,kt、ktn分别表示螺旋桨、导管的推力系数。
12、进一步地,所述步骤s2中,所述全回转推进器的推力分配矩阵为:
13、
14、其中,fx表示作用在auv轴向的控制力,指向前方为正,fy表示作用在auv侧向控制力,指向右侧为正,m表示作用在auv上的控制力矩,逆时针方向为正,α1表示全回转推进器1的方位角,α2表示全回转推进器2的方位角,l1表示全回转推进器1的力臂,l2表示表示全回转推进器2的力臂,t1表示表示全回转推进器1的推力大小,t2表示表示全回转推进器2的推力大小;
15、将式(2)转换为如式(3)所示:
16、τ=b(α)t (3)
17、式中,τ=[fx fy m]t为控制力和控制力矩矩阵,
18、为推力分配增益矩阵,t=[t1 t2]为两个推进器的推力大小矩阵;
19、并以能耗最优、最小推力误差、最小回转角度变化与最小推力变化为优化目标,考虑回转角与推力约束以及回转角与推力变化率约束,建立推力分配算法,其中,推力分配目标函数及约束条件分别为:
20、所述推力分配目标函数为:
21、j=ttw1t+stw2s+(α-α0)tw3(α-α0)+(t-t0)tw4(t-t0) (4)
22、所述约束条件为:
23、
24、式中:t代表推力,上角标t代表转置,α为推进器的回转角,t0为上一时刻的推力,α0为上一时刻的回转角;tmin与tmax为推进器能产生的最小与最大推力,δtmin与δtmax为推进器能产生的最小与最大推力变化率;αmin与αmax为推进器的最小与最大回转角,δαmin与δαmax为推进器的最小与最大回转角变化率;s为推力的松弛变量,w1,w2,w3,w4为对角的权值矩阵。
25、进一步地,auv水平面控制模型包括:扩张状态观测器模型;
26、扩张状态观测器模型的构建具体包括:
27、建立auv水平面的运动学模型:
28、
29、式中:x、y、ψ分别为auv在大地坐标系下的纵向位移、横向位移与航向角,u、v、r分别为auv本体坐标系下的纵向速度、横向速度与航向角速度;
30、使用矩阵r表示转态转移矩阵:
31、
32、在auv操纵控制方程基础上,建立auv水平面动力学方程:
33、
34、式中:υ=[u,v,r]t为速度向量,η=[x,y,ψ]t为位置姿态向量,τ=[τx,τy,τψ]t为三自由度的控制力与力矩,d=[dx,dy,dψ]t为水平面三自由度的干扰,d为流体粘性水动力导数矩阵,其中xu为与速度u相关的轴向水动力导数,yv为与侧向速度v相关的侧向水动力导数,yr为与转向角速度r相关的侧向水动力导数,nv为与侧向速度v相关的转艏力矩水动力导数,nr为与转向角速度r相关的转艏力矩水动力导数;mrb为系统惯性矩阵,m为auv的质量,xg为重心在auv本体坐标系的x方向坐标,yg为重心在auv本体坐标系y方向坐标,iz为auv绕z轴的转动惯量;ma为流体惯性水动力导数矩阵,其中为与加速度相关的轴向水动力导数,为与侧向加速度相关的侧向水动力导数,为与转向角加速度相关的侧向水动力导数,为与侧向加速度相关的转艏力矩水动力导数,nr为与转向角加速度r相关的转艏力矩水动力导数;crb为科里奥利矩阵,zg为重心在auv本体坐标系的z方向坐标;r为转换矩阵;
35、将auv水平面动力学方程(8)转换为如式(9)所示:
36、
37、式中:m=mrb+ma,c=crb(υ)+d,f(t)=-m-1d;
38、定义auv状态变量为xh1=η,xh2=υ,xh3=f(t),将式(9)以状态空间形式描述为:
39、
40、根据扩张状态空间构建扩张状态观测器为:
41、
42、式中:lh1,lh2,lh3为观测器增益矩阵:
43、结合式(10)和式(11)建立扩张状态观测器的动态方程为:
44、
45、式中:为状态变量xh1的观测误差。
46、进一步地,auv水平面控制模型还包括:三通道耦合pd控制器模型;
47、三通道耦合pd控制器模型的构建具体包括包括:
48、将水平面动力学方程(9)转化为:
49、
50、根据观测器的观测结果建立水平面的控制率为:
51、
52、将其代入水平面动力学方程(9)中,构建三个单输入单输出的串联积分型系统:
53、
54、式中:τ10为解耦系统的控制率,构建pd控制器模型为:
55、
56、式中:η1d表示水平面纵向、横向位移和航向角指令,表示水平面纵向速度、横向速度和航向角速度指令,表示水平面纵向加速度、横向加速度和航向角加速度指令,k1p为与水平面纵向位移、横向位移和航向角有关的pd控制器增益矩阵,k1d为与水平面纵向速度、横向速度和航向角速度有关的pd控制器增益矩阵。
57、与现有技术相比,本发明具有如下有益效果:
58、1、本发明考虑到auv在低微速航行工况及狭窄环境下操纵控制性能不足,难以实现auv低微速水平面控制,提出基于全回转推进器的auv水平面控制方法,使用该方法可以实现auv低微速水平面控制,有效解决了auv低微速下因舵效低而难以实现航向改变和保持的问题。
- 还没有人留言评论。精彩留言会获得点赞!