一种余煤提升机自动控制系统及方法与流程
本技术涉及煤焦化工,尤其涉及一种余煤提升机自动控制系统及方法。
背景技术:
1、燃料供应厂焦炉在炼焦生产中,推焦车在平煤的过程中会带出部分余煤,这些余煤会被放置在推焦车的储煤仓中,当推焦车储煤仓料满后,推焦车会行使至焦炉平台的余煤提升机下储煤仓位置,由余煤提升机提至上储煤仓位置。待上储煤仓料满后,操作人员控制加煤车行驶至上储煤仓位置,将余煤回收至加煤车中,最后注入焦炉中,达到回收利用的作用。
2、余煤提升机普遍操作采用手动方式,操作人员凭经验认为储煤仓需要上煤时,到现场操作箱旁启动提升机,提升机运煤次数也是凭经验判断。由于储煤仓无任何检测手段,容易出现储煤仓料满后还继续运煤的情况,此时会出现煤粉洒落的现场。另外现场工作环境差,温度高。工作环境靠近焦炉,属于煤气区域,工人操作时存在安全隐患。
技术实现思路
1、本技术提供一种余煤提升机自动控制系统及方法,以解决手动操作无法监测储煤仓情况出现煤粉洒落情况容易浪费资源、引发安全隐患,余煤提升机工作效率降低的问题。
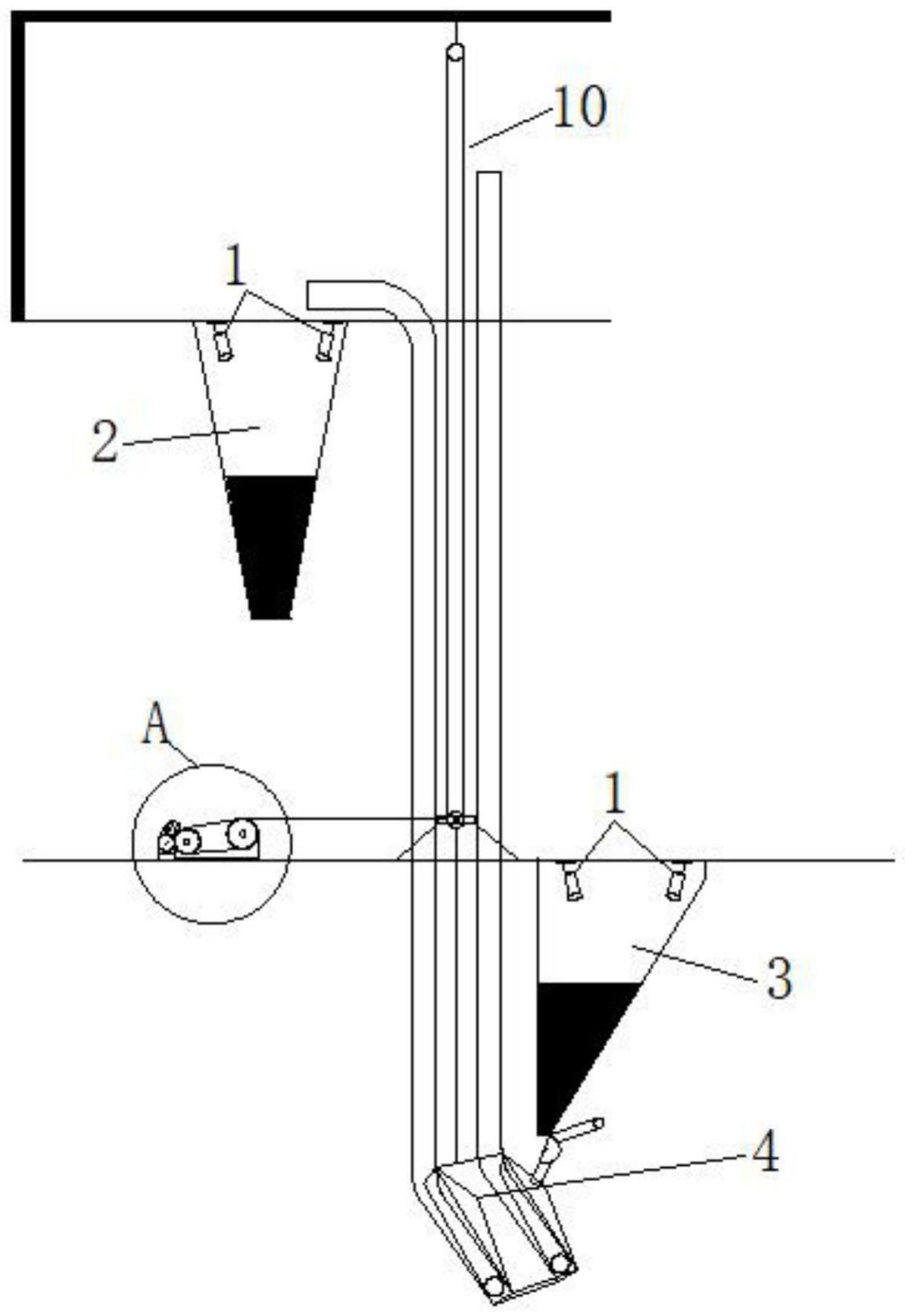
2、一方面,本技术提供一种余煤提升机自动控制系统,包括料位计、控制模块以及执行机构;所述控制模块与所述料位计通讯连接;所述执行机构连接余煤提升机的钢丝绳索,以驱动所述余煤提升机的余煤斗沿所述钢丝绳索进行往复运动,所述执行机构还与所述控制模块通讯连接。
3、所述料位计设置在所述余煤提升机的下储煤仓和上储煤仓中,用于采集下储煤仓料位信号以及上储煤仓料位信号;
4、所述控制模块被配置为:获取所述下储煤仓料位信号;
5、通过所述下储煤仓料位信号判断所述下储煤仓的物料状态,所述物料状态包括无料状态和有料状态;
6、如果所述物料状态为无料状态,则控制所述执行机构停止驱动所述余煤斗;
7、如果所述物料状态为有料状态,则在余煤斗装填余煤后控制所述执行机构驱动所述余煤斗上行至所述上储煤仓位置。
8、上述方案可以通过余煤提升机自动控制系统自动采集判断储煤仓情况,并控制余煤提升机的余煤斗沿所述钢丝绳索进行往复运动,以解决手动操作无法监测储煤仓情况出现煤粉洒落情况容易浪费资源、引发安全隐患,余煤提升机工作效率降低的问题。
9、可选的,所述控制模块还被配置为:
10、获取上储煤仓料位信号;
11、通过所述上储煤仓料位信号判断所述上储煤仓的满料状态,所述满料状态包括已料满状态和未料满状态:
12、如果所述满料状态为已料满状态,则控制所述执行机构停止驱动所述余煤斗;
13、如果所述满料状态为未料满状态,则控制所述执行机构驱动所述余煤斗下行至所述下储煤仓位置。
14、上述配置可以在所述上储煤仓已料满时,自动停止驱动所述余煤斗,进一步解决当所述上储煤仓已料满仍旧将余煤倾倒进所述上储煤仓造成煤粉洒落情况。
15、可选的,还包括高度传感器,所述控制模块与所述高度传感器通讯连接;所述高度传感器用于在所述余煤斗沿所述钢丝绳索进行往复运动时,采集所述余煤斗的运动高度;所述控制模块还被配置为:
16、根据设定的所述余煤斗的指定高度生成高度指令;
17、获取所述余煤斗的运动高度;
18、如果所述运动高度达到所述余煤斗的指定高度,则按照所述高度指令驱动所述余煤斗,以使所述余煤斗停止在所述上储煤仓位置或所述下储煤仓位置。
19、上述配置可以通过所述高度传感器采集的运动高度生成的所述高度指令驱动所述余煤斗停在指定的位置,可降低因停靠位置偏移而使后续余煤倾倒等造成煤粉洒落情况的几率。
20、可选的,所述执行机构包括电机以及减速机;所述电机通过所述减速机连接所述钢丝绳索。
21、所述减速机可以把所述电机的扭矩放大并实现将电机的高转速转化为低转速,实现对所述余煤斗运动速度的控制。
22、可选的,所述控制模块被配置为:
23、根据所述指定高度规划从下储煤仓到上储煤仓的第一运动轨迹,所述第一运动轨迹包括上升起始位、上升匀速位、上升第一减速位、上升第二减速位、上升停止位;
24、当所述余煤斗位于所述上升起始位,生成上升加速指令,所述上升加速指令用于控制所述电机加速转动;
25、当所述余煤斗的运动高度达到所述上升匀速位,生成上升匀速指令,所述上升匀速指令用于控制所述电机匀速转动;
26、当所述余煤斗的运动高度达到所述上升第一减速位,生成上升第一减速指令,所述上升第一减速指令用于控制所述电机减速转动;
27、当所述余煤斗的运动高度达到所述上升第二减速位,生成上升第二减速指令,所述上升第二减速指令用于控制所述电机进一步减速转动;
28、当所述余煤斗的运动高度达到所述上升停止位,生成上升停止指令,所述上升停止指令用于控制所述电机停止转动。
29、通过所述第一运动轨迹上的指定高度对应的指令可使所述余煤斗在上升过程中既可以保持平稳不洒落余煤,又可以保持一定的运动速度提高运煤效率,还可以使所述余煤斗停靠的位置更为准确。
30、可选的,所述控制模块被配置为:
31、根据所述指定高度规划从上储煤仓到下储煤仓的第二运动轨迹,所述第二运动轨迹包括下降起始位、下降匀速位、下降第一减速位、下降第二减速位、下降停止位;
32、当所述余煤斗位于所述下降起始位,生成下降加速指令,所述下降加速指令用于控制所述电机加速转动;
33、当所述余煤斗的运动高度达到所述下降匀速位,生成下降匀速指令,所述下降匀速指令用于控制所述电机匀速转动;
34、当所述余煤斗的运动高度达到所述下降第一减速位,生成下降第一减速指令,所述下降第一减速指令用于控制所述电机减速转动;
35、当所述余煤斗的运动高度达到所述下降第二减速位,生成下降第二减速指令,所述下降第二减速指令用于控制所述电机进一步减速转动;
36、当所述余煤斗的运动高度达到所述下降停止位,生成下降停止指令,所述下降停止指令用于控制所述电机停止转动。
37、通过所述第二运动轨迹上的指定高度对应的指令可使所述余煤斗在下降过程中既可以保持一定的运动速度提高工作效率,还可以使所述余煤斗停靠的位置更为准确。
38、可选的,所述控制模块还被配置为:
39、控制余煤提升机的振煤棒将余煤振至所述余煤斗中;
40、等待预先设定的时间后,控制所述执行机构驱动所述余煤斗。
41、通过所述振煤棒可缓解储煤仓里面的余煤发生堵塞,导致余煤无法落进所述余煤斗中的情况。
42、可选的,所述控制模块包括主令器、plc控制器以及变频器;所述plc控制器通过所述变频器连接所述电机;所述高度传感器、所述plc控制器以及所述主令器互相通信连接。
43、所述plc控制器具有可靠性高,抗干扰能力强,功能完善,适应性强,编程语言简单,维修简单,体积小,重量轻且耗能低的优点,通过与所述变频器,所述主令器的配合控制所述余煤提升机自动控制系统的运作,提高工作效率。
44、可选的,所述主令器被配置为:
45、根据设定所述余煤斗的上升极限位以及下降极限位生成急停指令;
46、获取所述余煤斗的运动高度;
47、如果所述运动高度达到所述上升极限位或所述下降极限位,则将所述急停指令发送至所述plc控制器;
48、所述plc控制器被配置为:发送急停指令给所述变频器,以使所述变频器执行所述急停指令。
49、上述配置为了预防所述余煤斗在下降或者上升过程中,出现意外冲出上升停止位或下降停止位。
50、可选的,所述高度传感器还被配置为:将采集的所述余煤斗到达所述上升极限位以及所述下降极限位高度信息发送至所述plc控制器;
51、所述plc控制器被配置为:记录所述上升极限位以及所述下降极限位高度信息并判断所述余煤斗是否在预先设置的上升停止位以及下降停止位内行使:
52、如果所述余煤斗不是在所述上升停止位以及下降停止位内行使,则发送急停指令给所述变频器;
53、所述变频器被设置为:执行所述急停指令。
54、上述配置可以在所述主令器出现故障时,通过所述高度传感器发送所述上升极限位以及所述下降极限位高度信息至所述plc控制器来预防所述余煤斗在下降或者上升过程中,出现意外冲出上升停止位或下降停止位的情况。
55、另一方面,本技术提供一种余煤提升机自动控制方法,应用于余煤提升机自动控制系统,所述方法包括:
56、获取下储煤仓料位信号;
57、通过所述下储煤仓料位信号判断下储煤仓的物料状态,所述物料状态包括无料状态和有料状态;
58、如果所述物料状态为无料状态,则控制执行机构停止驱动所述余煤斗;
59、如果所述物料状态为有料状态,则在余煤斗装填余煤后控制所述执行机构驱动所述余煤斗上行至所述上储煤仓位置。
60、通过上述方法以解决手动操作无法监测储煤仓情况出现煤粉洒落情况容易浪费资源、引发安全隐患,余煤提升机工作效率降低的问题。
61、由以上技术方案可知,本技术提供一种余煤提升机自动控制系统及方法,所述系统包括料位计、控制模块以及执行机构。所述控制模块与所述料位计通讯连接;所述执行机构连接所述余煤提升机的钢丝绳索,所述执行机构还与所述控制模块通讯连接,所述料位计设置在所述余煤提升机的下储煤仓和上储煤仓中,用于采集下储煤仓料位信号以及上储煤仓料位信号。所述方法包括所述控制模块获取下储煤仓料位信号;通过下储煤仓料位信号判断下储煤仓的物料状态,如果物料状态为无料状态,则控制所述执行机构停止驱动余煤斗;如果物料状态为有料状态,则在所述余煤斗装填余煤后控制所述执行机构驱动所述余煤斗上行至上储煤仓位置,以解决手动操作无法监测储煤仓情况出现煤粉洒落情况容易浪费资源、引发安全隐患,余煤提升机工作效率降低的问题。
- 还没有人留言评论。精彩留言会获得点赞!