贴片机双驱龙门平台的多轴协同控制方法与流程
本发明属于贴片机龙门平台的运动控制,尤其涉及多轴协同控制。
背景技术:
1、双驱龙门平台是贴片机中典型的驱动结构,双驱龙门平台具有推力大,负载强,精度高等特点,在现代工业高端制造领域愈加受到关注和应用。在贴片机龙门平台系统中,机械横梁横跨在平台两端并由两直线电机共同驱动以实现y轴方向进给运动,移动工作台在另一电机驱动下沿横梁所在x轴方向进行定位运动,通过两轴之间的密切配合与协调运动共同完成复杂的生产任务。需要注意的是,相比于工作台的单驱直线运动控制,xy多轴协同运动控制显得更为复杂和重要,其控制精度直接影响着贴片机龙门平台系统的运动性能和加工工艺。因此,研究贴片机双驱龙门平台多轴协同控制问题具有重要的实际意义。
2、在整个控制系统中,多个直线电机驱动方式能够使得系统获得较大推力和速度,但同时也给系统增加了不确定性风险和控制难度。这主要是由于两方面因素,其一,现实条件下很难保证三个直线电机具备完全相同的机械参数和机电特性;其二,机械横梁同步运动与负载定位运动相互影响且具有复杂的耦合动力学关系。另外,贴片机龙门平台系统中不可避免会存在参数不确定性及外界未知非线性扰动的问题,例如负载变化,推力波动,测量噪声等,这些都很容易造成较大的运动误差和系统震荡。严重时甚至会导致机械设备损坏,威胁操作人员的生命安全。
技术实现思路
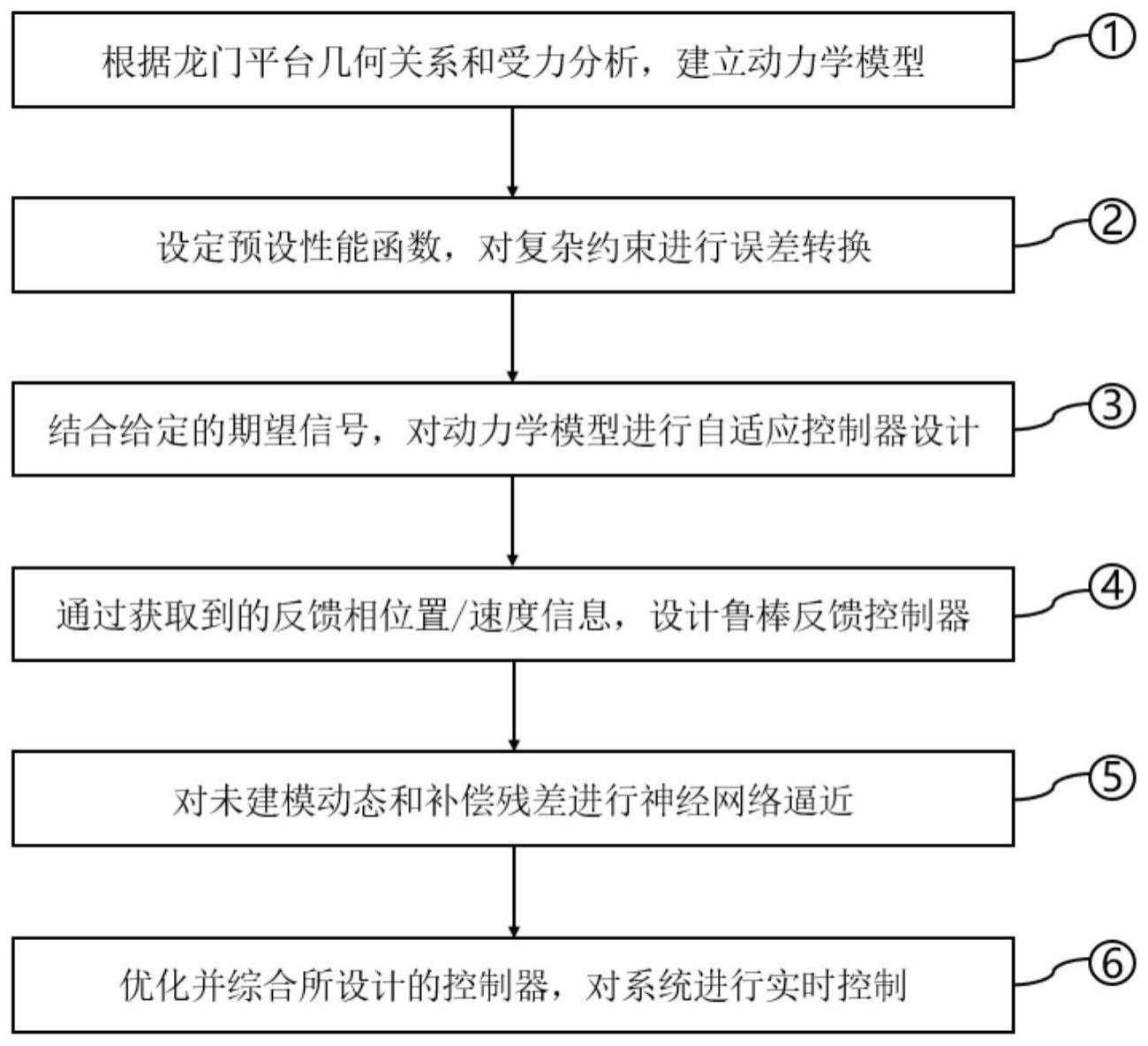
1、本发明是为了解决现有贴片机双驱龙门平台控制系统中,由于无法保证电机一致性、机械横梁同步运动与负载定位运动存在耦合动力学关系、以及外界干扰都会对系统的控制造成误差,导致系统不确定性风险高且控制难度大的问题,现提供贴片机双驱龙门平台的多轴协同控制方法。
2、贴片机双驱龙门平台的多轴协同控制方法,分别设计期望模型补偿控制器、鲁棒反馈控制器和神经网络控制器,并将设计的控制器输出之和作为贴片机龙门平台的总控制信号,利用该总控制信号对贴片机龙门平台的x轴、y1轴和y2轴进行多轴协同控制;
3、所述期望模型补偿控制器表达式为:
4、
5、其中,υa为期望模型补偿控制器的输出,φd为含有期望信息的回归量矩阵,为的估计值,为贴片机龙门平台系统耦合动力学模型中不确定参数构成的系数矩阵,
6、
7、其中,mhk为归一化后贴片机中移动工作台的质量,bxk为归一化后贴片机龙门平台x轴处的粘滞摩擦系数,axk为归一化后贴片机龙门平台x轴处的库仑摩擦系数,myk为归一化后贴片机龙门平台中横梁的总质量,byk为归一化后贴片机龙门平台y1轴和y2轴导轨处的粘滞摩擦系数之和,ayk为归一化后贴片机龙门平台y1轴和y2轴导轨处的库仑摩擦系数之和,jk为归一化后的转动惯量,kαk为归一化后的等效旋转刚度,bsk为归一化后贴片机龙门平台y2轴和y1轴导轨处的粘滞摩擦系数之差,ask为归一化后贴片机龙门平台y2轴和y1轴导轨处的库仑摩擦系数之差,和分别为归一化后贴片机龙门平台x轴和y轴动力学中非线性扰动的常值,为归一化后贴片机龙门平台旋转动力学中非线性扰动的常值;
8、所述鲁棒反馈控制器表达式为:
9、υe=-mqz-1g-kds-keε,
10、其中,υe为鲁棒反馈控制器的输出,mq为归一化后贴片机龙门平台的惯性矩阵,s为滑模变量,z=diag[z1,z2,z3],
11、si为误差转换函数且有:
12、
13、ε=[ε1,ε2,ε3]为无约束的转换误差,中间变量ri=ei(t)/ρi(t),ei(t)为t时刻的误差矢量,ei(0)为误差矢量初始值,为超调量调节系数,
14、ρi为性能函数且表达式如下:
15、
16、ρi0为稳态误差初始值,ρi∞为稳态误差最大值,为误差收敛速率,
17、λ为控制增益矩阵,kd为比例反馈矩阵,ke为鲁棒增益矩阵;
18、所述神经网络控制器表达式为:
19、
20、其中,υnn为神经网络控制器的输出,为神经网络权重矢量,χ为神经网络输入矢量,χ=[χ1,χ2,...,χm],m为神经网络的神经元总层数,j=1,2,...,m,r(χ)为神经网络多层神经元的总输出,η为鲁棒项系数,sign(·)表示符号函数;
21、所述贴片机龙门平台的总控制信号v=[v1,v2,v3]:
22、v=υa+υe+υnn。
23、进一步的,根据下式利用贴片机龙门平台的总控制信号实现对贴片机龙门平台x轴、y1轴和y2轴的协同控制:
24、
25、其中,sm为贴片机龙门平台横梁两侧电机之间的距离,α为贴片机龙门平台横梁的实际旋转角度,kxk为归一化后的x轴电机推力常数,kmy=k2/k1,k1和k2分别为贴片机龙门平台y1轴和y2轴电机推力常数,ux、u1和u2分别为x轴、y1轴和y2轴的控制输入。
26、进一步的,上述贴片机龙门平台系统耦合动力学模型为:
27、
28、其中,cq、bq、kq和aq分别为归一化后的科氏力矩阵、粘滞摩擦矩阵、等效刚度矩阵和库伦摩擦矩阵,q为贴片机龙门平台系统状态矢量矩阵且q=[x(t),y(t),α(t)],x(t)和y(t)分别为t时刻贴片机龙门平台x轴和y轴的实际位移,α(t)为t时刻贴片机龙门平台系统横梁的实际旋转角度,和分别为贴片机龙门平台系统轴运动的速度和加速度矢量矩阵,非线性函数和分别为归一化后非线性扰动的常值矩阵和时变矩阵。
29、进一步的,上述贴片机龙门平台系统的误差矢量ei(t)的约束条件为:
30、
31、其中,ei(t)=q-qd=[x(t)-xd(t),y(t)-yd(t),α(t)],
32、qd=[xd(t),yd(t),αd(t)]为贴片机龙门平台系统的期望轨迹信号矩阵,xd(t)和yd(t)分别为t时刻贴片机龙门平台x轴和y轴的期望位移,αd(t)为贴片机龙门平台横梁的期望旋转角度且αd(t)=0。
33、进一步的,上述
34、
35、其中,h为贴片机中移动工作台质心的偏移距离,x(t)为贴片机龙门平台系统横梁x轴的实际位移,sg为贴片机龙门平台y1轴和y2轴导轨之间的距离。
36、进一步的,贴片机龙门平台系统的回归量包括残差矩阵部分和含有期望信息部分,表达式如下:
37、
38、其中,为仅含有期望信息的回归量矩阵,为回归量残差矩阵。
39、进一步的,上述滑模变量s的表达式为:
40、
41、其中,
42、进一步的,上述神经网络中第j层神经元的输出r(χj)为:
43、
44、其中,cj和bj分比为神经网络核函数的中心坐标矢量和宽度。
45、进一步的,上述神经网络权重矢量的自适应率为:
46、
47、其中,φ学习率更新矩阵。
48、本发明的有益效果:
49、本发明提出了一种适用于贴片机龙门平台的精密多轴协同控制方法,解决了复杂生产环境下,抗干扰能力差,控制性能不能预先设定等难题。本发明所述的贴片机双驱龙门平台的多轴协同控制方法,是基于预设性能技术与自适应神经网络控制方法共同实现的。其中,提前设计预设性能函数以规划系统的期望性能,使用误差变换技术将约束问题进行简化处理;自适应环节中参数估计算法能够实现系统参数快速收敛,然后通过所设计的自适律对模型进行精确补偿;鲁棒反馈模块是基于实际误差信号所设计的控制器,主要用于镇定名义系统;神经网络补偿器用来逼近未建模动态与外部环境中的干扰,进一步提高系统的稳定性。最后经过在龙门运动实验台上进行对比实验,验证了所提的同步控制方法的有效型与优越性。
- 还没有人留言评论。精彩留言会获得点赞!