基于非洲秃鹫优化算法的太空采矿机器人运动控制方法
本发明涉及一种太空采矿机器人运动控制方法,具体为一种基于非洲秃鹫优化算法的太空采矿机器人运动控制方法,属于航天。
背景技术:
1、矿产资源、可利用资源等是我们发展、活动的物质基础,更是世界科技水平向前发展的基本保障。伴随着人类对于资源的高强度开采及日益增长的资源需求,矿产资源的日渐枯竭将成为人类未来面对的严峻危机。
2、因此,为解决地球矿产资源日益枯竭的难题,设计太空采矿机器人,开展太空资源的开发与探测势在必行。对于近地小行星而言,太空采矿机器人需要适应各种地貌,近真空等复杂多变的环境,这对太空采矿机器人的结构以及运动的可靠性都提出了较高的要求。
3、目前,国内对于火星、月球上的探测车的研究有了一定的进展,但是对于这种以近地小行星为对象的太空采矿机器人的研究还处于起步阶段,对于太空采矿机器人及其相关控制技术的研究还很少。针对近地小行星表面崎岖松软的环境,现在很多的协调运动控制模型都比较复杂,且控制精度及运动可靠性较低。因此,有必要设计一种简单高效的控制方法。
4、基于此,本技术提出基于非洲秃鹫优化算法的太空采矿机器人运动控制方法。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供基于非洲秃鹫优化算法的太空采矿机器人运动控制方法,实现太空采矿机器人在小行星表面的高准确度运行,提高其运行性能及控制安全性。
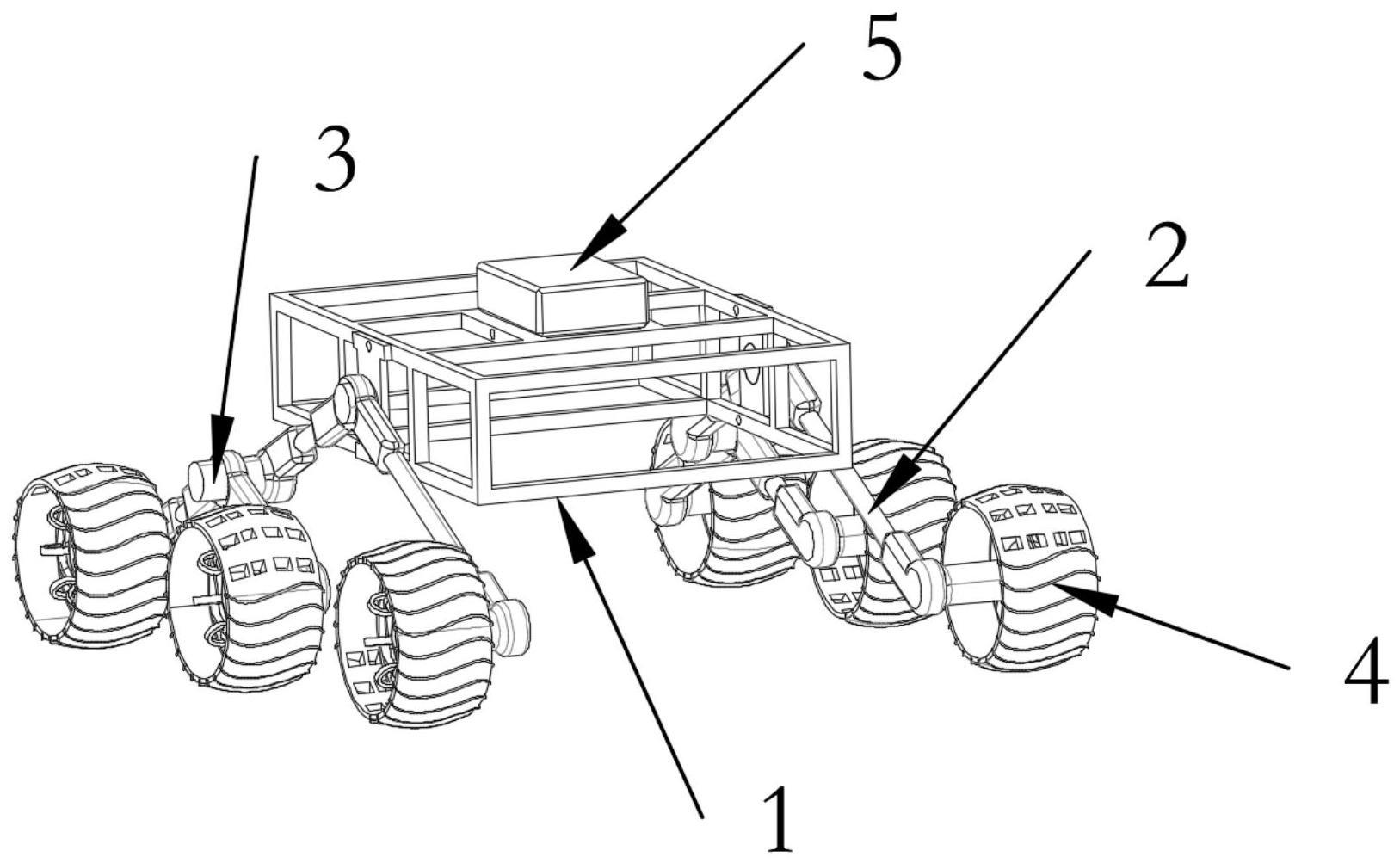
2、本发明通过以下技术方案来实现上述目的:基于非洲秃鹫优化算法的太空采矿机器人运动控制方法,包括基于六轮太空采矿机器人所构建的太空采矿机器人的运动学模型,所述六轮太空采矿机器人包括车体,所述车体的两侧连接有主悬架,所述主悬架的一端连接有副悬架,所述主悬架与副悬架上均转动连接有车轮,所述车体上安装有控制模块;
3、其控制方法包括以下步骤:
4、步骤一、以六轮太空采矿机器人为研究对象,首先建立太空采矿机器人的运动学模型,计算其各个位置参量;
5、步骤二、加入校正网络环节来提高太空采矿机器人控制系统的整体性能;
6、步骤三、采用改进的非洲秃鹫优化算法对太空采矿机器人的控制系统进行自适应优化;
7、步骤四、基于非洲秃鹫算法提出相应改进,以提高非洲秃鹫算法的算法性能;
8、步骤五、通过上述优化方式,设计改进的非洲秃鹫优化算法,借此对太空采矿机器人的控制系统参数进行最优化选取。
9、作为本发明再进一步的方案:步骤一中,各个位置参量由以下公式确定:
10、θ=θ0+∫0tw·dt (1)
11、x=x0+∫0tvcosθ·dt (2)
12、y=y0+∫0tvsinθ·dt (3)
13、其中,θ0、x0、y0分别表示太空采矿机器人的初始的角度、横坐标与纵坐标。v表示太空采矿机器人运行速度;
14、太空采矿机器人在运动过程中,行进时间为δt后,其在全局坐标系下的运动距离偏差描述为:
15、
16、角度偏差可以描述为:
17、
18、设δv=vr-vl;当δt→0时,可得
19、δd=v×δt×δθ (6)
20、
21、进行拉氏变换后可得
22、
23、太空采矿机器人左右轮驱动电机与其机器人本身的线速度之间的关系如下:
24、vr(s)=g(s)ur(s) (9)
25、vl(s)=g(s)ul(s) (10)
26、其中,g(s)表示太空采矿机器人驱动电机的传递函数,ul(s)和ur(s)分别表示太空采矿机器人左右电机的控制电压;
27、则太空采矿机器人的运动距离偏差可以表示为:
28、
29、其中,δu(s)为左右2个电机的控制电压差的拉氏变换;
30、根据太空采矿机器人的电机系统,经过拉式变换后可得如下函数关系:
31、ua(s)=e(s)+raia(s)+slaia(s) (12)
32、其中,ua表示控制电机的电压,ra表示控制电路的电阻,la控制电路的电感,ia为电路电流,e表示由于电机角速度引起的反电势;
33、则由ia产生的电机输出扭矩mm(s)为:
34、
35、其中,为电机电磁时间常数,km为电机扭矩系数;
36、反电势e(s)由电机的旋转引起,表示为:
37、e(s)=keωm(s) (14)其中,ke为电机的反电势系数;
38、通过上述推导,经过对电机模型的分析,可得电机的传递函数g(s)为
39、
40、其中,r表示太空采矿机器人的车轮半径。
41、作为本发明再进一步的方案:步骤二中,超前校正环节的传递函数如下:
42、
43、其中,a为最大超前相位因子,t为最大超前相角的发生周期;
44、综上所述,得到修正之后的电机系统的传递函数如下:
45、
46、由此可得,太空采矿机器人控制系统的传递函数如下:
47、
48、通过上述公式建立太空采矿机器人控制系统传递函数,并由此搭建pid控制系统。
49、作为本发明再进一步的方案:步骤三中,非洲秃鹫优化算法(avoa)从非洲秃鹫的生活方式出发,模拟了非洲秃鹫的觅食和导航行为;
50、首先初始化种群,计算所有解的适应度,选择最佳解作为第一组的最佳秃鹫,选择次优解作为第二组的最佳秃鹫,使用其他解向第一组和第二组的最佳解移动。在每次适应度迭代中,将重新计算整个总体;
51、
52、式中,r(i)为除最优、次优秃鹫外的其他秃鹫位置;bestv1、bestv2分别为最优、次优秃鹫位置;l1、l2分别为0~1之间待测量参数,其和为1;pi为选择最佳秃鹫的概率;fi为其他秃鹫适应度;使用轮盘赌轮获得选择最佳解的概率,并为每组选择每个最佳解;
53、
54、计算秃鹫饥饿率;受秃鹫吃饱或饥饿速度的启发,进行数学建模,它也被用来从探索阶段转移到开发阶段;饱腹率呈下降趋势,模拟这种行为的公式如下:
55、
56、
57、其中,f表示秃鹫饥饿率,t表示当前迭代次数,t表示最大迭代次数,z是介于-1到1并且每次迭代都变化的随机数,h是介于-2到2之间的随机数,rand1是介于0到1之间的随机数。当z值降到0以下时,表示秃鹫饿了,如果z值增加到0,则表示秃鹫吃饱了。秃鹫总数的比例在下降,而且随着每次重复,下降的幅度更大。当f的值大于1时,秃鹫在不同区域寻找食物,进入探索阶段;如果f的值小于1,秃鹫进入开发阶段,秃鹫在最佳解的附近寻找食物;
58、在探索阶段时,整个种群中,秃鹫可以检查不同的随机区域,这可以基于两种不同的策略,并使用一个称为p1的参数来选择任一策略。此参数必须在搜索操作之前赋值,且其值应介于0和1之间,以确定如何使用这两种策略。要在探索阶段选择哪种策略,需要生成一个介于0和1之间的随机数该过程如下所示:
59、
60、p(i+1)=r(i)-|x×r(i)-p(i)|×f (24)
61、式中,秃鹫在两组最佳小组之一的随机距离附近随机搜索食物,其中p(i+1)是下一次迭代中的秃鹫位置向量,f是当前迭代中获得的秃鹫饱腹率。x是秃鹫随机移动的地方,以保护食物免受其他秃鹫的伤害,x被用作增加随机运动的系数向量,随机运动在每次迭代中都会发生变化,并使用公式x=2rand获得,其中rand是介于0和1之间的随机数;p(i)是秃鹫当前的矢量位置:
62、p(i+1)=r(i)-f+rand2×((ub-lb)×rand3+lb) (25)
63、式中,rand2和rand3为介于0和1之间的随机值,lb和ub表示变量的上界和下界;在搜索环境尺度上创建一个高随机系数,用来增加多样性并搜索不同的搜索空间区域,以此方式模拟秃鹫的运动;
64、进入开发阶段后,当f的值介于0.5和1之间时,秃鹫种群进入开发阶段的第一阶段。在第一阶段,执行两种不同的旋转飞行和围攻策略;p2用于确定每个策略的选择,且该值应介于0和1之间;在该阶段开始时,生成它是一个介于0和1之间的随机数;如果该数字大于或等于参数p2,则围攻策略将缓慢实施;然而,如果该随机数小于参数p2,则执行旋转飞行策略;该过程如下式所示:
65、
66、当|f|≥0.5时,秃鹫相对能量充足;当许多秃鹫聚集在一个食物源上时,它们可能会在食物获取上引起严重的冲突;在这种时候,身体强壮的秃鹫更喜欢不与其他秃鹫分享食物。
67、另一方面,弱小的秃鹫试图通过聚集在健康的秃鹫周围并引发小冲突来使其疲劳,以便从健康的秃鹫那里获取食物;对该步骤建模:
68、p(i+1)=|x×r(i)-p(i)|×(f+rand4)-(r(i)-p(i)) (27)
69、式中,rand4是介于0到1之间的随机数,用于增加随机系数;p(i)是秃鹫的当前位置向量,通过该位置向量可获得当前秃鹫与两组中的最佳秃鹫之一的距离;
70、秃鹫经常进行旋转飞行,用于模拟螺旋运动;螺旋模型已用于旋转飞行的数学建模。在这种方法中,所有秃鹫和两个最佳秃鹫中的一个之间建立了一个螺旋方程;旋转飞行用下式表示:
71、
72、p(i+1)=r(i)-(s1+s2) (29)
73、式中,rand5和rand6是介于0和1之间的随机数;s1和s2通过计算,更新秃鹫的位置;
74、如果|f|<0.5,则执行算法的此阶段;在该阶段开始时,生成这是一个介于0和1之间的随机数;秃鹫种群展开了围攻和争夺食物的侵略斗争,该过程下式所示:
75、
76、所有秃鹫向食物来源的移动都被检查过;有时,秃鹫会挨饿,而且会有大量的食物竞争,可能会在一个食物来源上积累几种秃鹫;通过以下公式用来描述秃鹫的这种运动:
77、
78、
79、同时,领头的秃鹫变得饥饿和虚弱,没有足够的能量对付其他秃鹫;另一方面,其他秃鹫在寻找食物时也变得咄咄逼人;朝着头秃鹫的不同方向移动,下式用于对该运动建模:
80、p(i+1)=r(i)-|r(i)-p(i)|×f×levy(d) (33)
81、式中,levy(d)为莱维飞行机制,用以提高式中的秃鹫种群的有效性,其每一步方向完全随机且各向同性,步长为重尾分布。
82、作为本发明再进一步的方案:步骤四中,对于非洲秃鹫算法的改进,具体包括:
83、首先,在秃鹫种群的位置更新过程中,加入非线性自适应递增惯性权重因子ω,其计算公式如下:
84、
85、其中,α和β为初始最优秃鹫和次优秃鹫的选择因子,rand为0~1的随机数;
86、之后,在探索阶段和开发阶段的秃鹫位置更新公式中引入非线性自适应递增惯性权重因子ω,该过程如下式所示:
87、
88、
89、
90、通过上述公式对秃鹫的位置进行优化更新;
91、同时,在秃鹫的每次迭代输出位置,加入了反向学习竞争策略,通过每次的输出最优解,得到反向学习解e_p(i+1),计算公式如下:
92、e_p(i+1)=rand×(ub+lb)-p(i+1) (38)
93、其中,rand为0~1的随机数;
94、通过计算p(i+1)和e_p(i+1)两者的种群适应度,优化得到秃鹫该次迭代的最优位置。
95、本发明的有益效果是:首先根据太空采矿机器人的实际情况,建立其运动学模型。考虑小行星表面崎岖多变的实际情况,在建立电机传递函数的过程中,加入了校正网络环节来提高太空采矿机器人控制系统的整体性能。
96、同时,区别于传统控制系统中参数的人为选取,本发明采用改进的非洲秃鹫优化算法对系统参数进行优化选取;本发明在非洲秃鹫算法的基础上,加入了非线性自适应递增惯性权重因子和反向学习竞争策略,有效增强了算法的局部搜索能力和全局搜索能力,避免算法的局部最优现象,提高了算法的运行时间和鲁棒性;通过改进算法对pid控制系统参数进行优化选取,避免了局部最优问题,增强了太空采矿机器人系统的控制及轨迹跟踪效果。
- 还没有人留言评论。精彩留言会获得点赞!