无人船控制系统的制作方法
本发明属于水域中的无人船作业中的控制相关,涉及无人船控制系统。
背景技术:
1、近年来,随着城区水域面积逐年增加,在绿化、美化人居环境的同时,水域安全以及水域智能化管理也成为政府管理者的迫切需求。
2、全自主水域检测与巡检无人船应该具备自主路径规划,危险水域行人检测警告,实时水质检测及预警,实时图像回传,应急报警救援等功能。
3、无人船不仅应当拥有上述功能,同时也是大规模行业应用解决方案的重要一环,在研发时,设备网络随时可能扩展,应当保留足够灵活的硬件及网络框架和软件接口。但是无人船在进行相关作业时,由于水域环境的复杂性,存在多种障碍物和各种障碍环境,导致无人船控制出现精准度低的问题。
4、针对目前的水域作业问题,亟需无人船控制系统。
技术实现思路
1、本发明目的在于提供无人船控制系统,通过避障等措施,充分考虑水域的复杂环境,实现了有效控制。
2、为实现上述目的,本发明通过以下技术方案予以实现。
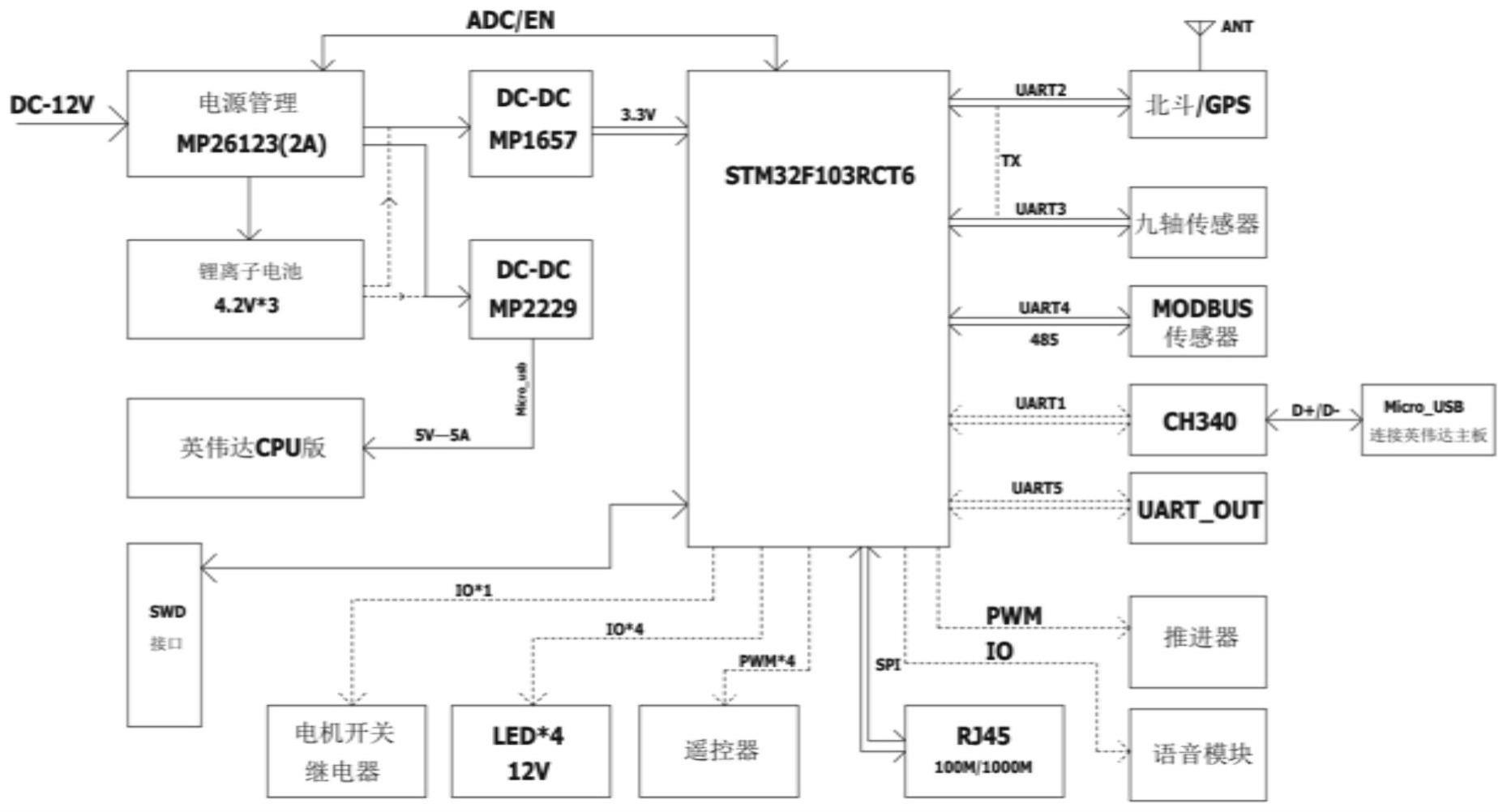
3、无人船控制系统,包括,
4、第一控制组件,所述第一控制组件包括路线设计组件以及图像采集组件,所述路线设计组件包括地图构建组件、避障组件以及路径规划组件,所述图像采集组件包括无人船外周环境的环境图像采集组件以及双目视觉采集组件;
5、第二控制组件,所述第二控制组件包括动力调节组件,所述动力调节组件通过将数据采集组件采集的数据进行动力分配调节,使得全局力度等动态调节;
6、所述数据采集组件包括通过动力分配调节直接作用控制的推进器,定位组件和/或姿态传感组件以及电量等模拟信号采集组件;
7、所述第一控制组件与第二控制组件互相通讯连接。
8、作为本发明的进一步改进,还包括控制单元,所述控制单元包括自动驾驶单元以及手动驾驶单元,所述自动驾驶单元通过接收第一控制组件的指令,沿路径规划组件规划的路径运动;所述手动驾驶单元通过遥控器与第一控制组件以及第二控制组件连接。
9、作为本发明的进一步改进,还包括服务器构成的数据中转站,所述数据中转站用于存储第一控制组件和\或第二控制组件的数据,并将数据传输至终端设备。
10、作为本发明的进一步改进,所述终端设备包括客户端和\或网页前端,所述终端设备与若干个无人船控制系统通信连接,并构建形成局域网,所述局域网连接有vpn通道。
11、作为本发明的进一步改进,还包括数据缓存区以及sram存储区,所述数据缓冲区的刷新率为90-110ms,所述sram存储区设有逻辑代码区以及数据缓存区。
12、作为本发明的进一步改进,所述第一控制组件中,所述路径规划组件,通过获取避障组件的数据信息,结合图像采集组件采集的图像信息,在地图构建组件构建的地图中,经路径规划组件规划带有避障任务的路径。
13、作为本发明的进一步改进,所述避障任务中的避障包括扫描结果与调试软件扫描结果的偏移角度避障、带有避让逻辑的路径避障以及动态调整油门的控制避障。
14、作为本发明的进一步改进,所述扫描结果与调试软件扫描结果的偏移角度避障具体为根据调试软件扫描的输出信息,计算偏移角度,删除重叠数据。
15、作为本发明的进一步改进,所述带有避让逻辑的路径避障包括直线型障碍、l型障碍和死胡同障碍。
16、作为本发明的进一步改进,所述动态调整油门的控制避障具体为通过与双目视觉采集组件之间的协调,通过动态调整总控制油门大小,实现复杂地段的避障。
17、本发明的有益效果如下:
18、本发明中,选用了两个控制组件,其中一个主要用于数据采集,另一个用于数据的分析,以及避障采集,并通过避障数据进行路线的规划,然后再控制之前的控制组件,进行整个运动的控制。
19、本发明中,避障路线,进行了多次的分析和设计,进而充分考虑障碍的多种情况,提高了避障效果。
技术特征:
1.无人船控制系统,其特征在于,包括,
2.根据权利要求1所述的无人船控制系统,其特征在于,还包括控制单元,所述控制单元包括自动驾驶单元以及手动驾驶单元,所述自动驾驶单元通过接收第一控制组件的指令,沿路径规划组件规划的路径运动;所述手动驾驶单元通过遥控器与第一控制组件以及第二控制组件连接。
3.根据权利要求1所述的无人船控制系统,其特征在于,还包括服务器构成的数据中转站,所述数据中转站用于存储第一控制组件和\或第二控制组件的数据,并将数据传输至终端设备。
4.根据权利要求3所述的无人船控制系统,其特征在于,所述终端设备包括客户端和\或网页前端,所述终端设备与若干个无人船控制系统通信连接,并构建形成局域网,所述局域网连接有vpn通道。
5.根据权利要求1所述的无人船控制系统,其特征在于,还包括数据缓存区以及sram存储区,所述数据缓冲区的刷新率为90-110ms,所述sram存储区设有逻辑代码区以及数据缓存区。
6.根据权利要求1所述的无人船控制系统,其特征在于,所述第一控制组件中,所述路径规划组件,通过获取避障组件的数据信息,结合图像采集组件采集的图像信息,在地图构建组件构建的地图中,经路径规划组件规划带有避障任务的路径。
7.根据权利要求6所述的无人船控制系统,其特征在于,所述避障任务中的避障包括扫描结果与调试软件扫描结果的偏移角度避障、带有避让逻辑的路径避障以及动态调整油门的控制避障。
8.根据权利要求7所述的无人船控制系统,其特征在于,所述扫描结果与调试软件扫描结果的偏移角度避障具体为根据调试软件扫描的输出信息,计算偏移角度,删除重叠数据。
9.根据权利要求7所述的无人船控制系统,其特征在于,所述带有避让逻辑的路径避障包括直线型障碍、l型障碍和死胡同障碍。
10.根据权利要求7所述的无人船控制系统,其特征在于,所述动态调整油门的控制避障具体为通过与双目视觉采集组件之间的协调,通过动态调整总控制油门大小,实现复杂地段的避障。
技术总结
本发明涉及无人船控制系统,包括,第一控制组件,所述第一控制组件包括路线设计组件以及图像采集组件,所述路线设计组件包括地图构建组件、避障组件以及路径规划组件,所述图像采集组件包括无人船外周环境的环境图像采集组件以及双目视觉采集组件;第二控制组件,包括动力调节组件,所述动力调节组件通过将数据采集组件采集的数据进行动力分配调节,使得全局力度等动态调节;所述数据采集组件包括通过动力分配调节直接作用控制的推进器,定位组件和/或姿态传感组件以及电量等模拟信号采集组件;所述第一控制组件与第二控制组件互相通讯连接。本发明中的控制系统由于充分考虑了避障等,然后结合了全局力度等动态调节,提高了控制精度。
技术研发人员:纪峰,赵菲,种睿韬,马一飞,邱馨,王清艺
受保护的技术使用者:陕西环保产业创新中心有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!