基于猎人-猎物优化的多域特征控制系统故障诊断方法
本发明属于优化的多域特征故障诊断方法,涉及一种基于猎人-猎物优化的多域特征控制系统故障诊断方法。
背景技术:
1、航空发动机的运行条件十分恶劣。随着航空发动机在高温、高压等恶劣条件下服役时间的增加,航空发动机各部件以及相应传感器的性能会出现退化,这对航空发动机的安全运行有着很大的威胁。依赖于高精度传感器的航空发动机的性能预测以及健康管理(phm)是航空发动机安全可靠的重要保证。在phm中,基于传感器信号的故障诊断是发动机状态实时监测的一个重要部分。故障的发生不仅还会造成维护成本的提高,也极易引起一些极端的事故。因此,研究更加及时、可靠的发动机故障诊断技术是非常有必要的。到目前为止,航空发动机故障诊断的方法主要有两大类,第一种是基于模型的传统方法。基于模型的方法曾经航空发动机故障诊断的主要方法,卡尔曼滤波器、滑模观测器等是到目前为止成熟的基于模型的故障诊断方法,已经在航空发动机故障诊断领域有了广泛的应用。但对于航空发动机建模来说,由于航空发动机部件众多、结构复杂,耦合机理难以明确,且存在一些半结构化的部件使得航空发动机的高精度建模难以实现,且构建模型具有极大的不确定性。航空发动机高精度建模的问题使得基于模型的故障诊断方法难以取得很好的诊断结果,这使得研究人员转向第二种航空发动机诊断方法:基于数据驱动的航空发动机故障诊断方法。数据驱动的方法相比于传统方法而言不需要航空发动机相关原理以及发动机精确建模的先验知识,可以直接依靠反映故障特征参数的数据来进行故障诊断。近年来,这种方法受到了研究人员的广泛关注,目前已有机器学习、神经网络、深度学习、信号处理等人工智能的方法。对于这些方法的应用来说,如何提取出有效的数据特征是一个难点。本文中采用多域特征提取来提取原始数据的时域特征与频域特征,提高故障诊断的性能。多域特征一般具有维度大,冗余特征多的特点,这不仅会导致分类时间长,还会导致过拟合的问题,严重影响分类精度。因此,对所提取的特征进行选择,除去无用的弱相关特征,选择多域特征的有效子集来描述整个特征空间对故障分类至关重要。特征选择的方法主要有以下几种:过滤器方法、包装器方法、嵌入以及混合方法。元启发式算法在特征选择领域已经有了较多的应用。元启发式算法有着高效的全局寻优能力,在处理大量数据时能够在有限的时间里找到最优的数据子集,同时避免局部最优的陷阱。到目前为止,具有优越收敛性的多种元启发式算法已经被用来进行多个领域的特征提取。此外,粒子群算法、蜜獾优化算法、蚁群优化算法等优化方法也已经在计算机特征选择、人类语言特征选择、故障检测特征选择方面取得了极好的效果。因此本文选择猎人-猎物优化算法进行航空发动机故障数据特征的选择。
2、在机器学习的方法中,支持向量机(svm)是由vapnik等人提出的一种基于统计学习的分类算法。svm具有良好的泛化性能,能够利用核函数解决数据维数问题,且在解决非线性分类问题上有着很好的性能。
技术实现思路
1、要解决的技术问题
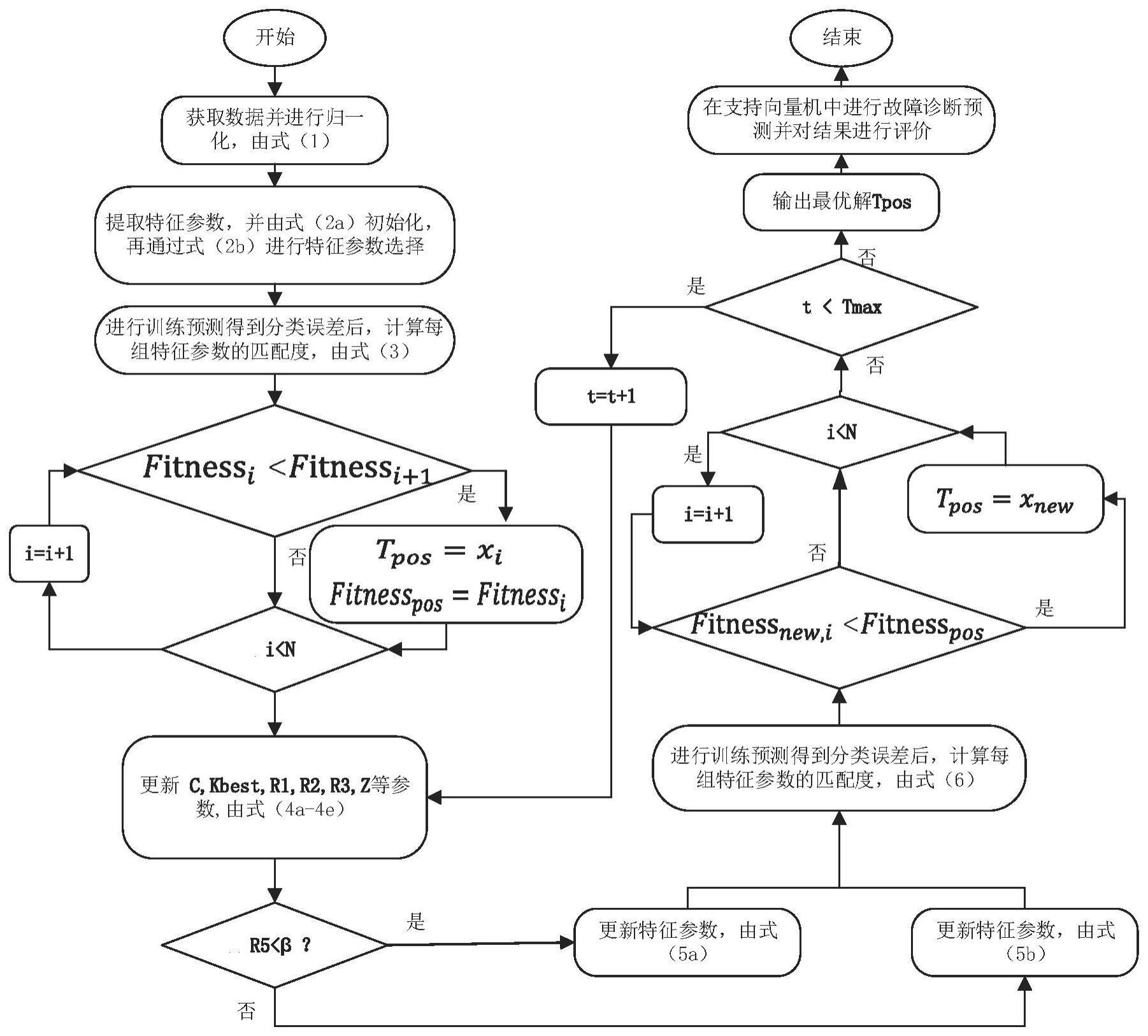
2、为了避免现有技术的不足之处,本发明提出一种基于猎人-猎物优化的多域特征控制系统故障诊断方法。航空发动机是个复杂的多部件耦合系统,为了更加及时与准确地监测航空发动机运行工况,并对航空发动机运行故障做出精确的诊断与处理。针对航空发动机控制系统传统故障诊断方法诊断精度低且实时性差的问题,提出一种基于数据驱动与元启发式算法优化的故障诊断方法。猎人-猎物算法是近年来最新的基于种群的元启发式算法之一,该算法从狮子、狼等捕食者狩猎群居动物的行为中获得灵感。该算法很好地平衡了优化过程的探索与开发阶段。算法的整个流程以及特征参数选择操作如图1所示。
3、技术方案
4、一种基于猎人-猎物优化的多域特征控制系统故障诊断方法,其特征在于步骤如下:
5、步骤1:从航空发动机的传感器中获取故障运行数据y2与实际正常运行数据y1,将所获得的数据进行归一化处理,归一化于0到1的区间里:
6、
7、其中,yk是所要处理的原始数据,是原始数据对应的归一化数据,其中:表示归一化后实际故障运行数据,表示归一化后实际正常运行数据;ymin与ymax分别代表这类数据的最小值与最大值;
8、步骤2:从归一化后的数据中提取特征参数xi,包括运用时域特征提取技术和快速傅里叶变换提取的时域和频域特征参数:
9、通过下式选择特征参数,由于每组特征参数只能被选择或者未选择,选择过程具有二进制特性:
10、xi=lbi+rand×(ubi-lbi);rand∈[0,1]
11、随后通过下式进行二进制转换,得到一个特征参数子集,其中0代表未被选择,1代表被选择:
12、
13、其中:xi是表示特征参数,lbi与ubi分别代表特征参数的下界与上界,该过程生成n组特征参数,每组特征参数的维数为d,整个特征参数集以一个矩阵表示;0表示对应的特征参数未被选择,1代表对应的特征参数被选中;
14、将特征参数子集的数据分为两组,一组选取总数据集的80%用作训练,另一组采用剩余20%数据作为测试;
15、步骤3:将训练数据输入matlab中的支持向量机(svm)模型进行训练预测,并得到分类误差erri,并计算每组选中的特征参数的匹配度:
16、
17、以最小的fitnessi值所对应的特征参数为最佳特征参数tpos;
18、其中,主要权重w1设置为0.99,次要权重w2设置为0.01,di表示选中的特征参数子集所含特征的个数;
19、步骤4:确定当前最佳特征参数及匹配度后,对hpo算法中平衡参数更新如下:
20、
21、其中,tmax是最大迭代次数,t是当前迭代次数。自适应参数更新如下:
22、
23、
24、其中,与代表一个随机向量,向量的每个值都在0和1之间,r2、r5是0与1之间的随机数;αindex是满足条件(p==0)的向量的特征参数指数;
25、所有特征参数的平均值:
26、
27、将递减机制加入算法中:
28、kbest=round(c×n)
29、步骤5:将更新的参数带入下式,并更新两种情况下的特征参数xnew:
30、
31、其中,β是值为0.1的常数。ppos(j)代表最佳特征参数在参数集矩阵中的位置,r4表示0到1内的随机数;deuc(i)表示欧几里得距离;
32、步骤6:再次通过matlab中的支持向量机模型进行训练预测,并得到分类误差erri,以下式计算已更新的特征参数的匹配度,并与当前最佳匹配度进行比较,若优于当前最佳匹配度,则更新最佳特征参数tpos:
33、
34、步骤7:若已经达到所允许的最大迭次数,即满足终止条件,则输出最终结果,结束迭代;否则返回到步骤4进行下一次循环迭代。
35、所述步骤2的提取特征参数xi,采用时域特征提取技术和快速傅里叶变换方法。
36、所述时域特征提取技术和快速傅里叶变换采用方法发表于文献:h.li,l.gou,y.chen,h.li,fault diagnosis of aeroengine control system sensor based onoptimized and fused multidomain feature,ieee access.10(2022)96967–96983.https://doi.org/10.1109/access.2022.3205105。
37、计算结构的预测是:将最佳的特征参数tpos输入到matlab中的支持向量机进行预测,并对预测结果进行评价,评价指标主要采用平均准确率accmean,由以下公式实现:
38、
39、其中q代表程序运行次数,m代表每次运行程序验证集数据的个数,xa为预测故障。
40、有益效果
41、本发明提出的一种基于猎人-猎物优化的多域特征控制系统故障诊断方法,基于svm已经在航空发动机故障诊断领域有了广泛的应用。因此,本文在研究解决某型航空发动机故障诊断的问题上,提出了一种基于猎人-猎物优化算法的多域特征航空发动机控制系统故障诊断方法。首先基于模型航空发动机际运行的故障数据,进行时域与频域故障特征提取,然后利用猎人猎物优化算法对原始故障数据的多域特征参数进行选择,过滤去冗余特征,减少了冗余信息的影响,降低了分类数据的维数,提升了分类数据的质量。采用svm作为分类器对优化算法所选择的特征子集进行分类。将所提出方法的分类结果与基于未选择特征和原始数据的svm分类结果进行比较。本发明基于选择的高质量特征参数子集,采用支持向量机进行故障诊断,其故障诊断准确性得到有效提高。最后,证明所提出的方法拥有更高的故障分类精确度、更高的执行效率。
42、(1).提出了一种基于猎人猎物优化算法与支持向量机的故障诊断方法,进行时域与频域故障特征提取,过滤去冗余特征,提高故障识别性能;
43、(2).采用支持向量机(svm)作为分类器对优化算法所选择的特征参数子集进行分类。将所提出方法的分类结果与基于未选择特征参数和原始数据的svm分类结果进行比较,证明所提出的方法拥有更高的故障分类精确度及执行效率。
- 还没有人留言评论。精彩留言会获得点赞!