一种工业系统机理建模仿真平台的制作方法
本发明涉及工业自动化、智能化,尤其涉及一种针对复杂工业系统或装备动力学机理的通用系统建模仿真平台。
背景技术:
1、当前,工业互联网及工业智能化建设方兴未艾,迫切需要一套自主可控的工业系统机理建模及仿真软件及成套技术,用于提高产品设计水平,实现生产质量精益管控、智能化及无人化控制。目前主流的工业系统建模仿真软件有matlab/simulink、promodel,simit等,此类软件长于经典控制系统建模,对于工业大数据、人工智能等新兴技术支持度有限。
2、中国发明专利cn201711318215公开了一种工业过程仿真系统及仿真方法,既可以通过在终端设备上输入的工程参数进行建模,也可以通过对实际控制系统的输出控制信号以及工业过程系统的响应信号进行采集,通过终端设备中模型参数识别模型(arx)进行识别、建模和过程仿真。
3、中国发明专利申请cn 114297946a公开了一种实现多学科仿真模型降阶的工业互联网平台,能够根据业务进行仿真结果数据采集和模型训练,制作多学科仿真的模型降阶建模流程,适应更多的学科仿真场景,为工业复杂的仿真场景提供降阶模型建模方案。
4、中国发明专利申请cn111263327公开了一种用于多输入多输出的单环模型的建模方法及其仿真平台,用于建立移动轿车经过基站时的信号传播模型,该专利基于已有软件针对专属问题所构建了建模仿真平台。
5、上述专利申请或者只能在停产并断开原有的闭环回路下进行建模仿真,不易为厂方接受;或者辨识的过程模型仅限于简单的arx线性模型,难以应对复杂的过程建模;或者侧重已有多学科模型的降阶和联合仿真;均不具有普适性。
技术实现思路
1、为了解决上述现存问题,本发明充分利用工业正常生产过程中产生的大数据,将人工智能技术与传统的控制理论融合,构建了一种工业系统机理建模仿真平台;提供了通用型工业建模仿真环境,将连续形式的线性动态系统、离散形式的线性动态系统和基于人工智能技术建立的连续非线性状态空间方程、可组合的离散非线性动态神经网络模型纳入到统一的体系中,进行可视化组合建模及系统仿真;提供了系统辨识、建模、仿真一体化的工作模式。
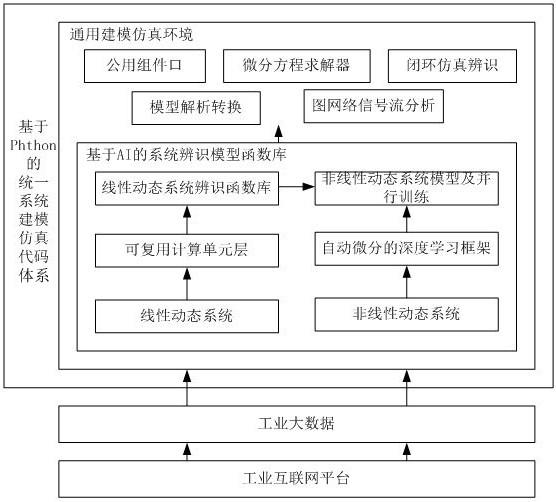
2、本发明提出的工业系统机理建模仿真平台,包括:基于python的统一建模仿真代码体系、基于ai的系统辨识模型函数库、通用系统建模仿真环境。
3、所述的基于python语言的统一系统建模仿真代码体系,包括科学计算库和控制函数库,用于支撑系统辨识模型库和建模仿真功能的构建。所述的控制函数库支持线性/非线性动态系统的模型表达,支持状态空间、传递函数计算,支持微分/偏微分方程求解,非线性优化,稳定性分析等基础功能。
4、所述基于ai的系统辨识模型函数库,是在前述基于python的统一系统建模仿真代码体系上构建,支持线性动态系统和非线性动态系统的辨识。其中,线性动态系统包含连续形式的线性动态系统和离散形式的线性动态系统,具体包含多输入单输出的连续传递函数、离散传递函数、和状态空间方程。
5、线性动态系统辨识模型函数库通过可复用计算单元层,构建各种离线和在线自适应辨识函数,具体构建步骤如下:
6、s201:对于连续传递函数,可复用计算单元层包括频谱分析、状态变量滤波、和s-k迭代算法,在此基础上构建了频率响应估计、传递函数辨识、噪声谱估计辨识函数;
7、s202:对于状态空间方程,可复用计算单元层抽象出包括正交投影运算、hankel矩阵运算、广义能观矩阵运算的运算单元,之后构建n4sid、moesp、cva子空间辨识函数,以及parsim、ivm改进型子空间辨识函数;
8、s203:对于离散传递函数,可复用计算单元层提取z多项式运算、diophantine方程求解、抽象递推新息的计算单元,构建了armax、oe、辅助变量、广义最小二乘等辨识函数;
9、s204:利用抽象递推新息单元构建各种形式离散传递函数的在线自适应辨识算法,以及状态空间方程的在线自适应辨识算法。
10、所述状态空间方程和离散传递函数模型也支持pem系列的自动微分的迭代方法辨识,采用梯度下降方法优化辨识参数,选择pytorch作为自动微分优化求解器。
11、状态空间方程按照模型定义式辨识优化参数,支持批次数据的辨识,离散传递函数模型的梯度优化方法具体步骤如下:
12、s211:针对z离散传递函数形式(以双输入为例):
13、;(1)
14、其中,为输出,、均为输入;z为离散传递函数算子,均为阶数已知,系数未知的z多项式表达式 ;,,,,;、、、分别为多项式的阶数;、、为多项式系数。
15、经过z多项式运算,可以整理为:
16、(2)
17、s212:按照上述的表达式,任意离散传递函数t时刻的值可以表达为过去时刻的输入和输出的代数加权和,加权系数由多项式
18、唯一确定;
19、s213:将上述加权系数作为未知的参数向量,通过与对应时刻的输入输出数据排成的向量做内积,计算模型的预测y值;
20、s214:利用pytorch最小化预测与实际值之间的平均误差,辨识求解未知参数;
21、s215:在优化过程中,离散传递函数模型的未知参数会被自动计算梯度,并进行迭代优化。
22、所述非线性动态系统辨识模型函数库利用人工智能技术,对复杂工业过程的动力学非线性动态系统建模。提供连续非线性状态空间方程的并行加速辨识函数,以及提供可组合的离散非线性动态神经网络模型及训练方法。
23、对于连续非线性状态空间方程的并行加速辨识函数,避开逐步循环数值积分,利用tensor向量矩阵运算,直接一次性计算所有时间步的相邻状态差值矩阵,具体步骤如下:
24、s2211:在微分方程模型结构已知的情况下,构建含未知参数的状态导函数向量,在微分方程结构未知的情况下,构建神经网络逼近状态导函数向量,以代表具有时间,状态阶数两个维度的状态矩阵,则相邻两步状态差值矩阵的定义式为,利用4阶龙格库塔公式通过导函数模型一次计算所有时间的相邻两步状态差值矩阵;其中,为模型输入,为模型参数;
25、s2212、在微分方程结构已知的情况下,构建含未知参数的输出函数,否则构建神经网络,计算模型输出,其中,为模型输入,为模型参数,测量实际输出值,则目标函数为
26、,,为可调权重,为均方误差;
27、s2213、确定迭代步数,基于pytorch自动计算未知参数关于目标的偏导数,更新参数或网络权值。
28、本发明中,提供可组合的离散非线性动态神经网络模型及训练方法;可组合的离散非线性动态神经网络模型包含静态神经网络基元、动态神经网络基元、脉冲响应卷积网络基元、和时序接口组件,可通过灵活组合附带梯度的离散传递函数模型(由s215所述)构建过程动态神经网络模型,并提供统一的训练方法。
29、可构建的离散系统动态神经网络模型包括经典的hammerstein-wiener非线性模型,narmax模型,包括但不仅限于间接动态非线性神经网络;特征是输入信号不直接与输出产生动态关系,而是通过未知的函数计算得到的中间量与输出产生非线性动态关联,此类模型在过程建模中更为常见。这些模型由于所有环节均可传播梯度,在pytorch深度学习框架中完成训练。
30、所述的通用系统建模仿真环境,将连续形式的线性动态系统、离散形式的线性动态系统和基于人工智能技术建立的连续非线性状态空间方程、可组合的离散非线性动态神经网络模型纳入到统一的体系中,进行可视化组合建模及系统仿真。建模环境中的公用组件库,包括信号源、数据集的字段选择器、加法器、延迟器、滤波器、自定义函数等组件;所要辨识的模型也封装为组件,确定模型参数后,均以可视化拖拽的方式建模工业系统。
31、所述系统仿真主要包括以下步骤:
32、s301:对建模系统的信号流、图网络进行分析,获取模型间的连接关系,计算输入、输出及邻接矩阵;
33、s302:对线性动态系统、非线性动态系统模型进行解析,转换为统一的状态空间方程或direct-form ii传递函数形式,利用输入输出数据估计每个模型的初始状态,对齐延迟;
34、s303:采用面向图结构的序贯模块仿真技术进行系统仿真,使用数值积分法求解微分方程组、差分方程组、微分代数方程(dae),计算状态矩阵,缓存输出响应,并处理代数环问题。
35、所述的系统建模仿真环境,是辨识建模仿真一体化的云端平台。所述的系统辨识函数封装为模型组件,通过拖拽的方式组合建模,其输入输出与其它模型组件或数据集的字段选择器连接,通过自动正反向数据提取功能计算辨识函数所需的输入输出数据并完成辨识。完成所有环节的模型辨识后,忽略字段选择器,对整个系统的动态进行仿真,计算所有模型的仿真输出。
36、所述的自动正反向数据提取功能中,通过正反向递归运算在系统图网络模型中自动提取辨识组件所需的输入输出数据,其正向递归运算主要步骤如下:
37、s311、如果当前节点为字段选择器,返回数据集指定字段及范围的时间序列数据;
38、s312、查找当前节点邻接的所有输入节点,在每个输入节点上调用正向递归运算函数获得其输出序列数据;
39、s313、如果当前节点是要辨识的环节,返回所有输入节点的动态输出序列数据;否则拼接所有输入节点的动态输出序列数据,计算当前节点的前向动态输出;
40、其反向递归运算主要步骤如下:
41、s314、如果当前节点为字段选择器,返回数据集指定字段及范围的时间序列数据;
42、s315、查找当前节点邻接的所有输出节点,在每个输出节点上递归调用反向运算函数获得其进入分支(当前节点到某输出节点)的序列数据;
43、s316、查找当前节点邻接的所有输入节点,在每个输入节点上调用正向递归运算函数获得其输出序列数据;
44、s317、如果当前节点是要辨识的环节,返回所有的输出序列数据;否则拼接所有输出及进入分支除外的输入序列数据,计算当前节点的反向动态输出,得到进入分支的时间序列数据。
45、平台支持批量数据的辨识,可以选择多批次数据作为训练和测试集进行辨识,之后启动所述的自动正反向数据提取功能得到所需的输入输出数据。
46、所述的辨识建模仿真一体化,还包括在系统仿真中进行过程闭环辨识,具体步骤如下:
47、s321:辨识闭环系统中所有控制环节的模型;
48、s322:使用开环方法辨识过程模型,作为模型初始值;
49、s323:对闭环系统进行一轮仿真,即计算当前时刻过程模型的输出,然后反馈到所有控制环节,计算控制输出,再计算下一时刻的模型输出,直到完成所有时间点的仿真;
50、s324:计算过程环节仿真的输入输出,和实际采样的过程输入输出进行比较,将平均误差作为目标函数,利用pytorch自动计算目标函数关于过程参数的偏导数;
51、s325:更新一步过程参数,返回步骤s323,直到过程参数无显著变化。
52、本专利提出的闭环系统辨识方法是在闭环系统仿真中检验过程模型对反馈控制的实际作用,在系统全局优化中迭代更新过程参数,这样辨识得到的过程更符合全局动态及物理特性,而不仅仅是局部过程环节上的数值拟合。
53、本发明的有益效果在于:本发明通过融合人工智能技术与传统的控制理论,构建了一种工业系统机理建模仿真平台,解决工业互联网及工业智能化建设所需的工业系统辨识,高端装备国产化所需的动力学模型构建问题,并为高端控制器的设计提供可靠的系统模型。
54、相比于现有技术,本发明通过平台提供了成套的动力学建模技术,尤其对复杂的非线性动态系统,充分利用人工智能建模优化技术,构建了更为灵活的非线性模型,提供了辨识建模仿真一体化技术及并行化加速方法,以适应复杂多变的物理过程建模场景。
- 还没有人留言评论。精彩留言会获得点赞!