用于航天器控制系统的半实物仿真总控系统的制作方法
本申请属于仿真试验领域,具体涉及一种用于航天器控制系统的半实物仿真总控系统。
背景技术:
1、随着航天器控制系统功能的日益复杂,控制系统所包含单机实物也随之增多。同步地,半实物仿真试验所需实物也同样增加。在实物状态繁多的试验状态下,由于各单机与相应仿真配套设备均有严格的操作流程,设备之间也有严格的操作顺序,需要较多不同岗位的试验人员且对各岗位试验人员的配合度有较高要求;因此,现有的半实物仿真试验增加了人力成本、学习成本、试验流程运行时间、试验人员的误操作概率,降低了试验的效率与可靠性,亟需一种能够支持复杂半实物试验状态的总控系统,以提高试验效率,降低操作复杂度与误操作概率。
技术实现思路
1、为至少在一定程度上克服相关技术中存在的问题,本申请提供了一种用于航天器控制系统的半实物仿真总控系统。
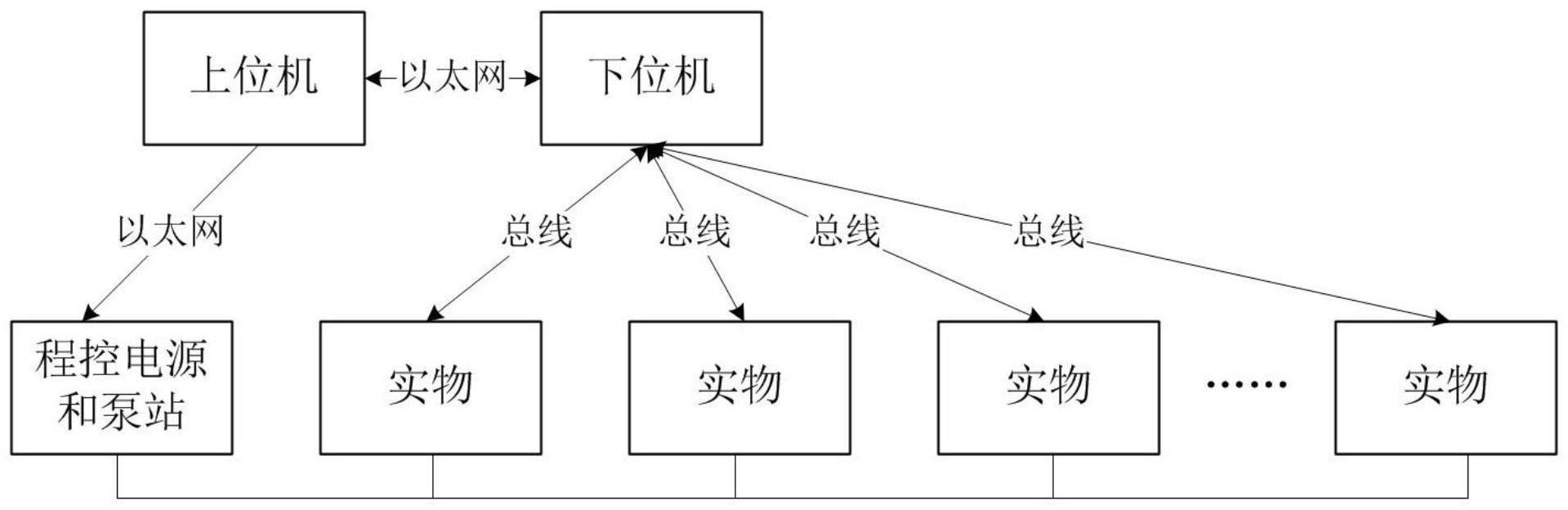
2、根据本申请实施例,本申请提供了一种用于航天器控制系统的半实物仿真总控系统,其包括上位机、下位机、程控电源和泵站以及两个以上实物;
3、所述上位机中运行有windows系统并配置有上位机软件;所述下位机中运行有实时操作系统并配置有下位机软件;
4、所述上位机通过以太网与所述下位机进行信息交互,所述下位机通过总线与各所述实物进行信息交互,所述上位机通过以太网与程控电源和泵站进行通信,所述程控电源为各所述实物进行供电,所述泵站为各所述实物提供压力。
5、上述用于航天器控制系统的半实物仿真总控系统中,所述上位机软件用于控制以太网协议设备、加载和卸载下位机软件、控制试验的运行和停止、获取试验运行参数、获取下位机模型算法数据、实时显示下位机模型数据、向下位机发送试验用例参数以及记录试验日志。
6、上述用于航天器控制系统的半实物仿真总控系统中,所述下位机软件用于运行火箭动力学模型、gnc系统算法、时序控制、通过以太网与上位机软件进行交互,使用各总线与各单机和仿真设备进行交互。
7、上述用于航天器控制系统的半实物仿真总控系统中,所述下位机配置有1553b总线、rs422总线、光纤总线和di/o板卡,所述下位机通过1553b总线接收惯组数据和综合控制器的时序,并向飞控计算机发送与接收第一指令;所述下位机通过rs422总线向飞控计算机发送与接收第二指令,向综合控制器发送与接收第三指令;通过光纤总线向发动机模拟系统、三轴转台、单轴转台和卫星导航模拟器发送和接收指令;通过di/o板卡向飞控计算机和综合控制器发送时序开出量与采集开入量。
8、进一步地,所述下位机还配置有定时器卡,所述定时器卡用于提供中断时钟。
9、更进一步地,所述定时器卡采用cpci接口卡,其定时精度为10m。
10、上述用于航天器控制系统的半实物仿真总控系统的运行过程为:
11、确定下位机软件状态、试验用例状态、仿真环境配置、各单机和仿真设备电缆连接状态;
12、在上位机软件中确定所需存储数据、实时显示数据、仿真用例,根据需要选择单次仿真或批量仿真模式,并根据试验目的制定试验流程,控制各程控电源和泵站;
13、启动上位机软件,按照设计流程启动自动执行各设备上电、加压;
14、上位机软件控制启动下位机软件,下位机进行各板卡初始化、与各设备通讯校验、检查各设备返回的自检信息;
15、下位机软件进行环境配置、仿真参数初始化、仿真用例选择初始化;
16、下位机软件进入仿真流程,运行动力学模型、gnc算法、时序功能,向不同单机设备发送与接收实时计算的指令;
17、单次或多次批量仿真试验结束后,导出试验数据与运行日志,完成本轮试验。
18、进一步地,所述下位机软件进入仿真流程,运行动力学模型、gnc算法、时序功能,向不同单机设备发送与接收实时计算的指令的过程为:
19、下位机通过光纤总线向发动机负载模拟系统发送力矩指令、向单轴转台与三轴转台发送角度与角速度指令、向卫星导航模拟器发送速度位置姿态角指令并接收以上各设备回令,通过1553b总线、rs422总线和di/o板卡向飞控计算机和综合控制器发送与接收时序指令,飞控计算机采集惯组、陀螺、卫星导航接收机、伺服机构信息,经控制系统计算后发送给伺服机构作动指令,下位机接收发动机负载模拟系统摆角信息,闭合进入模型运算,形成硬件在环试验。
20、进一步地,如果下位机在进行各板卡初始化、与各设备通讯校验、检查各设备返回的自检信息的过程中出现异常,则所述下位机向上位机返回信息,所述上位机逐步执行各设备卸载操作。
21、进一步地,所述试验流程包括加载实物操作流程和卸载实物操作流程,所述加载实物操作流程为:惯组、陀螺、飞控计算机、综合控制器、卫星导航接收机上电,发动机模拟系统加压;所述卸载实物操作流程为:惯组、陀螺、飞控计算机、综合控制器、卫星导航接收机下电,发动机模拟系统泄压。
22、根据本申请的上述具体实施方式可知,至少具有以下有益效果:本申请提供的用于航天器控制系统的半实物仿真总控系统通过设置上位机和下位机的配置模式,下位机中运行有实时操作系统,上位机可以根据试验需求按自动流程控制下位机与各实物交互,保证上位机和下位机与各实物交互的实时性,能够大幅提高试验效率与可靠性,并降低人员需求,同时能够实现批量硬件在环试验,进一步节约运行时间。
23、应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本申请所欲主张的范围。
技术特征:
1.一种用于航天器控制系统的半实物仿真总控系统,其特征在于,包括上位机、下位机、程控电源和泵站以及两个以上实物;
2.根据权利要求1所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述上位机软件用于控制以太网协议设备、加载和卸载下位机软件、控制试验的运行和停止、获取试验运行参数、获取下位机模型算法数据、实时显示下位机模型数据、向下位机发送试验用例参数以及记录试验日志。
3.根据权利要求1所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述下位机软件用于运行火箭动力学模型、gnc系统算法、时序控制、通过以太网与上位机软件进行交互,使用各总线与各单机和仿真设备进行交互。
4.根据权利要求1所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述下位机配置有1553b总线、rs422总线、光纤总线和di/o板卡,所述下位机通过1553b总线接收惯组数据和综合控制器的时序,并向飞控计算机发送与接收第一指令;所述下位机通过rs422总线向飞控计算机发送与接收第二指令,向综合控制器发送与接收第三指令;通过光纤总线向发动机模拟系统、三轴转台、单轴转台和卫星导航模拟器发送和接收指令;通过di/o板卡向飞控计算机和综合控制器发送时序开出量与采集开入量。
5.根据权利要求4所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述下位机还配置有定时器卡,所述定时器卡用于提供中断时钟。
6.根据权利要求5所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述定时器卡采用cpci接口卡,其定时精度为10m。
7.根据权利要求1所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述半实物仿真总控系统的运行过程为:
8.根据权利要求7所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述下位机软件进入仿真流程,运行动力学模型、gnc算法、时序功能,向不同单机设备发送与接收实时计算的指令的过程为:
9.根据权利要求7所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,如果下位机在进行各板卡初始化、与各设备通讯校验、检查各设备返回的自检信息的过程中出现异常,则所述下位机向上位机返回信息,所述上位机逐步执行各设备卸载操作。
10.根据权利要求7所述的用于航天器控制系统的半实物仿真总控系统,其特征在于,所述试验流程包括加载实物操作流程和卸载实物操作流程,所述加载实物操作流程为:惯组、陀螺、飞控计算机、综合控制器、卫星导航接收机上电,发动机模拟系统加压;所述卸载实物操作流程为:惯组、陀螺、飞控计算机、综合控制器、卫星导航接收机下电,发动机模拟系统泄压。
技术总结
本申请提供了一种用于航天器控制系统的半实物仿真总控系统,其包括上位机、下位机、程控电源和泵站以及两个以上实物;上位机中运行有windows系统并配置有上位机软件;下位机中运行有实时操作系统并配置有下位机软件;上位机通过以太网与所述下位机进行信息交互,下位机通过总线与各所述实物进行信息交互,上位机通过以太网与程控电源和泵站进行通信,程控电源为各实物进行供电,泵站为各实物提供压力。本申请中上位机可以根据试验需求按自动流程控制下位机与各实物交互,保证上位机和下位机与各实物交互的实时性,能够大幅提高试验效率与可靠性,并降低人员需求,同时能够实现批量硬件在环试验,进一步节约运行时间。
技术研发人员:康健,孙运吉,钟友武
受保护的技术使用者:蓝箭航天空间科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!