一种航天器编队轨迹跟踪分布式控制方法及相关设备
本发明涉及航天器编队轨迹跟踪控制,特别涉及一种航天器编队轨迹跟踪分布式控制方法及相关设备。
背景技术:
1、航天器编队是指由多个航天器根据指定任务需求按一定拓扑链接组成的航天器集群,通过编队内各成员航天器相互合作,从而实现一颗大“虚拟航天器”的功能。编队航天器在轨飞行时,为了实现不同的任务,需要对编队运行轨迹进行跟踪控制,从而达到预定构型。目前已有多种控制方法应用到航天器编队控制,如非线性自适应控制、滑模方法、线性二次调节、ida-pbc(interconnection and damping assignment passivity-basedcontrol,基于图论和互联阻尼分配的无源控制)、脉冲控制、模型预测控制和快速搜索随机树等方法,编队协同方法主要有领导跟随法,虚拟结构法和蜂拥控制等方法。
2、近年来,采用能量思想的port-hamiltonian(ph,端口哈密顿)系统理论逐步兴起并快速发展,为复杂非线性系统建模与控制提供了有潜力的求解方案。另外ph理论从能量的角度出发对系统实现控制,解决了李亚普洛夫函数的选取问题,用其建立的模型更加符合工程实际应用。在航天器编队控制领域,端口哈密顿系统方法得到了初步研究。changliu等将圆形限制性三体问题为为端口哈密顿系统形式,基于能量整形和阻尼注入设计了控制策略,保证了渐近稳定性,并且能够任意设置平衡点。ewoud vos等建立了端口哈密顿系统为的赤道平面二维二体轨道动力学模型,利用广义正则变换方法获得相对目标轨道的误差系统ph模型,然后设计了基于虚拟弹簧阻尼的内部控制律,将每个卫星引导到目标轨道,以及基于虚拟弹簧阻尼交互的分布式相对运动控制律,使多个卫星在轨道上均匀分布。该文是多卫星端口哈密顿系统协同控制的首次尝试,针对的是特殊星座位置保持控制问题;但由于航天器编队轨迹跟踪是时变的,而时变端口哈密顿系统一般不满足无源性。
3、ida-pbc是一种针对非线性系统的控制律设计方法,自从ortega.r等在2001年提出该方法以来,已经应用到非常多的领域,在航天器控制方面也初步得到了应用。如najmehjavanmardi等应用ida-pbc控制方法以及压缩分析设计了跟踪控制律。但是该文的方法仅是基于领导/追随者的一对一跟踪,跟踪控制中缺乏相互协调和反馈机制,如何实现集群网络化的分布式协同控制,该研究并未提供解决思路。
技术实现思路
1、本发明提供了一种航天器编队轨迹跟踪分布式控制方法及相关设备,其目的是为了实现航天器集群网络化的分布式协同控制,并减小各航天器间的相对距离误差。
2、为了达到上述目的,本发明提供了一种航天器编队轨迹跟踪分布式控制方法,包括:
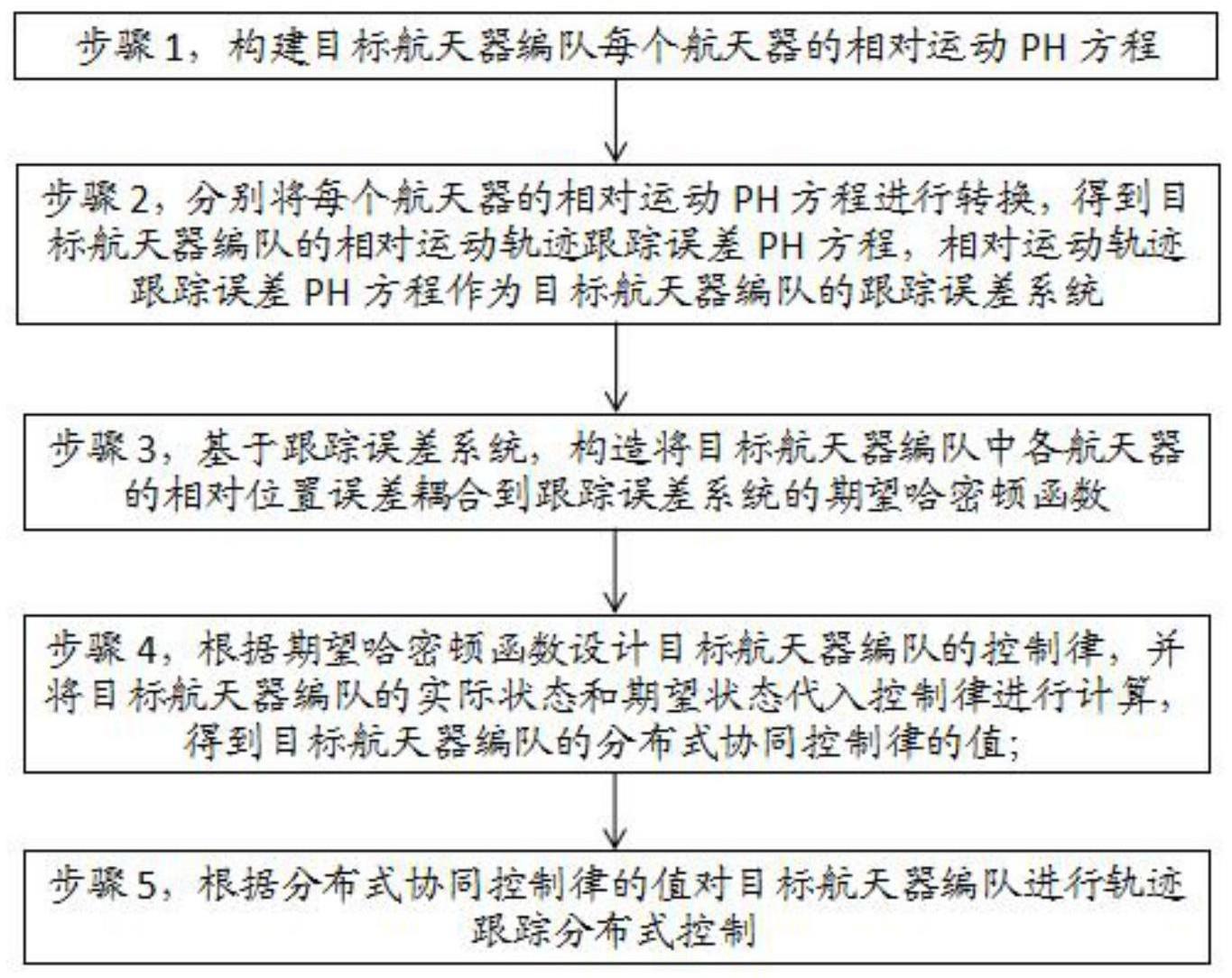
3、步骤1,构建目标航天器编队中每个航天器的相对运动ph方程;相对运动ph方程用于描述每个航天器的相对运动轨迹;
4、步骤2,分别将每个航天器的相对运动ph方程进行转换,得到目标航天器编队的相对运动轨迹跟踪误差ph方程,相对运动轨迹跟踪误差ph方程作为所述目标航天器编队的跟踪误差系统;相对运动轨迹跟踪误差ph方程用于描述相对运动轨迹的跟踪误差;
5、步骤3,基于跟踪误差系统,构造将目标航天器编队中各航天器的相对位置误差耦合到跟踪误差系统的期望哈密顿函数;
6、步骤4,根据期望哈密顿函数设计目标航天器编队的控制律,并将目标航天器编队的实际状态和期望状态代入控制律进行计算,得到目标航天器编队的分布式协同控制律的值;
7、步骤5,根据分布式协同控制律的值对目标航天器编队进行轨迹跟踪分布式控制。
8、进一步来说,每个航天器的相对运动ph方程为:
9、
10、
11、其中,是x的导数,为航天器速度和加速度,j为航天器的互联矩阵,h(x,t)为能量函数,x为航天器的状态变量,t为时间,g无具体物理含义,u为航天器的输入,i为单位矩阵,y为航天器的输出。
12、进一步来说,目标航天器编队的相对运动轨迹跟踪误差ph方程为:
13、
14、
15、其中,为航天器速度误差和加速度误差,in为n阶单位矩阵,n为航天器数量,为矩阵kronecker积,为航天器互联矩阵,为由多个航天器跟踪误差系统组成的航天器编队跟踪误差系统的哈密顿函数,为编队跟踪误差系统状态,为系数矩阵,无具体物理含义,为编队误差系统输出,为系统控制律。
16、进一步来说,分布式拓扑相对位置误差的期望哈密顿函数为
17、
18、其中,n为航天器数量,aij为邻接矩阵元素,aij≠0,kp为互联系数,为航天器i与航天器j之间相对距离保持的误差,xi为第i个航天器的误差,为第j个航天器的误差。
19、进一步来说,步骤4包括:
20、根据由多个航天器跟踪误差系统组成的编队跟踪误差系统的哈密顿函数可得:
21、
22、其中,为目标航天器编队跟踪误差系统状态;
23、分布式拓扑相对位置误差的期望哈密顿函数为:
24、
25、根据若系统中期望哈密顿函数hd(x)、对称矩阵rd(x)≥0和反对称矩阵jd(x)满足偏微分方程的定理,求解匹配方程为:
26、
27、其中,l为拉普拉斯矩阵,a为邻接矩阵,j12为矩阵j的元素,
28、根据和的任意性,满足该方程的条件为j11=r11,j12=i3,可设
29、
30、
31、根据对于系统,若期望哈密顿函数hd(x)、对称矩阵rd(x)≥0和反对称矩阵jd(x)满足偏微分方程的定理,可知系统的控制律为:
32、
33、将代入中,求得目标航天器编队的分布式协同控制律为:
34、
35、其中,kd为阻尼系数。
36、进一步来说,根据目标航天器编队的分布式协同控制律,可求得目标航天器编队的跟踪误差系统中第i个航天器的控制律为:
37、
38、根据跟踪误差系统中第i个航天器的控制律,可得目标航天器编队中第i个航天器的控制律为:
39、
40、其中,
41、本发明还提供了一种航天器编队轨迹跟踪分布式控制装置,包括:
42、构建模块,用于构建目标航天器编队中每个航天器的相对运动ph方程;相对运动ph方程用于描述每个航天器的相对运动轨迹;
43、转换模块,用于分别将每个航天器的相对运动ph方程进行转换,得到目标航天器编队的相对运动轨迹跟踪误差ph方程,得到目标航天器编队的跟踪误差系统;相对运动轨迹跟踪误差ph方程用于描述相对运动轨迹的跟踪误差;
44、构造模块,用于基于跟踪误差系统,构造将目标航天器编队中各航天器的相对位置误差耦合到跟踪误差系统的期望哈密顿函数;
45、计算模块,用于根据期望哈密顿函数设计目标航天器编队的控制律,并将目标航天器编队的实际状态和期望状态代入控制律进行计算,得到目标航天器编队的分布式协同控制律的值;
46、控制模块,用于根据分布式协同控制律的值对目标航天器编队进行轨迹跟踪分布式控制。
47、本发明还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现航天器编队轨迹跟踪分布式控制方法。
48、本发明还提供了一种终端设备,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现航天器编队轨迹跟踪分布式控制方法。
49、本发明的上述方案有如下的有益效果:
50、本发明通过构建目标航天器编队每个航天器的相对运动ph方程用于描述每个航天器的相对运动轨迹;分别将每个航天器的相对运动ph方程进行转换,得到目标航天器编队的相对运动轨迹跟踪误差ph方程,得到目标航天器编队的跟踪误差系统用于描述相对运动轨迹的跟踪误差;基于跟踪误差系统,构造将目标航天器编队中各航天器的相对位置误差耦合到跟踪误差系统的期望哈密顿函数;根据期望哈密顿函数设计目标航天器编队的控制律,并将目标航天器编队的实际状态和期望状态代入控制律进行计算,得到目标航天器编队的分布式协同控制律的值;根据分布式协同控制律的值对目标航天器编队进行轨迹跟踪分布式控制;在本发明设计的分布式协同控制律的作用下,航天器编队能够准确、快速地达到期望的运动轨迹并保持构型,实现了航天器集群网络化的分布式协同控制,相较于现有技术的独立跟随控制律来说,构型保持精度更高,收敛速度更快,施加的加速大更小,同时还减小了各航天器间的相对距离误差。
51、本发明的其它有益效果将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!