一种基于多人博弈的自动驾驶车辆换道轨迹规划方法
本发明属于自动驾驶,具体地说是涉及一种基于多人博弈的自动驾驶车辆换道轨迹规划方法。
背景技术:
1、自动驾驶车辆运用环境感知、决策、规划和车辆控制等关键技术,相较于人工驾驶车辆在交通安全与通行效率方面具有显著优势。随着自动驾驶技术的发展,道路上自动驾驶车辆的占有率将会逐步提升,交通环境中同时包含自动驾驶车辆与人工驾驶车辆将成为常见的交通场景。
2、换道行为是道路上常见的驾驶行为,但是换道过程中车辆冲突的风险上升,容易诱发交通事故。自动驾驶技术有望提升车辆在换道过程中的安全性。自动驾驶车辆的换道算法通常有4个层次:(1)战略规划层,负责规划车辆在出行行程中的行驶路径,会影响车辆的换道选择;(2)战术决策层,负责对车辆的行为进行决策,包括跟驰和换道的选择以及加、减速的选择;(3)轨迹规划层,依据决策行为生成一条安全、合理的换道轨迹,需要依据周边的交通环境进行实时优化;(4)操作控制层,依据轨迹规划层生成的最优轨迹,指挥车辆控制速度、方向沿着轨迹行驶。换道决策和轨迹规划分别属于战术决策层和轨迹规划层。
3、换道决策模型种类众多,包括基于规则的模型、基于效用计算的模型、基于机器学习的模型和基于博弈论的模型等。基于规则的模型预设需要更换车道的场景使得车辆状态满足一定条件就需要换道,然而固定的规则通常难以适应复杂多变的道路环境;基于效用计算的模型为换道、跟驰等行为计算效用,采取效用值最高的行为,该类模型同样难以给出具有泛用性的效用计算法;基于机器学习的模型通过大量数据训练出能够根据当前交通状态判断是否换道的机器学习模型,该方法难以保证决策结果的安全性;基于博弈论的方法是将当前车道和目标车道上的车辆状态都纳入决策过程,考虑多方可能策略之后为意图换道车辆给出最合适的行为决策,能满足复杂交通状态下的换道决策需求。换道博弈模型通常只包含两个决策主体:意图换道车辆和目标车道的后车,然而在车流密度较高的复杂交通环境中换道行为会受到更多周边车辆的影响,因此纳入更多决策主体构成的多人博弈模型更贴合真实的换道过程。
4、换道轨迹规划通常以几何曲线作为生成轨迹的基础,这其中基于多项式曲线的轨迹最为常见,此外正(余)弦曲线、b样条曲线、梯形曲线和螺旋线等也被普遍使用。由于换道过程中交通环境会迅速变化,所以需要频繁对换道轨迹进行修改与优化以确保安全和效率,这项技术被称为动态轨迹规划。
5、现有的自动驾驶车辆换道技术存在以下难点需要解决:
6、1、自动驾驶车辆换道过程中,需要同时兼顾换道决策与换道轨迹规划。若在做出决策后才考虑轨迹线规划,可能导致车辆无法规划出平滑的、符合现实情况轨迹线;
7、2、自动驾驶车辆在做出换道决策时需要考虑前车运动状态,若仅将前车视为匀速运动,在车流密度较高的复杂交通环境中可能导致换道过程中出现安全隐患;
8、3、自动驾驶车辆在换道过程中需要考虑因车辆发生横向偏移导致后车出现超车期望,若仅考虑目标车道车辆,则自动驾驶车在因为目标车道车辆的侵略性而退回原车道时,会产生与后车的潜在冲突。
9、因此,需要提出一种结合多车博弈决策算法与动态轨迹规划的方法体系,应对自动驾驶与人工驾驶混合交通流下的换道场景,提升自动驾驶车辆的换道行为质量。
技术实现思路
1、本发明的目的是针对自动驾驶与人工驾驶混合交通流下的换道场景,提供一种基于多人博弈的自动驾驶车辆换道轨迹规划方法及仿真测试方法。本发明具有如下特点:一、兼顾自动驾驶车辆换道决策和轨迹规划;二、使用支持向量回归模型预测本车道前车与目标车道前车在所需换道时间内的运动状态,减少现有技术将前车视为匀速运动导致的安全隐患;三、将多人博弈理论引入自动驾驶车辆换道轨迹规划方法中,自动驾驶车辆能够根据自身及周围车辆运动状态判断是否继续换道,纳入更多决策主体构成的多人博弈模型可有效考虑目标车道及原车道后车在换道过程中的反应,提高换道安全性;四、自动驾驶车辆换道轨迹规划方法采取五次多项式拟合车辆换道轨迹线,在优化过程中考虑车辆碰撞约束、车辆运动学约束,并在不同情形下规划出符合车辆运动学约束的轨迹线,更符合现实换道过程。
2、本发明的技术方案是:
3、一种基于多人博弈的自动驾驶车辆换道轨迹规划方法,其特征在于,包括以下步骤:
4、s1、获取自动驾驶车辆及其所在车道的车辆信息和目标车道的车辆信息;
5、s2、自动驾驶车辆生成换道意图,根据自身信息与获取的车辆信息,基于支持向量回归模型预测本车道前车与目标车道前车在所需换道时间内的运动状态,根据运动状态判断是否满足换道条件,若满足,则进入s3-1,否则回到s1;
6、s3、建立博弈模型,获得当前时刻的最优换道决策:
7、s3-1、建立自动驾驶车辆(车辆a)与目标车道后车(车辆b)的双人博弈模型,获得当前时刻的最优换道决策:
8、生成a车与b车的效用函数upayoff:
9、
10、
11、式中,分别是车辆a、b的博弈收益函数,角标2表示博弈人数为2;a0是初始状态车辆加速度,aa是车辆的横向加速度即换道决策变量;qa和qb分别是车辆a、b的侵略性系数(侵略系数越大,驾驶员决策时更加倾向于提升效率而非安全性),β(q)是侵略性q的累积分布函数,且0≤β(q)≤1,usafety是安全收益,uspace是空间(效率)收益,δ是前车防碰撞参数,fw是惩罚函数;
12、根据a车与b车的效用函数进行博弈,求解下列博弈的均衡解:
13、
14、式中,xa为自动驾驶车辆a在博弈过程的决策,xa*是自动驾驶车辆a的最优换道决策;xb为目标车道后车b在博弈过程的决策,xb*是目标车道后车b的最优换道决策。
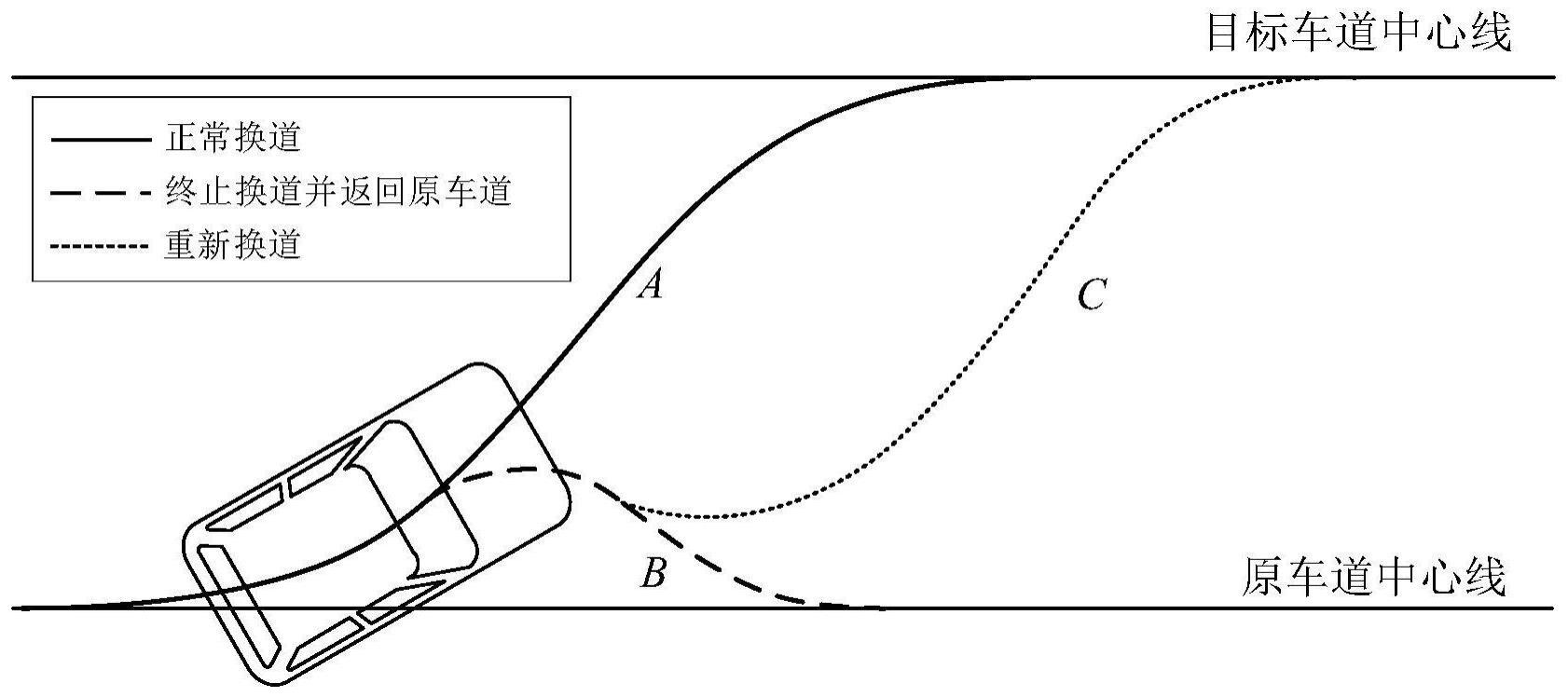
15、若车辆a得到的最优博弈决策为执行换道,则进入s4-1;若车辆a得到的最优博弈决策为返回原车道,则进入s4-2。
16、s3-2、当车辆a选择返回原车道时,可能会与车辆c发生潜在冲突,建立自动驾驶车辆(车辆a)与目标车道后车(车辆b)、原车道后车(车辆c)的多人博弈模型,获得当前时刻的最优换道决策:
17、生成a车、b车与c车的效用函数upayoff:
18、
19、
20、
21、式中,分别为车辆a、b、c的博弈收益函数值,角标3表示博弈者数量为3;ab和ac分别表示车辆b与c的加速度;qc是车辆c的侵略性系数;on是原车道后车的超车期望参数(超车期望参数越高,后车的决策越倾向于加速超越前车而非减速为前车让位);
22、根据a车、b车与c车的效用函数进行博弈,求解下列博弈的均衡解:
23、
24、式中,xc为c车在博弈过程的决策,xc*为c车的最优换道决策。
25、若车辆a得到的最优博弈决策为重新执行换道,则进入s4-3;若车辆a得到的最优博弈决策为返回原车道,则进入s4-2。
26、s4、根据得到的最优换道策略生成换道轨迹,具体为:
27、s4-1、若最优换道决策为继续向目标车道换道,则建立优化模型并采用五次多项式拟合车辆换道轨迹。可根据换道轨迹起终点的车辆运动状态和换道行驶时间tif求解得到车辆在五次多项式轨迹线中行驶过程中的位置、速度及加速度:
28、车辆在轨迹中任意时刻(t时刻)的位置为:
29、
30、
31、式中,xit(t)为车辆在t时刻的水平位置,和分别为轨迹规划时刻(i时刻)车辆的水平速度与加速度,yit(t)为车辆在t时刻的侧向位置,yif为车辆在轨迹规划时刻(i时刻)的位置与目标车道中心线的侧向距离,tif为换道行驶时间,和分别为轨迹规划时刻(i时刻)车辆的侧向速度与加速度。
32、通过将不同的换道行驶时间tif代入到五次多项式轨迹线规划方程中,可以规划出不同的轨迹线,优化模型的目的是从多条可行的轨迹线中,选取兼顾效率与安全性的换道轨迹线,并获得最优的换道行驶时间tif。优化模型的目标函数为:
33、
34、约束为:
35、
36、
37、
38、
39、
40、
41、tmin≤tif≤tmax
42、式中,α1,α2,α3为目标项参数,用以描述对效率与安全的倾向性,和为规划轨迹中最大的水平与侧向速度,和为规划轨迹中最大的水平与侧向加速度,和为规划轨迹中最大的水平与侧向加速度,为允许的最大水平与侧向速度,为允许的最大水平与侧向加速度,xif,分别为换道车辆(a车)、目标车道后车(b车)及目标车道前车(d车)在a车换道轨迹结束时的水平位置,分别为换道车辆(a车)、目标车道后车(b车)及目标车道前车(d车)在a车换道轨迹结束时的水平速度,t为滞后车辆的反应时间,ba,bb和bd分别是a车、b车、d车的减速时的最大加速度,tmin与tmax为最短与最长换道时间。
43、在优化结束后,获得兼顾效率与安全性的最优换道轨迹线,进入s5。
44、s4-2、若最优换道决策为终止换道并返回原车道,则按照上述优化方法与五次多项式轨迹规划方法,生成车辆返回原车道轨迹,在轨迹规划时的目标车道变为原车道,目标车道前车与后车变为原车道前车(e车)与后车(c车),进入s5。
45、s4-3、若最优换道决策为终止返回原车道并重新换道,则按照上述优化方法与五次多项式轨迹规划方法,生成车辆重新换道轨迹,进入s5。
46、s5、根据得到的轨迹行驶一个时间间隔,并更新自动驾驶车辆及其所在车道的车辆信息,若车辆已到达目标车道中心或已返回原车道中心,则结束当前换道轨迹规划,否则重新预测本车道前车与目标车道前车在所需换道时间内的运动状态,若车辆此时在换道或重新换道过程中,则回到s3-1;车辆此时在返回原车道过程中,则回到s3-2。
47、本发明的有益效果为:1)兼顾自动驾驶车辆换道决策和轨迹规划,能够避免部分现有技术仅考虑换道决策而导致的无法规划出平滑的、符合现实情况轨迹线的缺陷;2)使用支持向量回归模型预测本车道前车与目标车道前车在所需换道时间内的运动状态,能够减少现有技术将前车视为匀速运动导致的安全隐患;3)将多人博弈理论引入自动驾驶车辆换道轨迹规划方法中,自动驾驶车辆能够根据自身及周围车辆运动状态判断是否继续换道,可有效考虑目标车道及原车道后车在换道过程中的反应,提高换道安全性;4)自动驾驶车辆换道轨迹规划方法采取五次多项式拟合车辆换道轨迹线,在优化过程中考虑车辆碰撞约束、车辆运动学约束,并在不同情形下规划出符合车辆运动学约束的轨迹线,更符合现实换道过程。
- 还没有人留言评论。精彩留言会获得点赞!