一种教学无人机飞行系统及控制方法
本发明涉及无人机,尤其涉及一种教学无人机飞行系统及控制方法。
背景技术:
1、无人机是一种无人驾驶的航空器,操作人员在底面通过无线电遥控装置,即可控制无人机飞行,无人机具有重量轻、价格便宜和操作便捷等优点,能够在空间狭小的环境中飞行,适用于执行危险任务。
2、随着无人机行业的发展壮大与应用的越来越广泛,针对无人机的教学也逐渐出现在众多高校中,无人机的教学主要包括理论培训以及实际操作培训两部分。
3、但是现有实际操作培训的教学环节中,通常只是单纯的让学生自己操作无人机模拟飞行软件进行自主学习,无法对学生的学习状态进行有效的监测,导致教学过程中无法对处于异常学习状态的学生及时进行发现并处理,不利于老师的教学效率与学生的学习进度。
技术实现思路
1、1.要解决的技术问题
2、本发明的目的是为了解决现有技术中无法对学生的学习状态进行有效的监测,导致教学过程中无法对处于异常学习状态的学生及时进行发现并处理的问题,而提出的一种教学无人机飞行系统及控制方法。
3、2.技术方案
4、为了实现上述目的,本发明采用了如下技术方案:
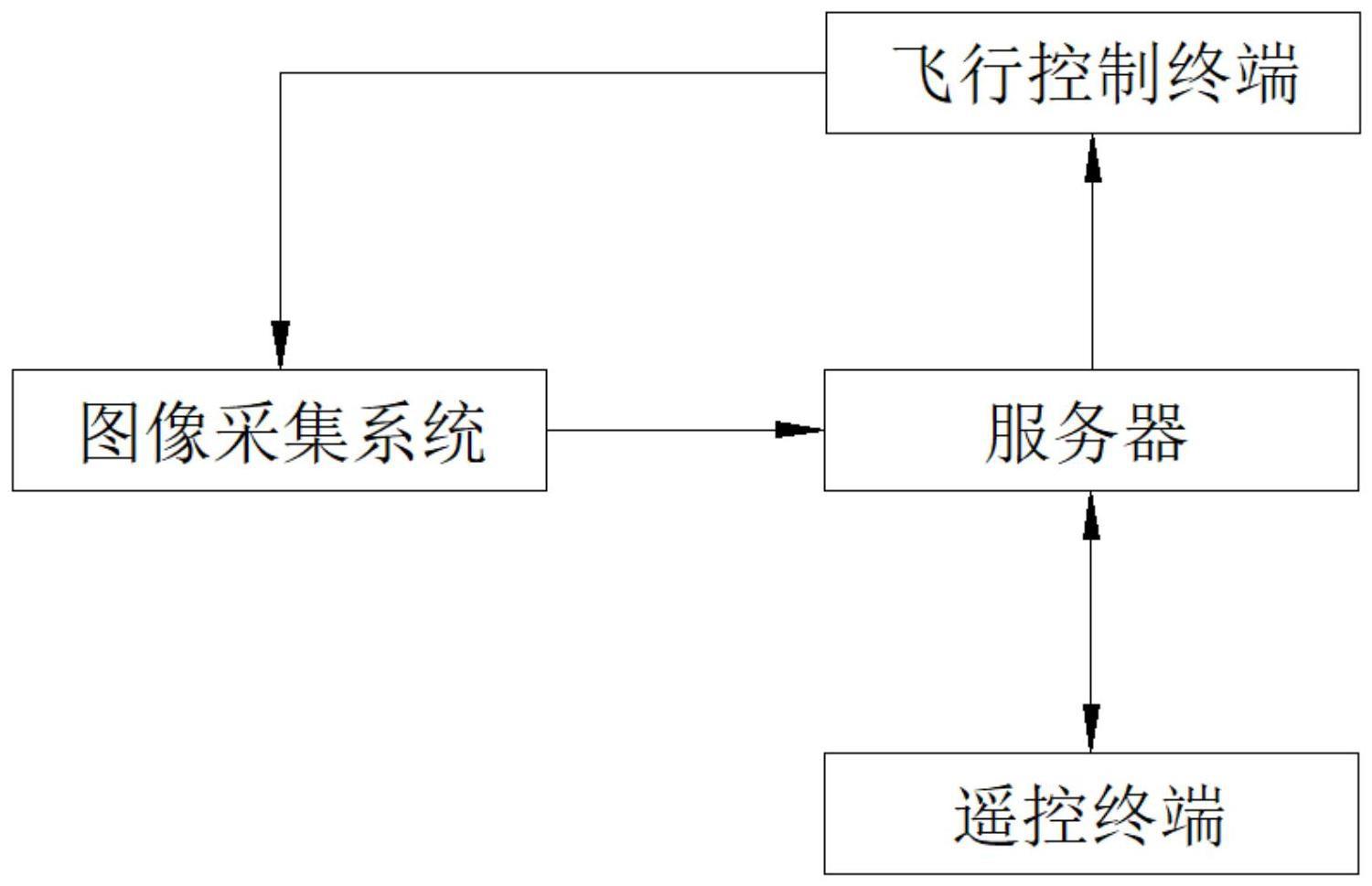
5、一种教学无人机飞行系统,包括图像采集系统、服务器、飞行控制终端和遥控终端,所述图像采集系统的输出端与服务器的输入端连接,所述服务器的输出端与遥控终端的输入端双向连接,所述服务器的输出端与飞行控制终端的输入端连接,所述飞行控制终端的输出端与图像采集系统的输入端连接;
6、所述图像采集系统包括无人机本体,所述无人机本体的顶部设有飞行机构,所述无人机本体内设有控制腔,所述控制腔内设有控制器、第一存储器、第一电源、定位模块和第一通信模块,所述无人机本体的底部固定连接有电机,所述电机的输出端固定连接有摄像头,所述第一电源、摄像头和定位模块的输出端均与控制器的输入端连接,所述控制器的输出端分别与第一存储器、电机和飞行机构的输入端连接,所述第一通信模块的输出端与控制器的输入端双向连接;
7、所述飞行控制终端包括主壳体,所述主壳体的顶部设有控制摇杆和触摸屏,所述主壳体内设有处理器、第二电源、第二通信模块和第二存储器,所述第二电源和控制摇杆的输出端均与处理器的输入端连接,所述处理器的输出端与第二存储器的输入端连接,所述第二通信模块和触摸屏的输出端均与处理器的输入端双向连接;
8、遥控终端,用于接收服务器的数据,用于可视化显示;所述遥控终端用于向飞行控制终端发送控制指令,所述飞行控制终端基于控制指令控制无人机飞行;或,所述遥控终端用于向无人机发送控制指令,所述无人机基于所述遥控终端的控制指令执行飞行动作。
9、优选地,所述无人机本体的顶部设有安装口,所述安装口内转动连接有盖板,所述盖板的一端与安装口的内壁通过固定机构固定连接。
10、优选地,所述固定机构包括固定块,所述固定块与盖板的顶部固定连接,所述无人机本体的顶部设有固定槽,所述固定槽内固定连接有固定杆,所述固定杆上滑动套接有l型卡杆,所述固定块上设有与l型卡杆对应的卡槽。
11、优选地,所述固定杆上套设有弹簧,所述弹簧的两端分别与l型卡杆和固定槽内壁固定连接。
12、优选地,所述摄像头的顶部固定连接有对称设置的多个滑杆,所述滑杆的顶部固定连接有滑块,所述无人机本体的底部设有与滑块对应的环形滑轨。
13、优选地,所述无人机基于所述遥控终端的控制指令执行飞行动作,包括:
14、确定及暂停所述无人机的第一飞行指令;
15、执行所述遥控终端的控制指令。
16、优选地,所述执行所述遥控终端的控制指令,包括:
17、覆盖所述无人机的第一飞行指令,并生成第一飞行路径;
18、根据所述遥控终端的控制指令捕捉目标搜索物;
19、向服务器发送飞行图像。
20、优选地,所述执行所述遥控终端的控制指令,包括:
21、执行所述控制指令内携带的第二飞行指令,并生成第二飞行路径;
22、在完成所述第二飞行指令后切换运行第一飞行指令。
23、本发明中还提出了一种教学无人机飞行系统的控制方法,包括以下步骤:
24、步骤1:通过图像采集系统对飞行图像进行采集,然后将采集数据发送到服务器;
25、步骤2:服务器将数据发送到遥控终端,并以可视化的方式显示,以便飞行指导人员进行观看,然后飞行指导人员根据显示的飞行画面,来发出控制无人机飞行动作的控制指令,并通过遥控终端反馈至服务器;
26、步骤3:服务器将飞行指令发送到飞行控制终端,然后飞行控制终端的学员根据飞行指令对无人机进行控制。
27、优选地,所述遥控终端获取所述无人机控制权限,所述飞行指导人员直接控制所述无人机的飞行动作;所述飞行控制终端输出控制参数及飞行路径。
28、3.有益效果
29、相比于现有技术,本发明的优点在于:
30、(1)本发明中,通过图像采集系统、服务器、飞行控制终端和遥控终端的设置,可以远程的对飞行学员进行监测指导,对处于异常学习状态的学生及时进行发现并处理,从而提升了老师的教学效率与学生的学习进度。
31、(2)本发明中,通过摄像头的设置,可以对飞行图像进行采集,然后将采集数据发送到控制器,控制器并通过第一通信模块将采集数据发送到服务器,同时定位模块的设置,可以对无人机本体的位置进行定位。
32、(3)本发明中,通过第二通信模块可以接收服务器的控制指令,然后通过控制摇杆输入飞行指令,并通过处理器进行处理,然后通过第二通信模块发送到第一通信模块。
技术特征:
1.一种教学无人机飞行系统,包括图像采集系统、服务器、飞行控制终端和遥控终端,其特征在于,所述图像采集系统的输出端与服务器的输入端连接,所述服务器的输出端与遥控终端的输入端双向连接,所述服务器的输出端与飞行控制终端的输入端连接,所述飞行控制终端的输出端与图像采集系统的输入端连接;
2.根据权利要求1所述的一种教学无人机飞行系统,其特征在于,所述无人机本体的顶部设有安装口,所述安装口内转动连接有盖板,所述盖板的一端与安装口的内壁通过固定机构固定连接。
3.根据权利要求2所述的一种教学无人机飞行系统,其特征在于,所述固定机构包括固定块,所述固定块与盖板的顶部固定连接,所述无人机本体的顶部设有固定槽,所述固定槽内固定连接有固定杆,所述固定杆上滑动套接有l型卡杆,所述固定块上设有与l型卡杆对应的卡槽。
4.根据权利要求3所述的一种教学无人机飞行系统,其特征在于,所述固定杆上套设有弹簧,所述弹簧的两端分别与l型卡杆和固定槽内壁固定连接。
5.根据权利要求1所述的一种教学无人机飞行系统,其特征在于,所述摄像头的顶部固定连接有对称设置的多个滑杆,所述滑杆的顶部固定连接有滑块,所述无人机本体的底部设有与滑块对应的环形滑轨。
6.根据权利要求1所述的一种教学无人机飞行系统,其特征在于,所述无人机基于所述遥控终端的控制指令执行飞行动作,包括:
7.根据权利要求6所述的一种教学无人机飞行系统,其特征在于,所述执行所述遥控终端的控制指令,包括:
8.根据权利要求6所述的一种教学无人机飞行系统,其特征在于,所述执行所述遥控终端的控制指令,包括:
9.根据权利要求1-8任一所述的一种教学无人机飞行系统的控制方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的控制方法,其特征在于,所述遥控终端获取所述无人机控制权限,所述飞行指导人员直接控制所述无人机的飞行动作;所述飞行控制终端输出控制参数及飞行路径。
技术总结
本发明公开了一种教学无人机飞行系统及控制方法,教学无人机飞行系统包括图像采集系统、服务器、飞行控制终端和遥控终端,图像采集系统与服务器连接;控制方法包括以下步骤:首先通过图像采集系统对飞行图像进行采集,将采集数据发送到服务器;然后服务器将数据发送到遥控终端,然后飞行指导人员根据显示的飞行画面,来发出控制无人机飞行动作的控制指令,并通过遥控终端反馈至服务器;然后服务器将飞行指令发送到飞行控制终端。本发明通过图像采集系统、服务器、飞行控制终端和遥控终端的设置,可以远程的对飞行学员进行监测指导,对处于异常学习状态的学生及时进行发现并处理,从而提升了老师的教学效率与学生的学习进度。
技术研发人员:张日益,张定华,翟志永,裘广宇,张超,何剑海,徐旭华,王新萍,高琳,马阳,齐嘉铭,尚转,陆依伦,翁磊君
受保护的技术使用者:宁波职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!